

如何制作CNC绘图仪
电子说
描述
第1步:什么是绘图仪


因为我已经为初学者做了这个教学,我应该首先详细解释什么是绘图机及其工作原理!
正如维基百科中所定义的,CNC代表计算机数字控制,机器是一种计算机控制的结构,它通过从计算机发送的串行端口接收指令,并根据接收到的指令移动其执行器。这些机器中的大多数是基于步进电机的机器,其中包括主轴的步进电机。
提到“轴”的另一个词,是的,每台CNC机床都有一个由计算机控制的定义轴数程序。
在我们的案例中,我们制造的CNC绘图仪是双轴机床“图1中的细节”,其轴上有一个小型步进电机“步进式图2”这些步进机将移动一个托盘并使其在双轴平面中移动,以使用绘图笔创建绘图设计。笔将使用我们结构中的第三个引擎进行固定和释放,这将是一个伺服电机。
步骤2:步进电机是主要执行器






步进电机或步进电机或步进电机是无刷直流电机电动机将整个旋转分成多个相等的步骤。然后可以命令电机的位置在这些步骤中的一个步骤中移动和保持,而无需任何用于反馈的位置传感器(开环控制器),只要电机在扭矩和速度方面的尺寸小心应用即可。 》第一节,从哪里获得我们项目的步进电机,非常简单,只需抓住一个旧的DVD阅读器,如上图图片1 中的那个,我有2美元,比所有您需要做的是拆卸它以提取步进电机及其支撑,因为它显示图片3 ,我们将需要其中两个。
从DVD读取器获取电机后,您应该通过识别电机线圈结束使它们准备就绪。每个步进电机都有两个线圈,使用万用表,您可以通过测量电机引脚连接器“如图5 ”之间的电阻来识别线圈末端,对于每个线圈,应测量大约100欧姆。识别出电机线圈后,只需焊接一些电线即可通过它们控制电机“见图6”
步骤3:电路图



我们机器的核心是 arduino Nano 开发板,它将根据从计算机收到的指令控制每个执行器的运动,为了控制这些步进电机,我们需要一个步进电机驱动器来控制每个执行器的速度和方向。
在我们的例子中,我们将使用 L293D H桥式电机驱动器“参见图3“它将接收arduino通过其输入发送的电机命令,并使用其输出控制步进电机。
为了将所有需要的部件与我们的Arduino板连接起来我已经制作了电路图显示图1,您应该对步进电机和伺服电机采用相同的连接。
图2通过电路原理图详细说明uit图以及它应该是Arduino和其他组件之间的链接,确保您可以根据需要调整这些链接。
步骤4:PCB制作(由JLCPCB制作) )





关于JLCPCB
JLCPCB(深圳市佳力创电子科技发展有限公司)是中国最大的PCB原型企业,是一家专业从事快速PCB的高科技制造商原型和小批量PCB生产。凭借在PCB制造领域超过10年的经验,JLCPCB在国内外拥有超过20万客户,每天有超过8,000个PCB原型和少量PCB生产的在线订单。年生产能力为200,000平方米。适用于各种1层,2层或多层PCB。 JLC是一家专业的PCB制造商,具有规模大,设备精良,管理严格,质量上乘的特点。
谈论电子产品
制作电路图后,我将其转换为PCB设计,制作出“见图5,6,7,8”,以制作PCB,我选择JLCPCB作为最好的PCB供应商和最便宜的PCB供应商来订购我的电路。使用它们可靠的平台所有我需要做的是点击上传gerber文件并设置一些参数,如PCB厚度颜色和数量,然后我只花了2美元才能在5天后获得我的PCB。因为它显示了相关方案的“图1,2,3,4”。
相关下载文件
您可以从此处获取Circuit(PDF)文件。正如您在上面的图片中看到的那样,PCB制造得非常好,并且我已经为我们的主板制作了相同的PCB设计,所有标签和徽标都可以在焊接步骤中为我提供指导。如果您想订购相同的电路设计,也可以从此处下载此电路的Gerber文件。
步骤5:为您的机器设计支持!


