

动物在水中有许多创造性的活动方式,而机器人正在“模仿”它们
描述
动物在水中有许多创造性的活动方式,而机器人正在“模仿”它们。
大多数水下机器人运动方式是以下这两种之一:第一种是螺旋桨,第二种是鳍。但是动物告诉我们,水下运动方式还有很多种,可能给机器人带来独特的好处。我们看看今年ICRA发表的两篇论文,展示了仿生水下机器人以创新的方式移动:一个喷射动力的机器人鱿鱼可以跳出水面,另一个机器人扇贝可以像真的一样移动。
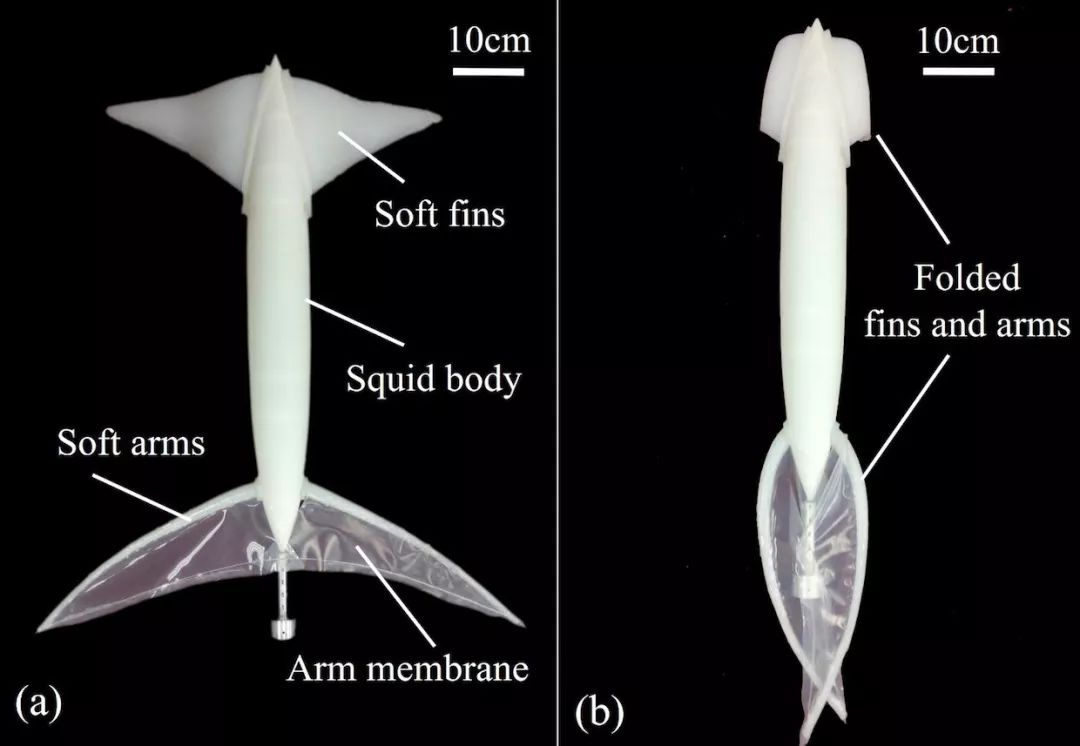
Image: Beihang University
这架来自中国北航大学的“鱿鱼式水上飞行器”是仿照飞行的鱿鱼而设计的。真正的鱿鱼,除了好吃外,可以利用喷水器推进自己前进。而且喷射器足够强大的话,一些鱿鱼不仅可以跳出水面,而且实际上可以通过在空中继续喷射来短时间内实现受控飞行。飞行阶段是通过使用鳍作为手臂和翅膀来产生一点升力来延长的。真正的乌贼使用这种多模态推进来躲避掠食者,而且速度也快得多——乌贼在空中飞行时可以使正常的游泳速度翻倍,每秒飞行50个身体长度。
鱿鱼机器人主要由压缩空气驱动,压缩空气储存在鼻子里的圆柱体中(鱿鱼有鼻子吗?)鳍和臂由气动执行器控制。当机器人想要在水中移动时,它会打开一个值,释放少量的压缩空气;同时释放空气会产生足够的推力,将机器人鱿鱼完全从水中射出。
我们被告知机器人乌贼可以通过跳跃在10到20米之间移动,而在水下使用它的喷射器只需要10米。目前,乌贼只能发射一次喷射器,但研究人员计划用密度更大的气体代替压缩空气,如液态二氧化碳,这将允许长时间的操作和多次跳跃。研究人员说,使用鳍进行动态控制还有很多工作要做,这将“揭示自然飞行乌贼运动的优越性”。
来自中国北航大学的Taogang Hou, Xingbang Yang, Haohong Su, Buhui Jiang, Lingkun Chen, Tianmiao Wang,和Jianhong Liang在2019蒙特利尔国际航展上介绍了“带软变形鳍和臂的鱿鱼式水上飞行器的设计和实验”。
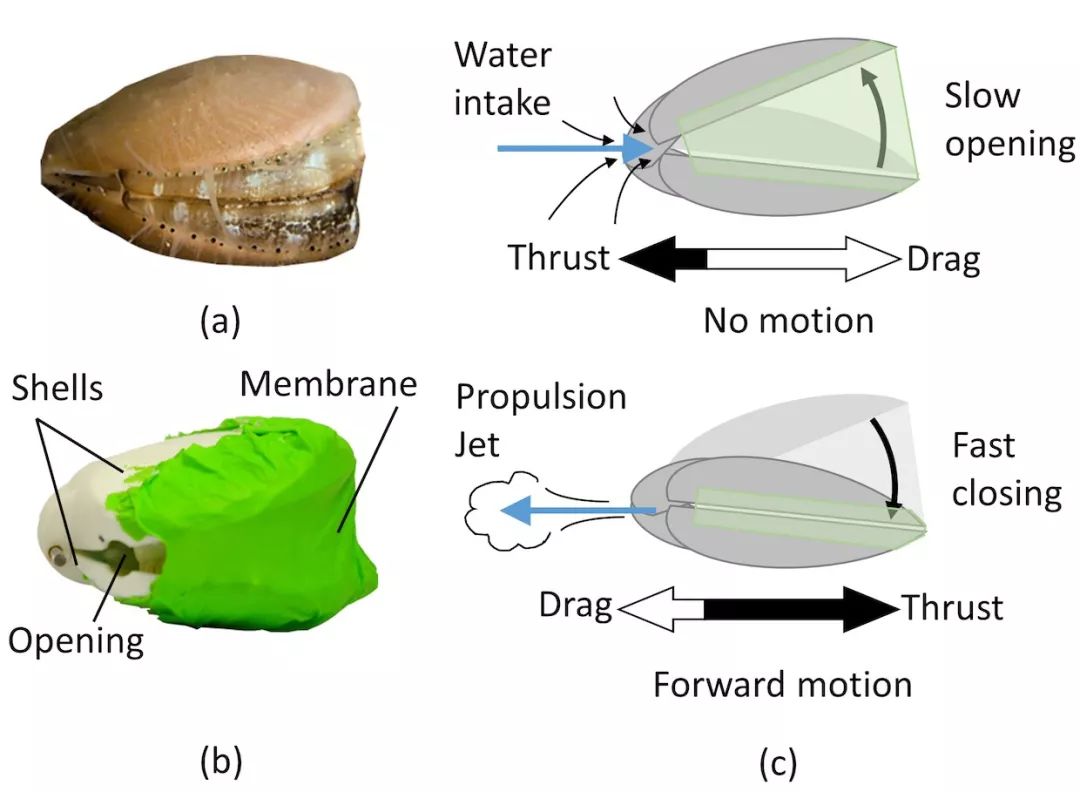
Image: EPFL
