

深度学习ADAS系统的方法和步骤
电子说
描述
随着汽车工业的迅猛发展、汽车保有量的增加及驾驶员非职业程度越来越髙,由汽车运输所造成的交通事故、人员伤亡也越来越多。为了降低交通事故的发生,近年来各大汽车公司和科研单位开始研发汽车主动安全控制技术,并逐渐在实车上应用。汽车主动安全控制技术的主要控制目标在于调节轮胎与路面之间的作用力,而这种作用力受路面附着条件的制约。路面状况不仅影响汽车的加速性能、制动性能,还影响汽车的操纵稳定性,因此如何识别汽车与路面间附着状况是汽车各种主动安全电控系统控制策略的关键问题。为使汽车主动安全电控系统能在不同路面上充分利用各种路面最大的附着条件,需对汽车行驶的当前路面状况进行识别并依据识别结果实时调整控制器控制目标
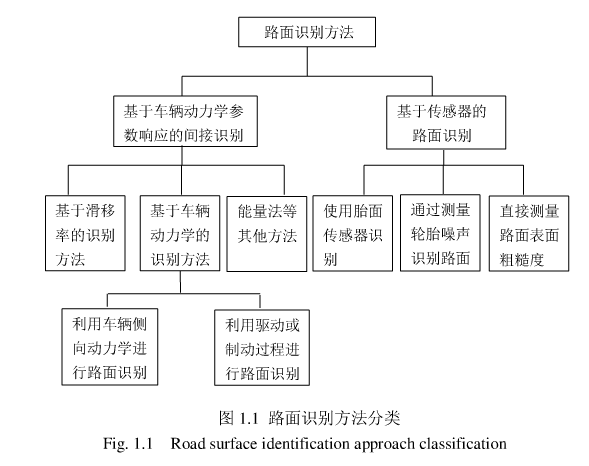
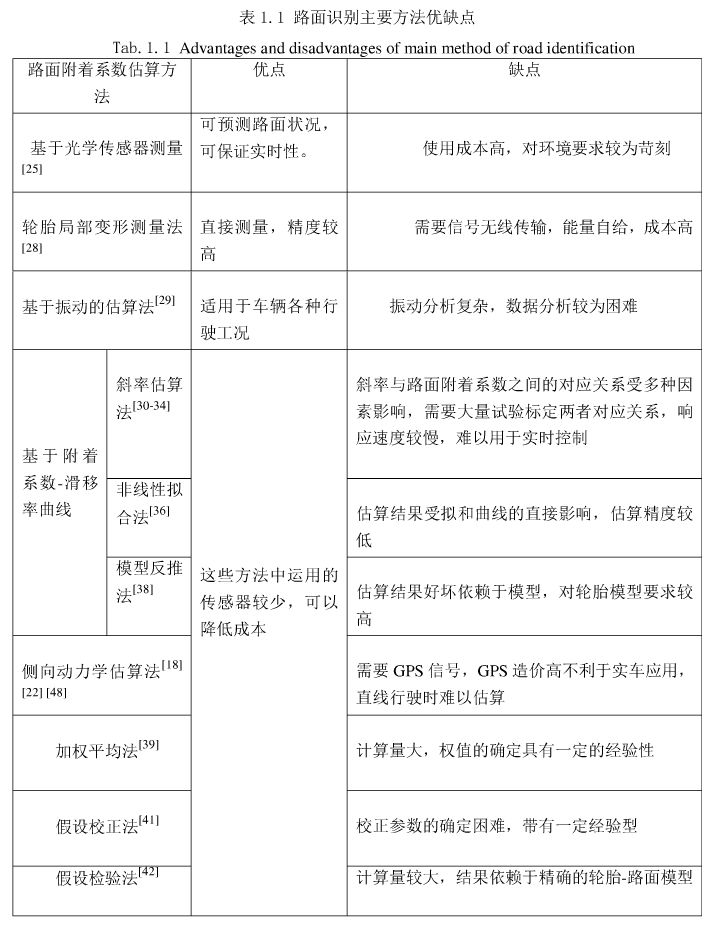
国内外关于路面状况识别大多在平直路面上展开,没有考虑不平路面上路面不平度对识别参数的影响。本文路面识别算法考虑了路面不平度、动载荷等对路面参数、识别方法的影响,在 Burckhardt和 Kiencke两种轮胎模型的基础上,将实际汽车行驶路面划分为6种类型,提出了一种基于“路面状态无量纲特征值”的路面识别方法,得到burckhardt和 Kiencke两种轮胎-路面数学模型6种典型路面特征值门限值(制动力系数一滑移率曲线最佳滑移率前的封闭面积),并依据特征值门限均值定义了6种典型路面的特征区间。根据汽车制动过程中估计的实时路面状态特征值落入的路面特征区间作为当前识别的路面状态,并根据此方法实时估计了当前路面状况下的峰值附着系数和最佳滑移率。为了考虑路面不平度对识别算法的影响,在14自由度整车仿真平台上修正了C级路面上路面特征区间的范围,提高了识别算法在不平路面上的鲁棒性。