为了给我们的机器带来更好的外观,我决定使用 Solidworks软件设计这三个部分“见图1”,这些部件将帮助我们将DVD阅读器组装在一起,我已经获得了这些部件的DXF文件,并且在我的朋友的帮助下 FabLab Tunisia 我已经有了设计的零件生产使用数控激光切割机,我们使用5毫米MDF木材材料来生产这些零件。另一个设计是绘图笔架,我通过3D打印过程得到它。
第6步:成分

现在让我们回顾一下这个项目所需的必要组件,我正在使用上面提到的Arduino Nano ,它将是我们机器的核心。该项目还包括两个步进电机,带有驱动器IC和伺服电机。你会发现一些推荐的亚马逊链接用于相应的项目
为了创建这类项目我们需要:
我们从JLCPCB订购的PCB
Arduino nano
2 x L293D H桥驱动程序
2个IC插座DIP 16针
1 x IC插座DIP
SIL和螺丝头连接器
1 x伺服电机SG90
2 x DVD阅读器
3D打印部件
激光切割部件
用于装配的一些螺钉
我们从JLCPCB或任何其他产品获得的笔绘图笔
第7步:电子装配和测试





我们现在转向所有电子元件的焊接组件。像往常一样,您会在顶部丝绸层上找到每个组件的标签,表明它在板上的位置,这样您就可以100%确定不会出现任何焊接错误。
进行一些测试
焊接完电子元件后“看图1”,我把DVD读卡器拧到X轴板上,我对主板做了同样的事情,而不是把电机线放在它们的螺丝头上做一个简单的使用步进电机测试代码测试“见图2”。如您所见,步进器移动正常,我们在正确的路径上。
/************************************************************************************************************************************************************************
* - Author : BELKHIR Mohamed *
* - Profession : (Electrical Ingineer) MEGA DAS owner *
* - Main purpose : Industrial Application *
* - Copyright (c) holder : All rights reserved *
* - License : BSD 2-Clause License *
* - Date : 20/04/2017 *
* ***********************************************************************************************************************************************************************/
/*********************************** NOTE **************************************/
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions are met:
// * Redistributions of source code must retain the above copyright notice, this
// list of conditions and the following disclaimer.
// * Redistributions in binary form must reproduce the above copyright notice,
// this list of conditions and the following disclaimer in the documentation
// and/or other materials provided with the distribution.
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS “AS IS”
// AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
// IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE DISCLAIMED
/*
─▄▀▀▀▀▀▀▀▀▀▀▀▀▀▀▀▀▀▀▄
█░░░█░░░░░░░░░░▄▄░██░█
█░▀▀█▀▀░▄▀░▄▀░░▀▀░▄▄░█
█░░░▀░░░▄▄▄▄▄░░██░▀▀░█
─▀▄▄▄▄▄▀─────▀▄▄▄▄▄▄▀
*/
#include // Include the stepper Motor librarie
const int stepPerRotation = 20; // Number of steps by turn. Standard value for CD/DVD
// Indicate X axis stepper motor Pins
Stepper myStepperX(stepPerRotation, 8,9,10,11);
void setup()
{
myStepperX.setSpeed(100); // Stepper motor speed
myStepperX.step(100);
delay(1000);
myStepperX.step(-100);
delay(1000);
}
void loop() {}
步骤8:装配机械零件







我们通过拧紧继续组装我们的结构第二步进电机到Y轴平台“见图1”。准备好Y轴后,您将准备两个轴,以便在第一步“见图2”中创建我们谈到的双轴计划。您需要做的就是将两个轴放置在90°“见图3”中。
制作笔架
我们通过放置一把小斧头准备笔架进入弹簧以固定3D打印的笔架,然后我们将伺服电机拧到其位置“见图4”,笔架已准备就绪,因此我们使用一些热胶或任何其他方式将其粘贴到Y轴的托架上为了能够在步进电机步骤“看图5”后在Y轴上滑动,然后我们将我们的活动平台固定在X轴的支架上“见图6”,我们完成了发动机电线的拧紧他们在板上的连接器。经过一些安排后,我们的机械设计已准备就绪,可以进行操作‘见图7’。
步骤9:软件部分












