

微型四轴飞行器DIY图解
电子说
描述
第1步:零件清单

您需要以下部件:
- 飞行控制器:我使用的是Matek F411-mini。您可以使用任何所需的飞行控制器。请记住,对于WifiPPM,您需要至少300mA的3V电压,对于3D相机,需要至少500mA的5V电压。
- 15A ESC
- 4 x 1104无刷电机
- 2435用于90mm机架的4个叶片螺旋桨,用于82mm机架的2030个3叶片螺旋桨或用于109mm机架的3020个2叶片螺旋桨
- WIFIPPM或任何其他接收器(与instructable不同我现在使用带有外置天线的ESP07)
- 用于Android的Lowcost 3d FPV摄像头(我添加了新的3D打印凸轮架和VTX支架)
- GY63 Baro if你想添加高度保持模式(在我的构建中从未令人满意)
- 如果您想使用它,请使用小蜂鸣器。我用它作为电池警告。
- 2S电池。我使用的是1000mAh LiPo。
- 电池连接器
- 一些小塑料垫片,螺母和螺丝
- 来自ebay的长20mm M2塑料吸头
- 3D打印框架,支撑杆和支架
- 用于固定电池的一些橡胶带
步骤2:打印框架和支柱警卫
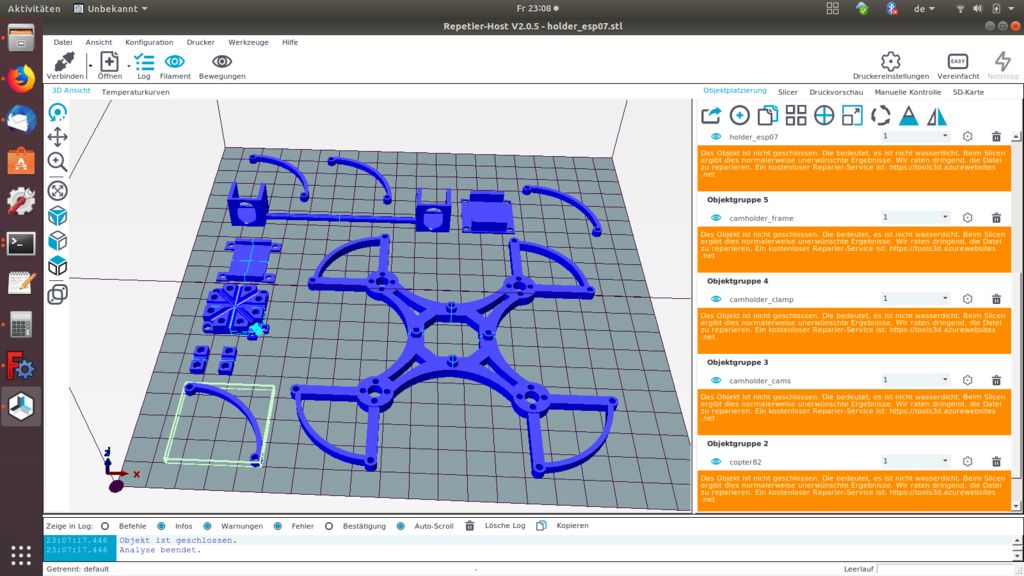
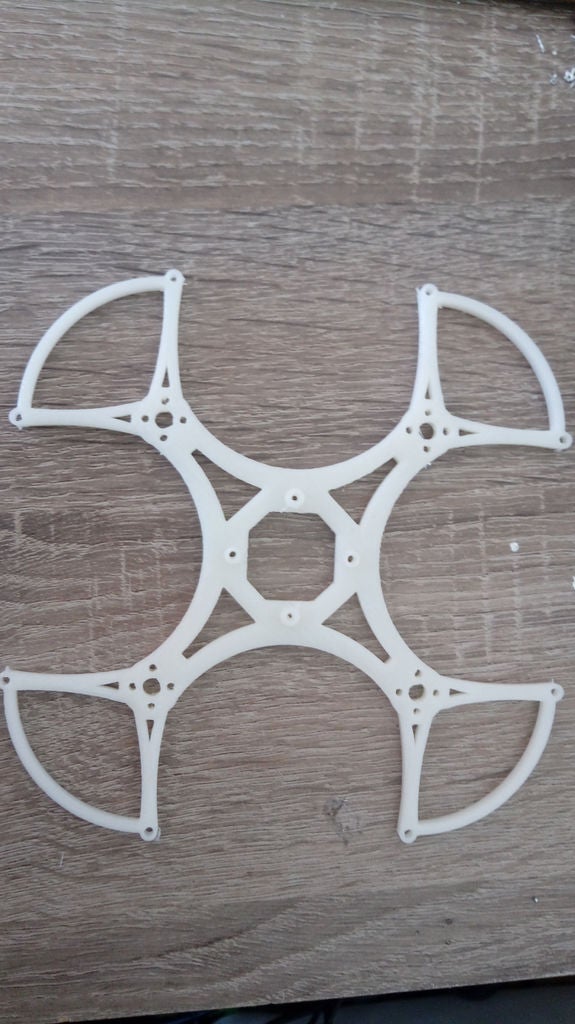
第一步是所有部分。我使用PLA配有0.3mm喷嘴和50%填充物。
我添加了三种不同的框架尺寸。 82毫米的框架非常小,但飞行时间只有3分钟左右,推力几乎太低。 90毫米的框架是飞行时间和尺寸之间的最佳折衷。飞行时间约为5分钟。推力还可以。 109毫米的机架具有最佳的飞行时间(约7分钟)和最佳推力,但缺点是尺寸。
我还为3D摄像机增加了一个新的凸轮架,还为VTX和ESP8266增加了一些支架。 。
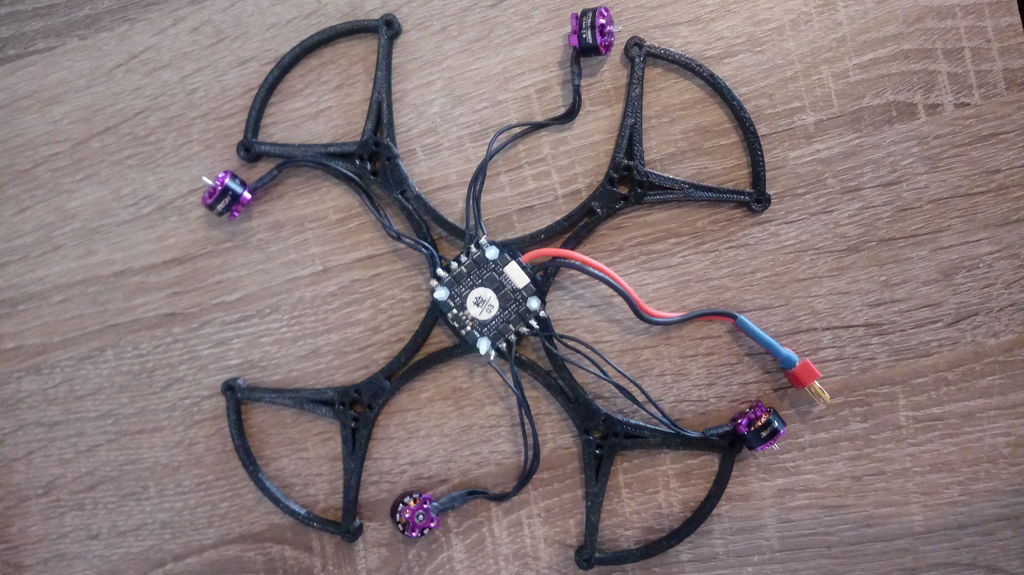
步骤3:添加ESC和电机


