

关于自动驾驶功能确认试验的研究
描述
现代驾驶员辅助系统的不断发展使得汽车驾驶自动化程度日益提升。在电子控制和调节系统得以充分保障的情况下,采用虚拟开发和试验方法可谓是汽车开发过程中固定的组成部分。为了确立自动驾驶功能在汽车市场中的技术地位,除了稳妥可靠地实施其功能要求之外,还必须实现较高的客户效益,因此保证驾驶的灵活性、便捷性、舒适性格外重要,同时驾驶员自身的认可也起着决定性的作用。斯图加特汽车和车用发动机研究所与斯图加特大学开展合作研究,并致力于使驾驶员与新型系统之间实现相互作用。
1 起因
在早期开发阶段要对在环软件(SiL)和在环硬件(HiL)中的全部和部分功能进行试验和确认。为了有效考察驾驶员与相关功能之间的相互作用,该类系统必须在被称为在环驾驶员(DiL)的试验中进行测试。首先,鉴于当前的技术和法律条件,在进行3~5级自动化程度的自动驾驶功能试验时是无法由未经专门训练的普通驾驶员在道路上进行试验的,而在动态行驶模拟器上的虚拟行驶试验则为早期开发阶段进行经济和无风险的重复性试验提供了潜在的可能性。
为了在统计学范畴内获得可进行加权统计的试验结果,试验过程的可重复性就显得尤为重要:如果每种试验车辆仅在完全相同的场景中进行对比的话,那么试验结果即可进行评定比对。如果在试验中使用者对车辆的操控只能产生暂时的影响,那么在该情况下进行的试验可称作一种特别的挑战,因为个人行为无法对试验过程进行充分的保障。
2 动态行驶模拟器的虚拟行驶试验
采用行驶模拟器时,应使驾驶员得到在实际道路交通中行驶的体验,需使其感受到尽可能逼真的驾驶体验。为了实现此类场景感受,需完全真实地模拟对驾驶员的感官刺激。图1所示的斯图加特行驶模拟器组合演示出了真实行驶境况中所出现的纵向及横向加速度,在试验期间驾驶员仿佛置身于其所熟悉并易于操纵的整车环境中,车外环境和其他交通行车人员都借助于360°目视化显示系统投影在拱顶内壁上。
图1 斯图加特行驶模拟器
通过一个由实时汽车模型计算的汽车运动和在环境模拟中的行驶状态处理,可利用车辆自身的位置来调整虚拟环境中的外部交通状况,并描绘出相应的图像。在环境模拟过程中,除了动态物件之外,还存在需通过的路段和道路状况信息,因此存有完整的数据记录,以便自动化系统和模拟传感器能提供相应的信息。
为了借助于虚拟行驶试验考察自动驾驶内容中面临的问题,模拟行驶器中的相应功能必须进行转换。调整试验所需的功能在早期开发阶段往往并不存在,而将现有的硬件或软件组成部分集成到行驶模拟器结构中则又过于费时费钱。出于该原因,在行驶模拟器中依然使用样机功能。
3 模拟环境中不确定成分的影响