建立了含车身纵向、横向、垂向、横摆、俯仰、侧倾运动,四个车轮垂向和转动的汽车14自由度动力学模型,在 MATLAB/ Simulink软件环境下建立整车仿真平台。在各种单一典型路面和对接变化路面、不平路面上进行制动模拟试验,得到了各种典型路面上路面无量纲特征值、识别的路面状态、实时滑移率、附着系数等参数的仿真结果,结果表明识别算法能较快速、准确地识别路面状态。在实验室自制的汽车防抱制动系统试验台上的一次制动试验数据进一步验证了识别算法的可行性。
硏究结果表明,所提出的路面识别方法能够便捷地用于汽车电控制动系统最佳滑移率控制及主动安全控制系统中,提高汽车的主动安全性。但面向联合工况下的路面状态识别及如何提高识别算法在实际控制器中的可靠性仍是一大难题。
-
Pytorch深度学习训练的方法2024-10-28 1068
-
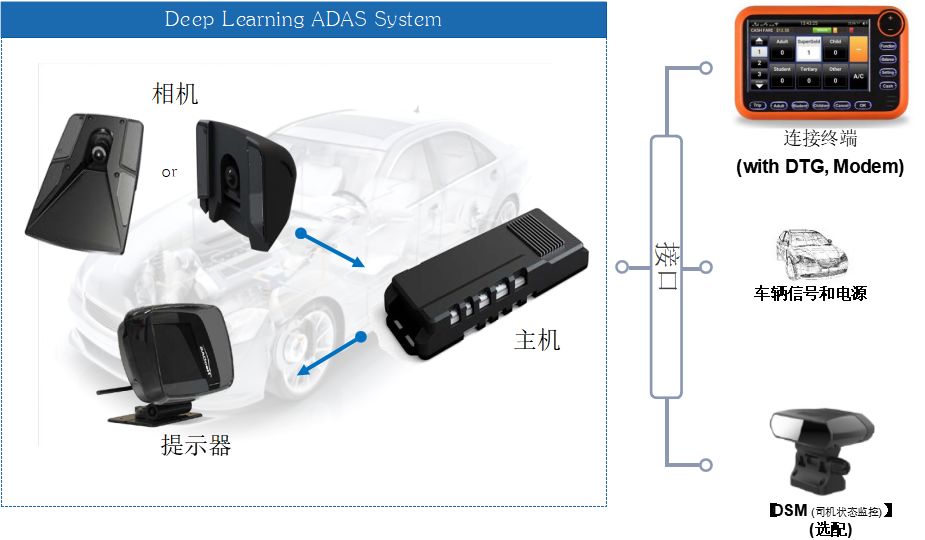
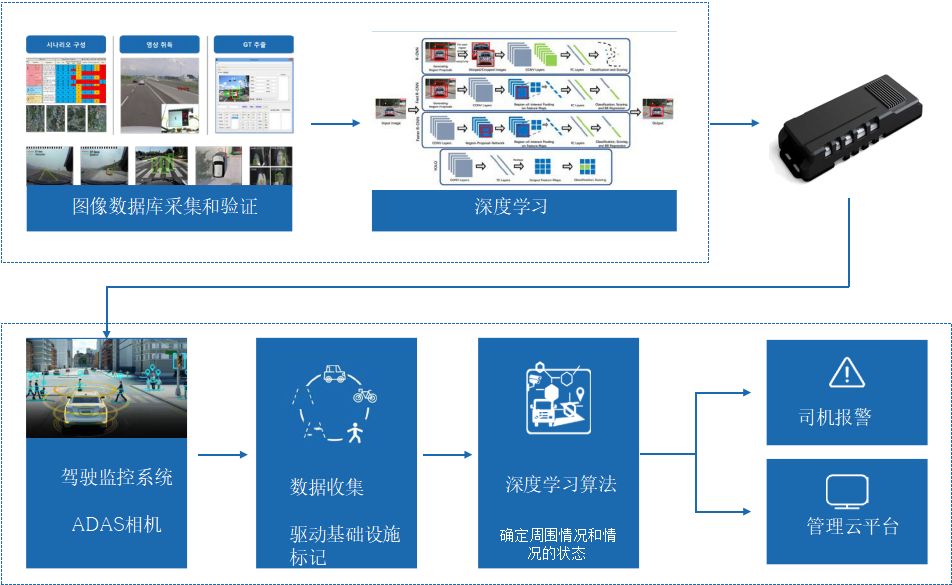
ADAS系统组成简介#ADAS北汇信息POLELINK 2024-08-03
-
深度学习中的时间序列分类方法2024-07-09 2888
-
深度学习的模型优化与调试方法2024-07-01 2502
-
什么是深度学习?使用FPGA进行深度学习的好处?2023-02-17 2029
-
深度学习介绍2022-11-11 751
-
基于深度学习的异常检测的研究方法2021-07-12 1675
-
基于深度学习的ADAS系统,是GPU的主力市场2020-08-22 2956
-
通过深度学习提高ADAS系统的检测速度2020-06-04 3846
-
汽车ADAS应该怎么学习?2020-03-09 2628
-
深度学习在汽车中的应用2019-03-13 3951
-
ADAS要如何运用深度学习?2018-07-15 5601
-
模型驱动深度学习的标准流程与学习方法解析2018-01-24 5352
-
ADAS 市场崛起,这家公司一已将深度学习网络应用到 ADAS 系统中2018-01-15 7097
全部0条评论

快来发表一下你的评论吧 !