在您继续之前,您应该已经完成了“WIFIPPM”和“适用于Android的低成本3D FPV摄像机”。
将所有四个电机添加到框架中。然后将ESC添加到框架中。使用M2x20塑料螺丝和M2螺母。现在将电机连接到ESC,如第一张和第二张图片所示。电机的方向将在稍后调整。将电源插头添加到ESC的电源线,如第三张图所示。
步骤4:将电子设备添加到飞行控制器
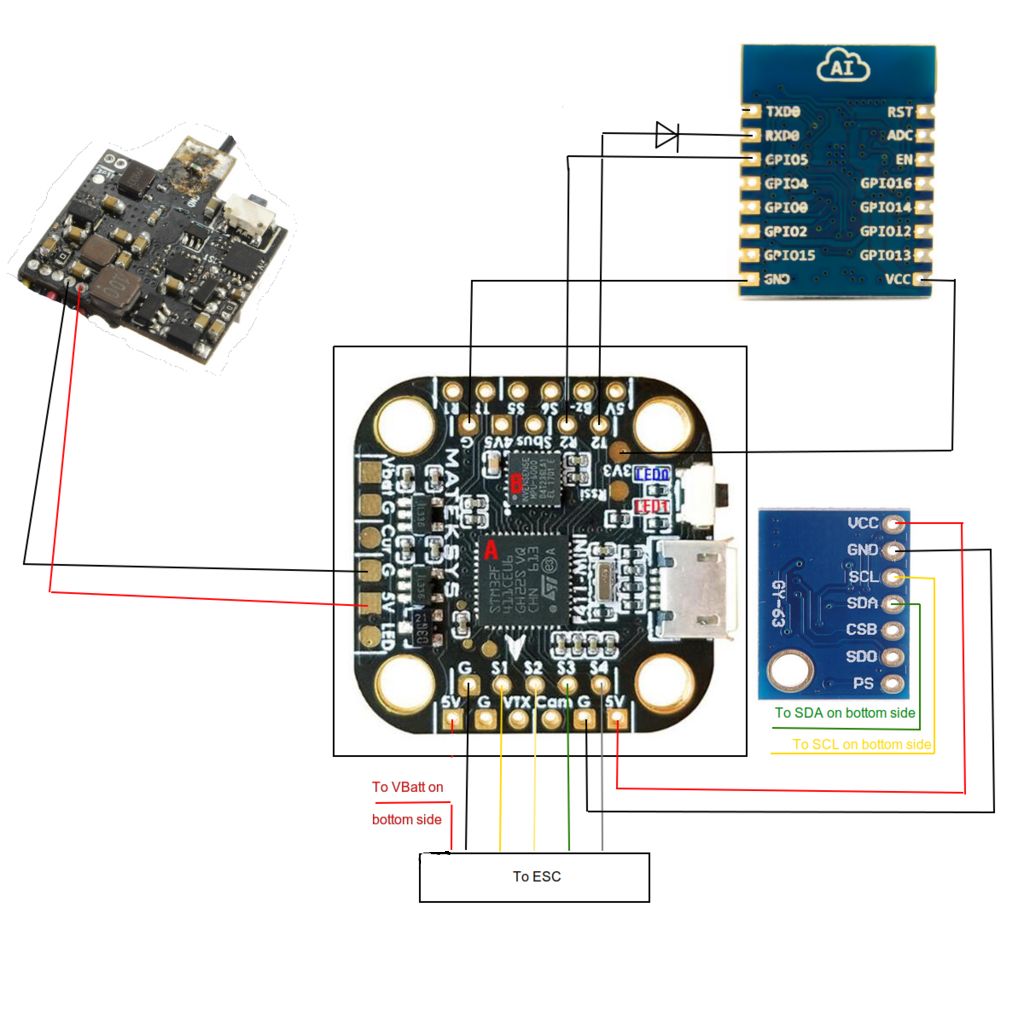
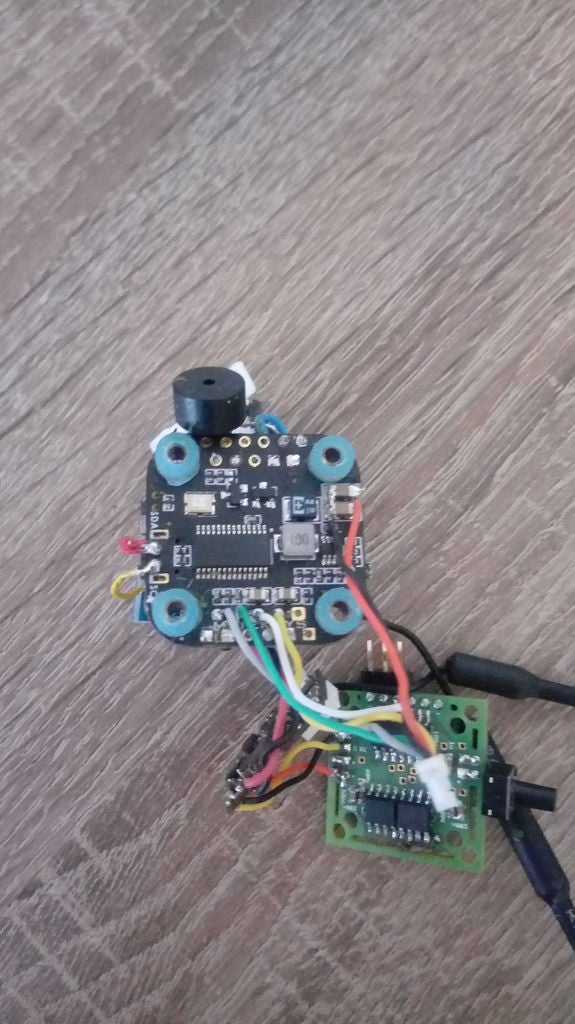

现在将ESC电缆焊接到飞行控制器上。 USB插头应位于连接的另一侧。您可以在第一张图片中看到连接。
S1 - 》黄色S2 - 》白色S3 - 》绿色S4 - 》灰色G - 》黑色VBAT - 》红色我将VBAT和GND连接到电容器,因为连接焊盘位于另一侧。
将硅和黄铜垫圈添加到飞行控制器。
如果要使用它,请添加baro。 SDA和SCL也位于电路板的底部。 + 5V和GND位于顶部。