只有所有包含在虚拟试验环境中的成分呈现出一个明确的输入-输出状态时,才能确保其试验过程具有可重复性。为了识别出不确定的影响因素,图2中示出了用于试验自动驾驶功能的虚拟行驶试验中试验装备的组成部分,目前总共能识别两个调节回路:在第一个调节回路中,由人操控汽车,并将控制信号传递到汽车上;在第二个调节回路中,则采用自动驾驶功能操控汽车,自动驾驶功能可通过传感器模拟而提供的数据,供行驶轨迹规划器使用。该类行驶轨迹规划器符合汽车行驶轨迹,并由其从属的调节功能使汽车沿着该轨迹行驶,因此自动驾驶的此类经典作用链被称为传感识别、规划和动作。
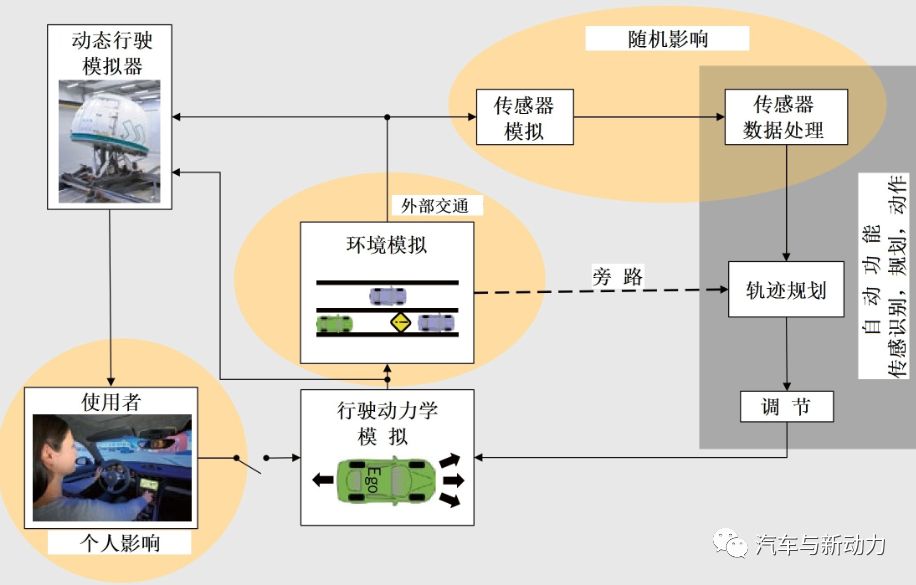
图2 试验方案组成部分
所示的调节回路也包含有任何时候都无法确保输入-输出状态的组成部分。首先,传感器模拟与传感器数据的处理就属于此类。噪声产生的影响较为随机,并且无法保证其为确定的系统状态。此外,在环境模拟中会出现外界交通的干扰并需要予以控制,为了尽可能逼真地显现出外界交通状况,往往需采用较为复杂的模型。为此,偶然控制的外界交通对驾驶员或自动化系统的影响会引起试验过程自身的不可重复性。
最后,甚至驾驶员本身也会呈现出较为不确定的状态。在试验自动化驾驶功能直至第四级自动化程度(高度自动化驾驶)时,由驾驶员短时操控汽车的步骤通常为整个试验的组成部分。在该情况下,必须确定试验本身具有较为重要的意义,在该阶段中需确保试验过程的进行,因此在具有重要意义的试验阶段开始前,需要首先消除对行驶有影响的因素,使其处于可重复的状态。图3按照采用人工和自动驾驶行驶试验的时间流程示出了这种处理方式。
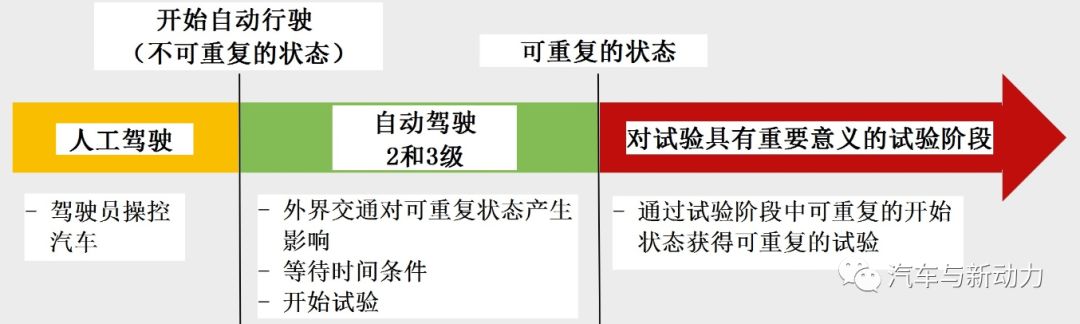
图3 手动和自动驾驶行驶试验的时间流程
4 用于确认自动驾驶功能试验的环境
上文所述的针对试验过程的不确定影响因素在后文介绍的试验环境中应尽可能减少。图4中所示出的较为灵活并且可自由配置的试验环境使其能演示出具有不同程度的自动驾驶功能。通常就试验本身而言,围绕传感器开展的数据处理并无显著意义,而通过旁路的行驶轨迹规划器(见图2)则可根据外界目标、路段属性(道路弯道、交通标志等)以及车辆自身的状态和位置对行驶轨迹作出选择。所有基本真实的数据,可按照该方式准确无误地在规划行驶轨迹时被用作重要参考因素。通过应用理想的(无噪声的)传感器信号,防止随机影响沿着传感识别→规划→动作作用链进行传播,从而使自动化系统的状态得以确定。
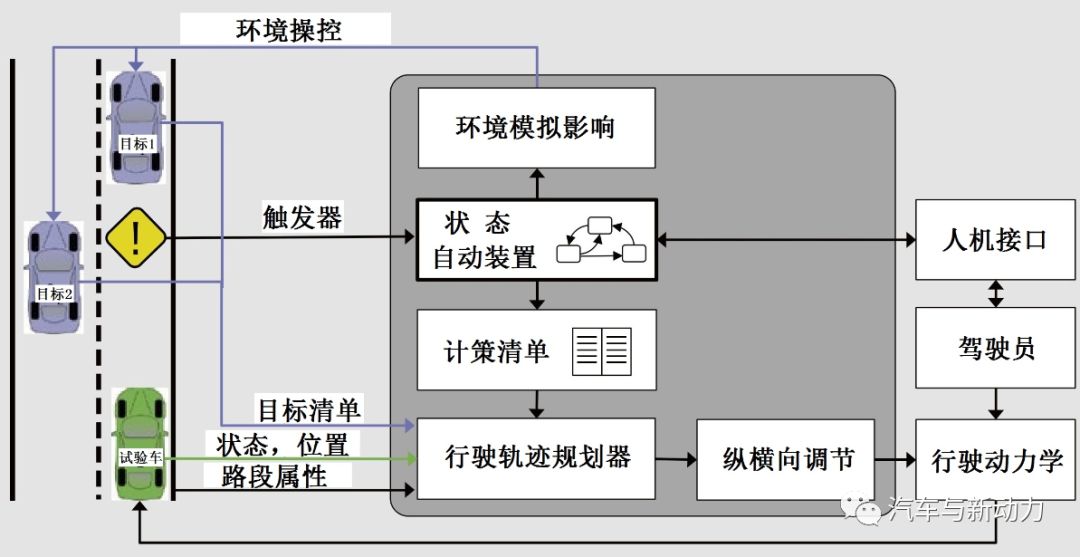
图4 可配置试验环境的功能图
汽车进行自动化行驶的基本功能的调节主要取决于试验环境。行驶轨迹规划器在考虑到在道路规划平面上的车辆行驶轨迹即属于该类型,其中一个调节器承担沿着已规划的行驶轨迹进行纵向及横向调节的任务。该环境的核心部分是一个可使状态进行自由配置的自动化装置,其中配备了试验所需的所有系统方式,可根据人机接口(HMI)、车辆状态或时间条件等使用者输入参数实现状态转换。为了使环境模拟(路段,场景)能对状态转换起到影响作用,可在场景中定义其所处位置或事件触发器。
