

微机电系统陀螺仪工作原理
描述
MEMS陀螺仪采用的是依赖于相互正交的震动和转动引起的交变科里奥利力。
MEMS陀螺仪利用coriolis,将旋转物体的角速度转换成与角速度成正比直流电压信号,其核心部件通过掺杂技术、光刻技术、腐蚀技术、LIGA技术、封装技术等批量生产的。
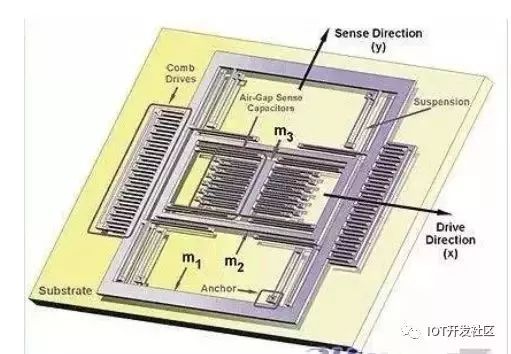
陀螺仪的内部原理是这样的:对固定指施加电压,并交替改变电压,让一个质量块做振荡式来回运动,当旋转时,会产生科里奥利加速度,此时就可以对其进行测量;这有点类似于加速度计,解码方法大致相同,都会用到放大器。
角速率由科氏加速度测量结果决定
科氏加速度 = 2 × (w × 质量块速度)
w是施加的角速率(w = 2 πf)
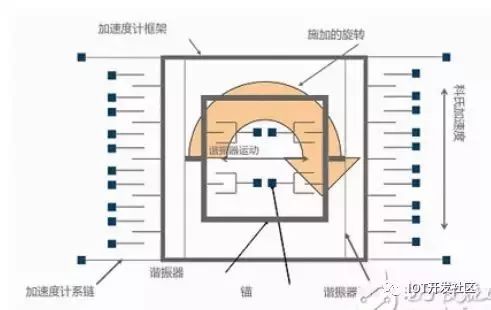
通过14 kHz共振结构施加的速度(周期性运动)快速耦合到加速度计框架
科氏加速度与谐振器具有相同的频率和相位,因此可以抵消低速外部振动
该机械系统的结构与加速度计相似(微加工多晶硅)
信号调理(电压转换偏移)采用与加速度计类似的技术
施加变化的电压来回移动器件,此时器件只有水平运动没有垂直运动。如果施加旋转,可以看到器件会上下移动,外部指将感知该运动,从而就能拾取到与旋转相关的信号。
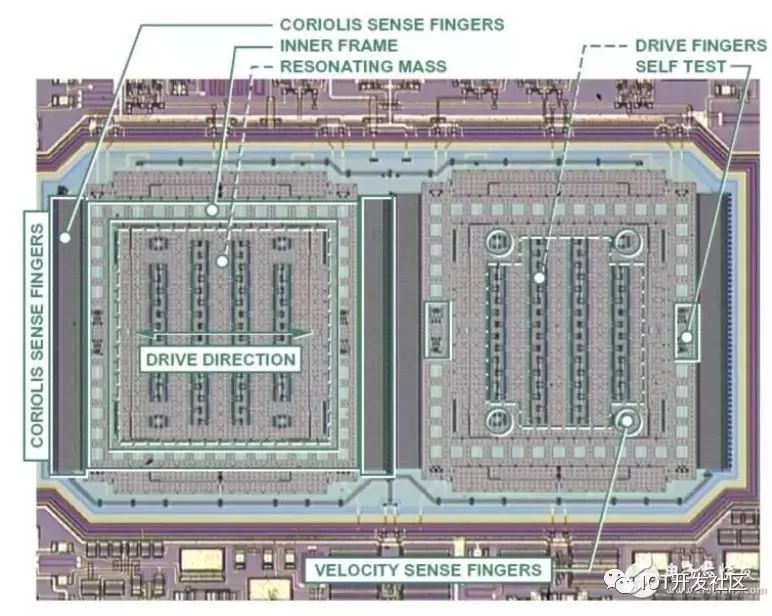
真实的陀螺仪内部构造
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
陀螺仪的基本组成 陀螺仪的工作原理 陀螺仪的作用2023-12-07 1071
-
mems陀螺仪的特点和工作原理解析2018-10-23 0
-
陀螺仪的工作原理科普2019-07-25 0
-
陀螺仪的种类有哪些?2019-09-12 0
-
陀螺仪的应用2020-09-04 0
-
陀螺仪的工作原理及创新应用2020-09-09 0
-
陀螺仪的基本组成及工作原理2020-12-17 0
-
陀螺仪工作原理以及不同种类陀螺仪之间的差异2021-08-06 0
-
介绍加速度计和陀螺仪的数学模型和基本算法2021-08-09 0
-
手机中的三轴陀螺仪2012-04-10 7113
-
光纤陀螺仪工作原理解析2018-10-09 18270
-
分析三轴陀螺仪的工作原理及应用2018-10-23 17828
-
陀螺仪的工作原理及性能特点分析2019-07-11 7120
-
微机械陀螺仪工作原理_微机械陀螺仪的应用2021-02-01 12264
-
三轴陀螺仪是什么 三轴陀螺仪芯片怎么使用2023-07-25 2092
全部0条评论

快来发表一下你的评论吧 !