现在连接WifiPPM。将PPM输出连接到飞行控制器的RX2。将WIFIPPM的+ +连接到3.3V,GND连接到G.我还在飞行控制器的TX上添加了一个二极管到ESP8266的RX,因为我现在用后向通道和MSP协议进行了一些测试。您不需要这个。
使用VTX添加3d摄像头并将+连接到+ 5V并将GND连接到G.
如果您使用蜂鸣器也将其添加到蜂鸣器
现在你把所有的电子设备放在一起。
第五步:把所有东西放在一起

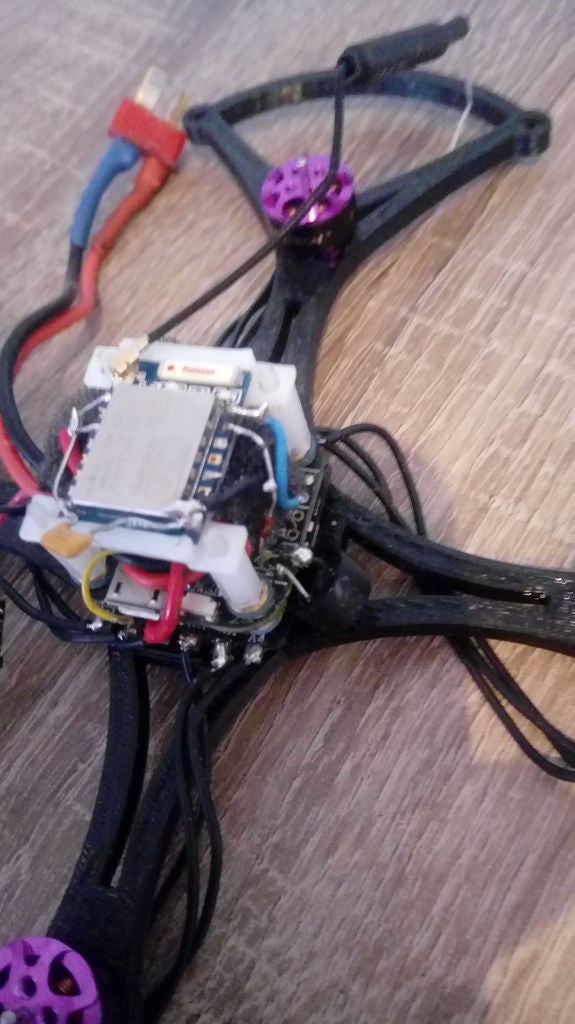


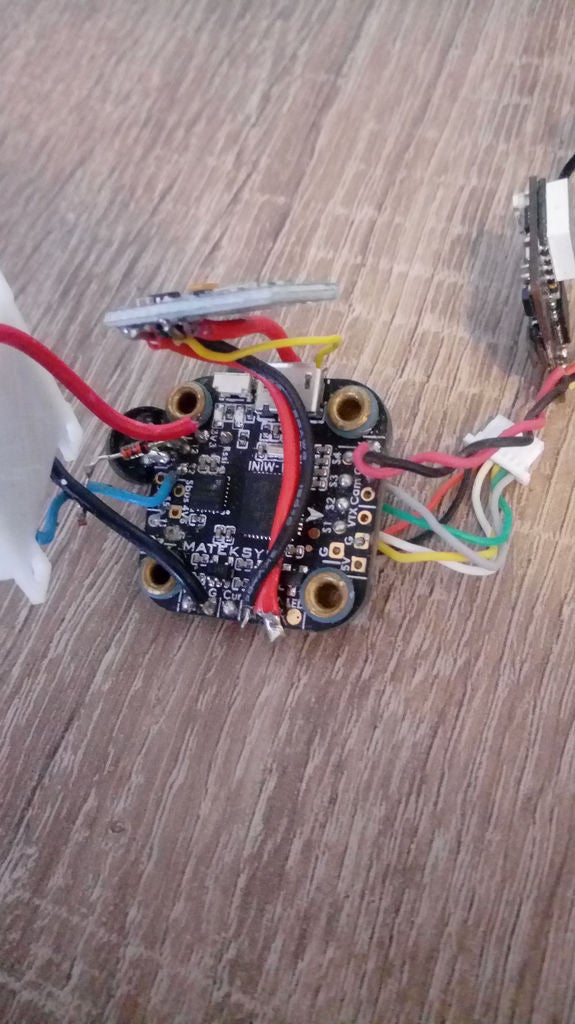
将电缆连接到ESC插头,并将飞行控制器放在ESC顶部。前箭头应指向ESC插头的方向。放一些较长的垫片来固定飞行控制器。如果您不使用baro,可以使用短垫片。 (第一张图片)
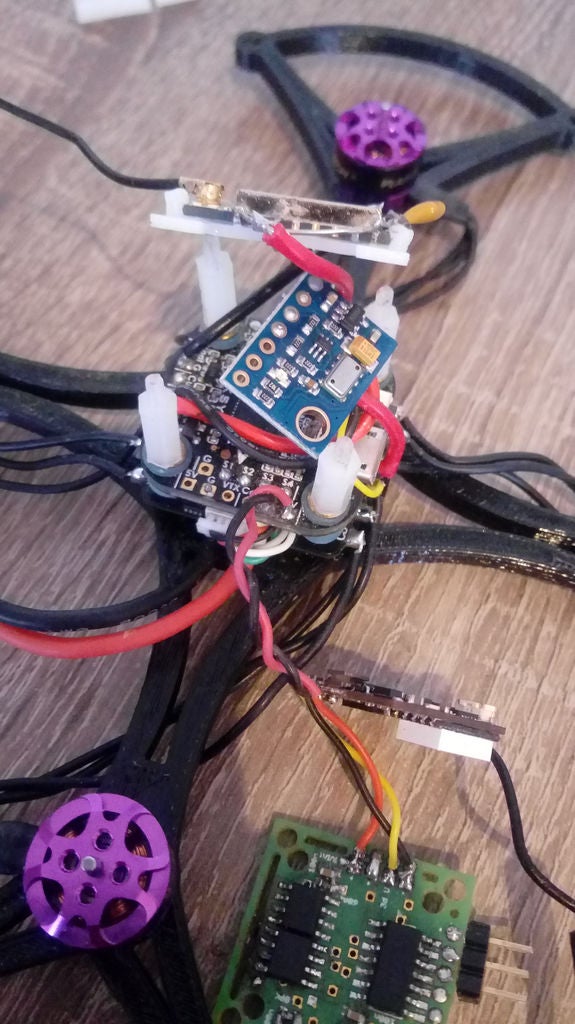