移动到软件部分,我们将结合三个软件以使机器保持活动状态,我在下面做了一个简短的描述第一张图片,我们将使用Inkscape软件进行设计,生成我们机器所需的gcode文件,并且为了理解gcode指令,机器应该有自己的代码,我们将使用Arduino IDE软件上传,最后一个部分是如何将机器的代码链接到gcode文件,这是由处理软件执行的。
第一步是上传arduino board scketch,你可以从下面的链接下载,不要忘记根据您的光学更新步进电机引脚。
准备Gcode‘Inkscape’
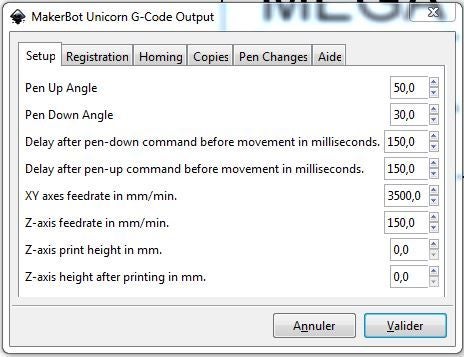
《然后我们转移到Inkscape,我们调整一些参数‘看图1’就像纸框和单位‘看图2’,我们准备我们的设计并保存在MakerBat unicon格式‘见图5,6’,如果这样您的Inkscape版本不提供格式,您可以放置一个附加组件,一旦您单击(保存),将出现一个新窗口以进行Gcode文件参数调整,您需要做的就是遵循相同的调整我们的一切都会很好,只需按照‘图片7,8,9’然后你这样设置这些参数,你就有了你的gCode文件。
注意:如果您使用的是高于0.48.5版本的Inkscape版本,则无法以所需格式保存Gcode文件
将机器链接到Gcode文件‘Processing 3’
转向处理软件,它有点像Arduino IDE‘见图10’所以你应该打开‘CNC程序’文件你可以从下面的链接下载并运行它‘见图11 ’,将出现第二个窗口,你需要按下键盘中的后一个来选择机器的COM端口‘见图12’,并且按后者g 选择所需的gcode文件,一旦选择,机器将直接开始绘图。
步骤10:测试和结果






这里我们正在进行一些测试,一旦上传了Gcode文件机器开始绘图,我真的很喜欢LED闪烁,显示发送到e的序列ach步进电机。
这些设计做得非常好,你可以看到这个项目很棒,也很容易制作,
- 相关推荐
-
DIY一个能在布料上压印电路的绘图仪2015-11-26 0
-
怎样使用Arduino去构建一种绘图仪呢2022-01-17 0
-
利用Arduino平台把废旧DVD光驱改成CNC绘图仪2019-05-24 6686
-
如何制作基于arduino的微型CNC绘图仪机器2020-05-14 7773
-
mXY板-低预算XY绘图仪绘图机器人板2022-07-01 440
-
数控笔式绘图仪开源分享2022-10-19 275
-
如何使用DVD驱动器L293D制作迷你CNC 2D绘图仪2022-11-01 361
-
基于Arduino的Mini CNC 2D绘图仪2022-11-04 330
-
构建低成本Arduino Mini CNC绘图仪2022-11-17 432
-
绘图仪开源项目2022-11-22 214
-
制作Arduino XY绘图仪绘图机器人极谱仪2022-11-29 453
-
基于Arduino的迷你CNC 2D绘图仪2022-12-20 256
-
构建一个简单的基于Arduino的CNC绘图仪2022-12-29 3743
-
基于Arduino迷你CNC 2D绘图仪2023-06-26 173
-
FPV天线波束绘图仪构架2023-07-11 124
全部0条评论

快来发表一下你的评论吧 !