机器人扇贝,是一个“Bivalve inspired(双瓣激发)游泳机器人”,来自Jamie Paik领导的EPFL的可重构机器人实验室。真正的扇贝,除了好吃之外,可通过打开和关闭贝壳来推动自己,从背后产生水射流。扇贝通过反复缓慢地打开外壳,然后快速地关闭,可以产生完全在身体内部的向前推力。相对于像鳍或旋转螺旋桨这样的东西,扇贝是简单而结实的,特别是当你缩小比例或开始观察大量的机器人时。EPFL的研究人员将他们的扇贝机器人描述为“一种对危险或持续使用具有鲁棒性的独特组合,在精密环境中安全,设计简单。”
机器人扇贝即使在工作时也是安全的。由于机器人将水吸入,然后立即喷射出来,因此其设计能够抵抗污染,这在海洋环境中可能是一个重大问题。机器人扇贝原型重65克,可以每秒16厘米的速度轻快地前进,而拍手(这是实际的技术)的频率略高于2.5赫兹。虽然机器人扇贝现在还不配备转向功能,但真正的扇贝是可以通过向一侧喷射更多的水来改变方向的,而机器人扇贝也应该能够做到这一点。研究人员还指出,机器人扇贝本身甚至可以兼作钳子,据我所知,这却不是真正的扇贝能做的哦。
-
模仿蚯蚓开发软体机器人2015-01-19 0
-
PS创意——非常酷的动物机器人2015-01-23 0
-
工业机器人的四大核心部件2015-02-12 0
-
当前最实用的十大医疗机器人2015-03-02 0
-
机器人与未来2015-12-29 0
-
各种炫酷的仿生机器人2016-08-24 0
-
智能制造时代来临 工业机器人发展迎来新趋势2017-08-17 0
-
人类与人工智能机器人合作的前景2018-04-16 0
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 0
-
最新机器人报告:未来智能机器人将成家庭重要组成部分2018-12-22 0
-
桁架机器人的概念与特点都有哪些?2020-11-30 0
-
水中机器人电控方案的设计资料分享2021-11-12 0
-
高精度传感器如何在创造机器人的自然动作中发挥作用?2022-03-04 0
-
机器人是什么?2022-03-31 0
-
神奇的机器人世界及其光明的未来2022-04-02 0
全部0条评论

快来发表一下你的评论吧 !