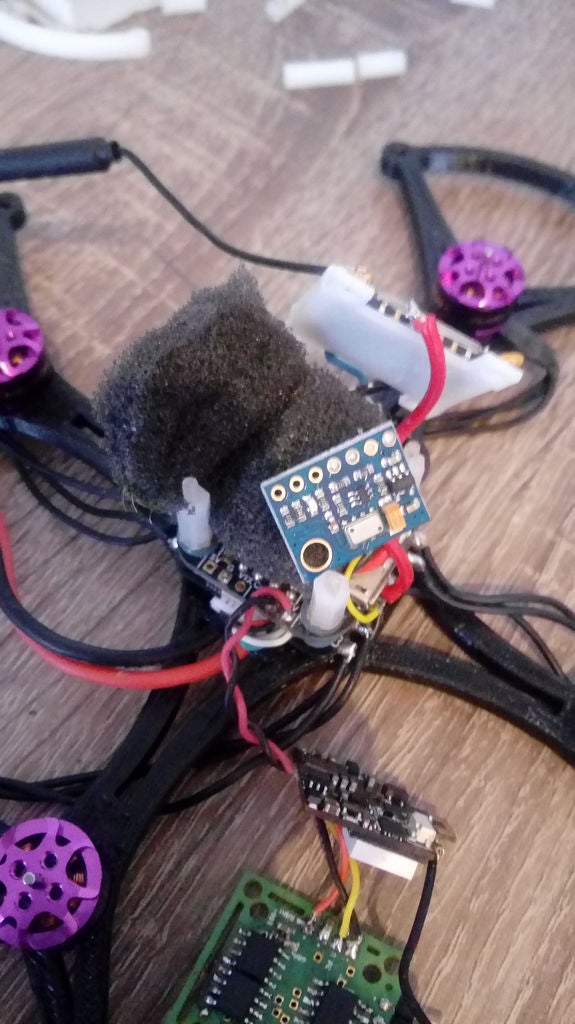
现在在baro周围放一些泡沫以消除空气流动。把baro放在ESC的顶部。它没有用任何螺钉固定。它只是由泡沫和它顶部的支架固定。 (第二张和第三张图片)
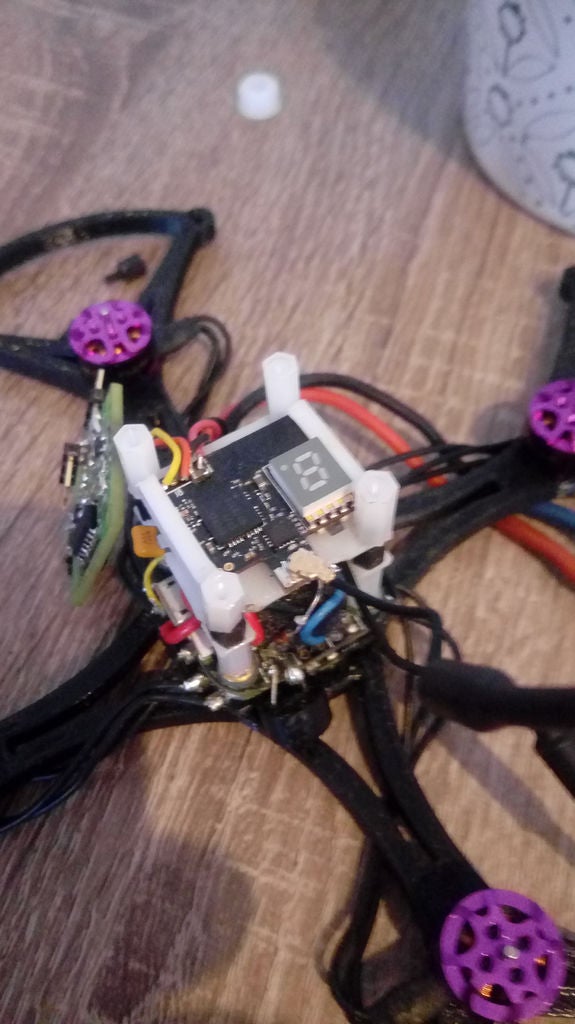
然后将ESP8266放入其印刷支架并将其放在上面。用一些短的垫片修复它。你也可以添加一个外置天线以获得更好的射程。(第四张图片)
在它的顶部放上VTX和它的印刷支架,再放一些长的垫片。 (第五张图片)
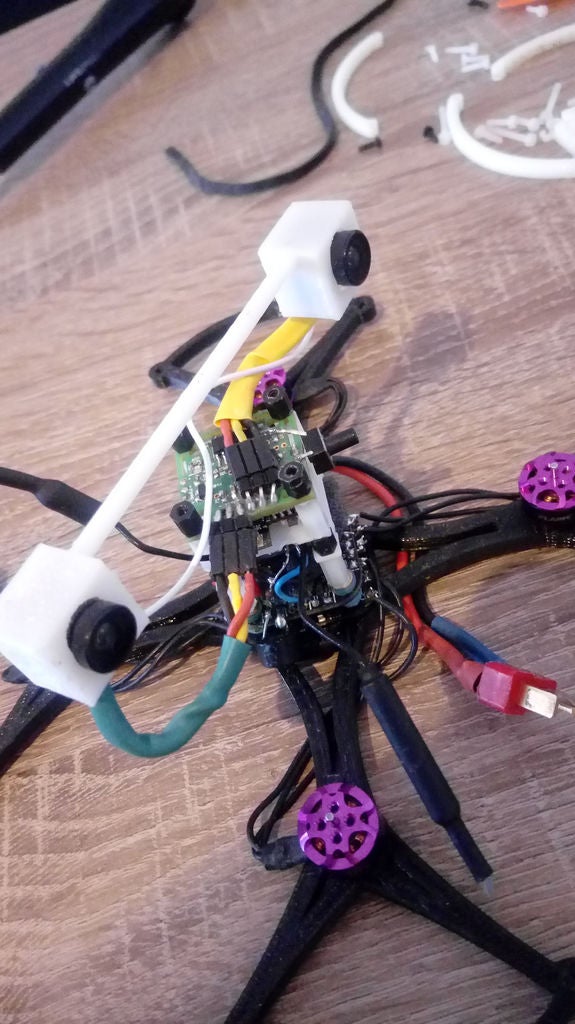
现在将三维凸轮的电路板放在上面并再放一些短垫片。 (第六张和第七张图片)
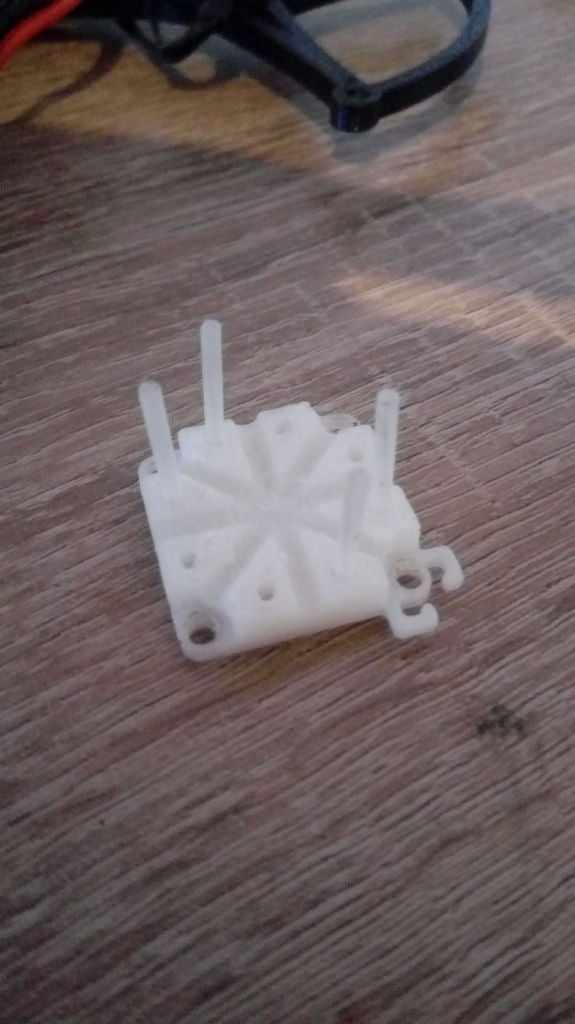
最后一张是3d打印的凸轮盘。首先放入一些长螺钉,如第八张图片,然后将其固定在顶部并用凸轮架固定两个摄像机。