为了能对自动化行驶车辆本身的行驶状况产生影响,将该自动装置的状态与算法密切联系起来。此类计策可用于变换车道或显示故障状况,并被贮存在算法清单中。若采取一个算法的话,则在行驶轨迹规划时就要考虑到该算法。通过采用一个对环境模拟具有显著效果的模型,即可由试验环境对行驶场景产生影响,以便在对试验具有重要意义的阶段开始时就确立其状态。例如可能会出现外界车辆的扰动,对试验车辆的行为产生影响,同时需避免出现碰撞场景。
5 结论和展望
上文所介绍的试验环境可使得在进行虚拟行驶试验时,能灵活地实现不同自动化程度的自动驾驶功能。通过消除不确定的影响因素,以确保在自动驾驶时获得重复的试验过程。在短时间由驾驶员操控车辆的试验方案中,就会出现难以确定的试验阶段。由于有可能通过试验对环境模拟产生具有针对性的影响,因此可在对试验具有重要意义的试验阶段开始前就确立一个可重复的状态,进而可从该时间点起,使其获得一个确定的试验过程。
灵活的试验环境使其可在对驾驶员状况影响最小的情况下采用未来的调节和通讯方案进行试验。其中自动化程度较高的行驶尚缺乏道路交通经验,恰好在该情况下此类方法可以确保真实的驾驶状况,因而可使其转换成真实的行驶场景。为了通过预先规定的试验条件进一步减少驾驶员的影响,持续开发试验环境。此外,行驶模拟器还要扩展其他的组成部分,以便提高行驶模拟的真实程度。
-
谷歌的自动驾驶汽车是酱紫实现的吗?2011-06-14 0
-
【话题】特斯拉首起自动驾驶致命车祸,自动驾驶的冬天来了?2016-07-05 0
-
自动驾驶真的会来吗?2016-07-21 0
-
细说关于自动驾驶那些事儿2017-05-15 0
-
自动驾驶的到来2017-06-08 0
-
AI/自动驾驶领域的巅峰会议—国际AI自动驾驶高峰论坛2017-09-13 0
-
无人驾驶与自动驾驶的差别性2017-09-28 0
-
UWB主动定位系统在自动驾驶中的应用实践2018-12-14 0
-
如何让自动驾驶更加安全?2019-05-13 0
-
自动驾驶汽车的处理能力怎么样?2019-08-07 0
-
联网安全接受度成自动驾驶的关键2020-08-26 0
-
汽车自动驾驶产业链深度研究报告:自动驾驶驶向何方 精选资料分享2021-08-27 0
-
自动驾驶系统设计及应用的相关资料分享2021-08-30 0
-
自动驾驶技术的实现2021-09-03 0
-
自动驾驶线控底盘VCU功能介绍2021-09-07 0
全部0条评论

快来发表一下你的评论吧 !