现在你的直升机差不多完成了。我们进行调整。
步骤6:配置Betaflight

现在是时候进行配置了。如果您尚未安装betaflight配置程序,请从此处下载并安装它。 Fore Baro模式您必须安装并清除Cleanflight。 Betaflight不支持它。
通过USB将飞行控制器连接到计算机并启动betaflight配置器。点击连接。
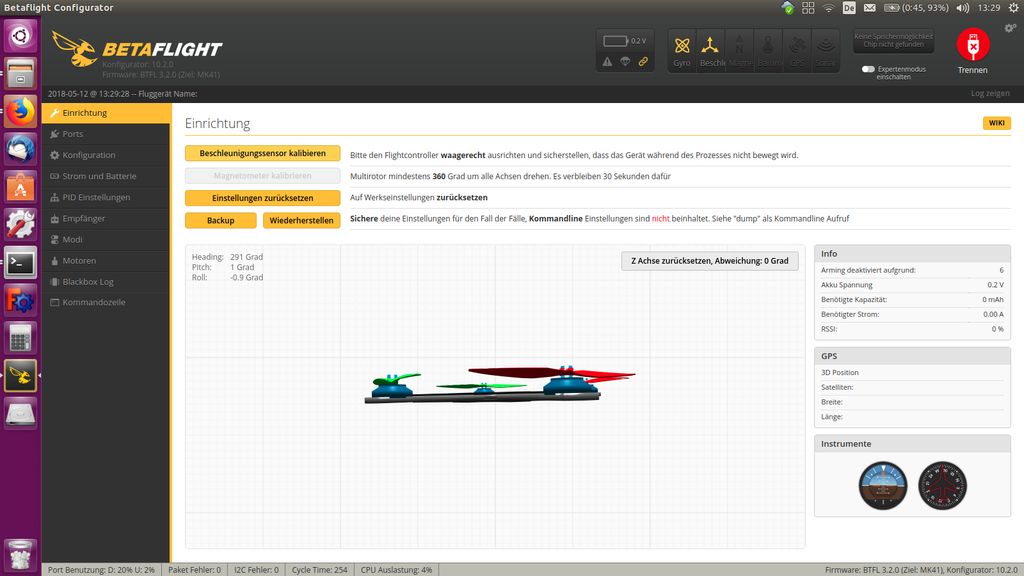
在第一个标签中,您可以调整传感器。要执行此操作,请调平直升机并单击校准。
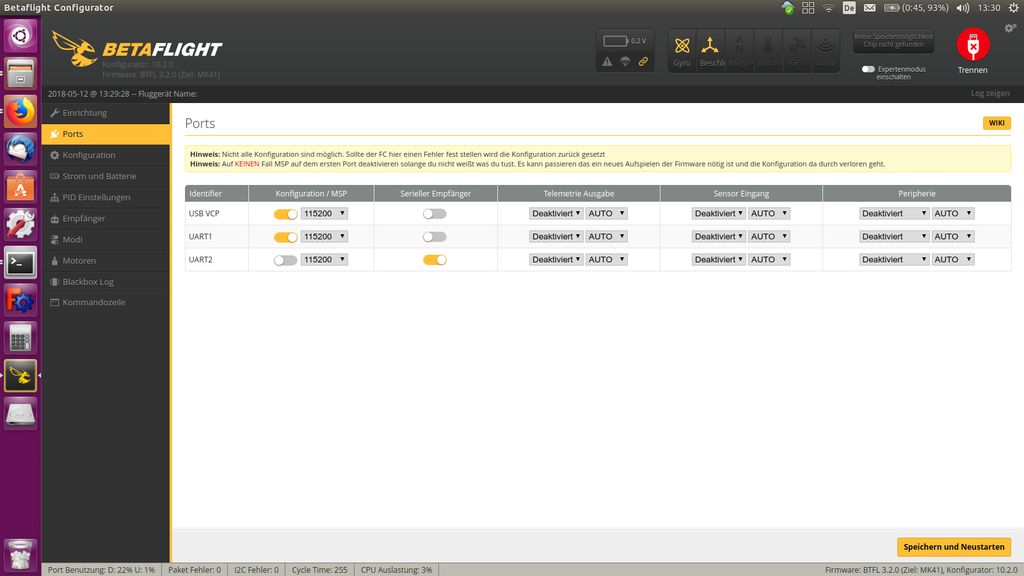
在第二个选项卡中,您可以配置串行端口。保持USB端口不变。将UART2设置为串行接收器。你可以像现在这样离开UART1。我把它调整为MSP,因为我现在正在使用MSP协议进行一些测试。
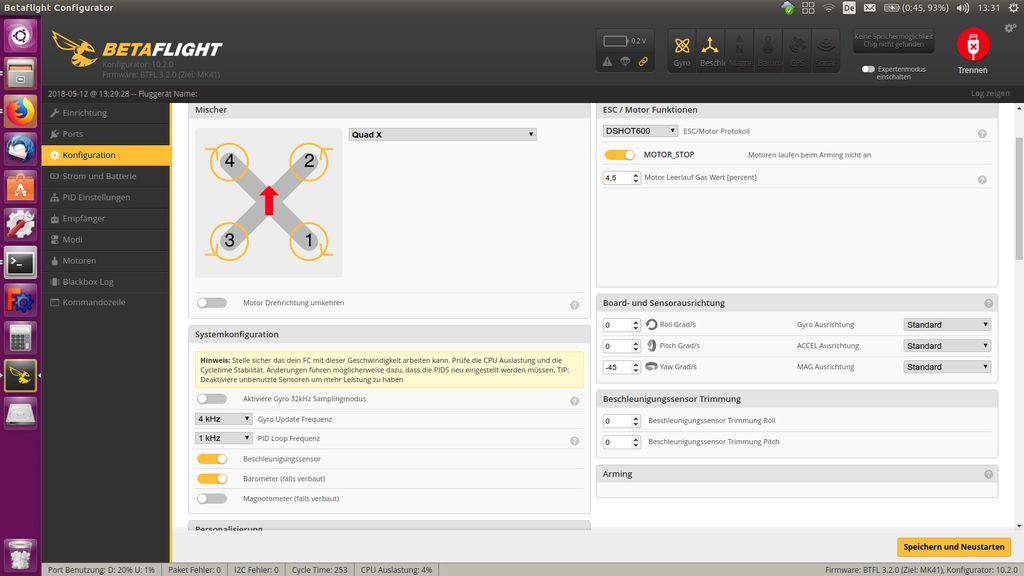
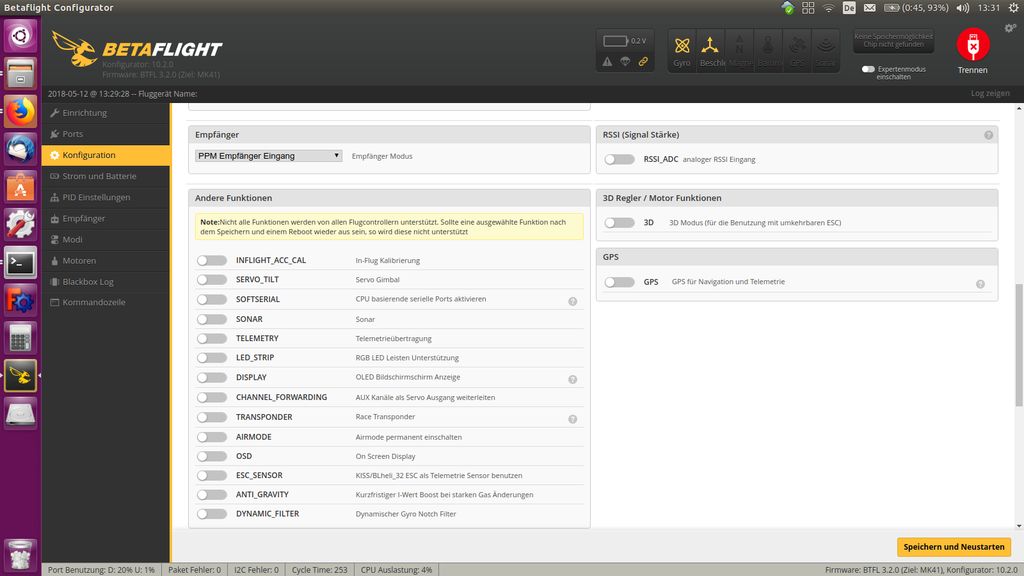
在下一个选项卡中,您可以配置直升机。把它放到Quad X和DShot600上。我总是打开电机停止,因为我希望在没有油门的情况下关闭电机。您还必须将电路板方向调整为YAW -45°。接收器必须调整到PPM接收器。您可以保留其余部分。
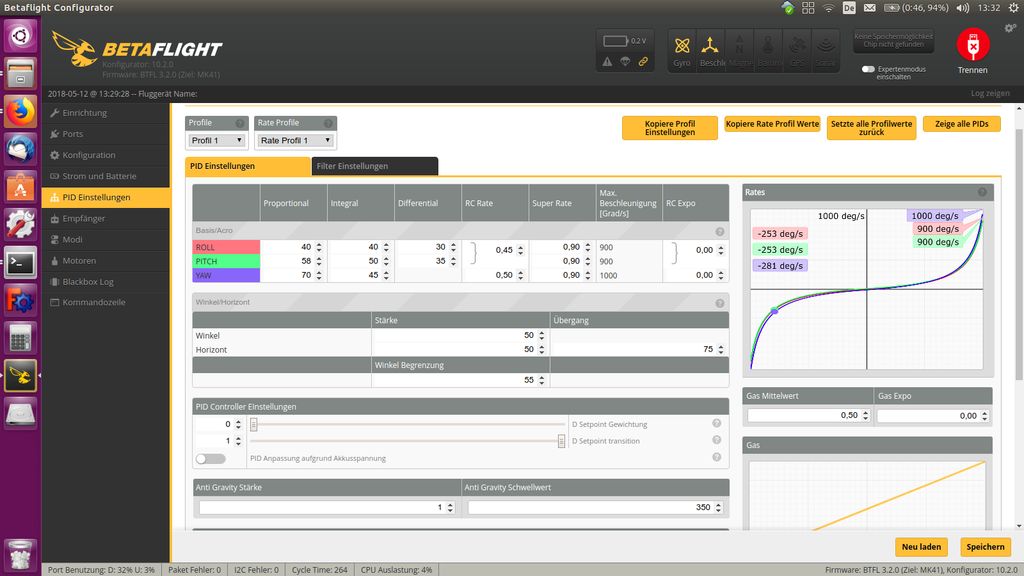
在PID选项卡中,您可以调整PID参数和杆的灵敏度。我稍微降低了灵敏度。 PID调整应适用于第一次飞行。您可以稍后对其进行优化。
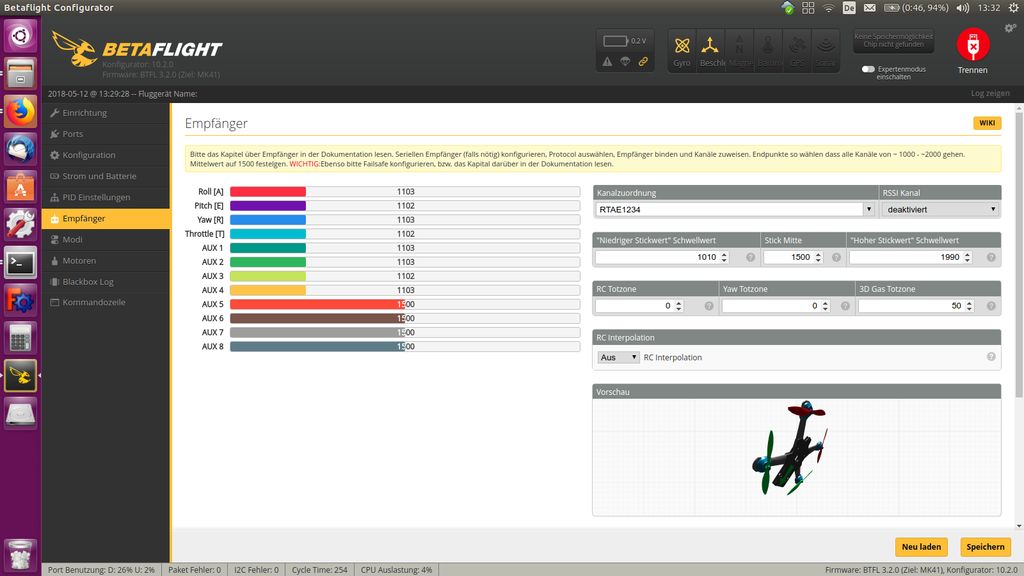
下一个选项卡是接收器选项卡。将通道映射调整为RTAE1234。将最低粘贴值调整为1010,将中心粘贴值调整为1500,将最高粘贴值调整为1990.如果您将智能手机连接到WIFIPPM并在浏览器中加载地址192.168.4.1,则可以测试您的接收器。
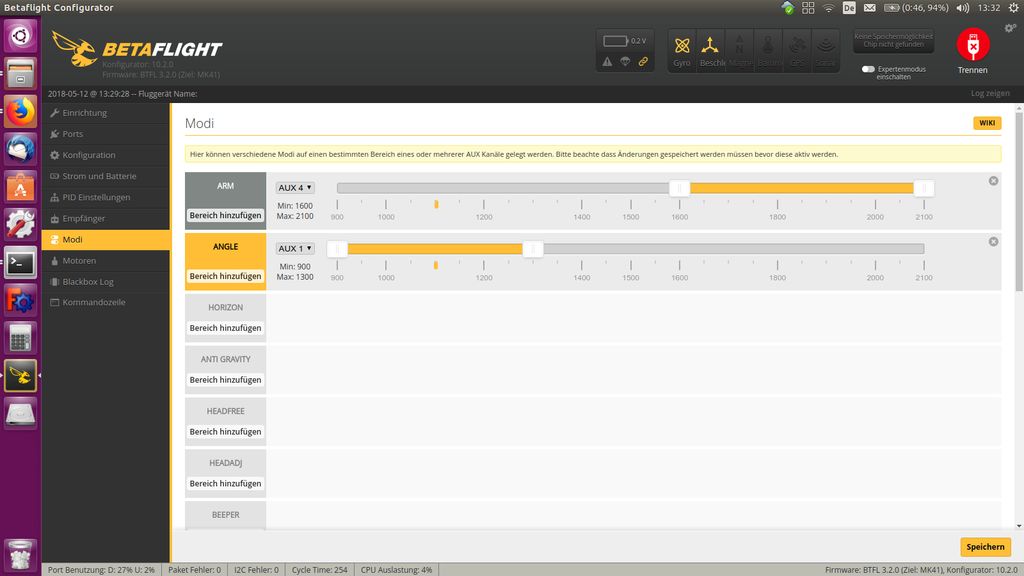
如果接收器工作正常,您可以进入“模式”选项卡。我已经在AUX4和AUX1上的飞行模式下布防了。我还在AUX3上调整了Baro模式(只有清洁飞行,必须连接电池才能识别baro传感器)
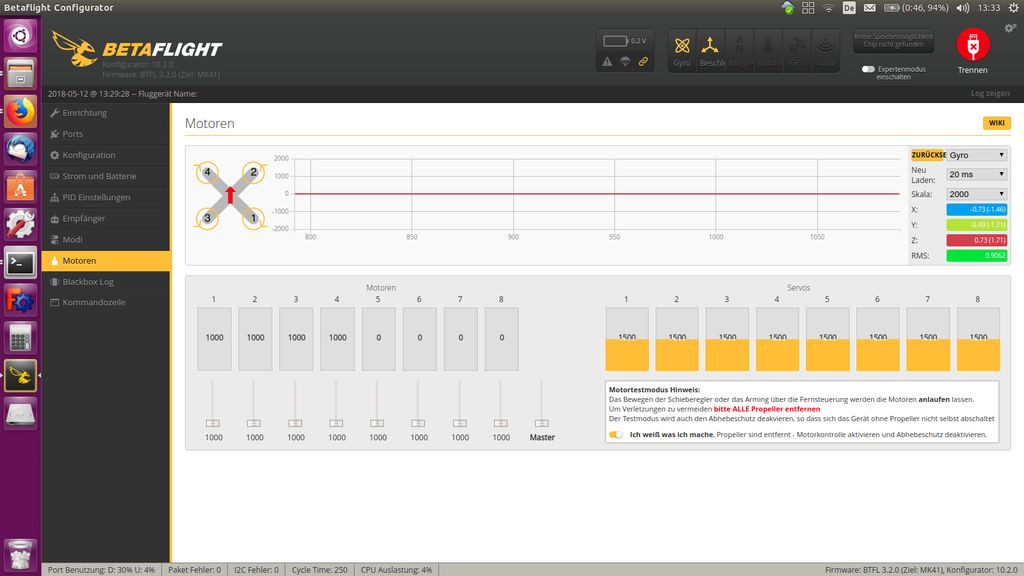
现在转到电机选项卡。插上电池并点击“我知道我在做什么”。测试电机的方向。它应该像左上角的图表一样。如果电机方向错误,请拔下电池插头,断开USB电缆并更换电机的两根电线。然后再试一次。当电机方向正常时,配置完成。
步骤7:测试你的直升机

现在你可以添加螺旋桨,橡胶带,以保持电池和支柱防护。再次仔细检查所有内容并连接电池。连接到WIFIPPM并尝试先飞行而不使用FPV。然后再次检查视频流是否正在使用电机。如果您有电机的视频失真,请再次检查接线。尝试将3d fpv相机的所有电线尽可能远离电源线。当一切正常时,你可以开始FPV飞行。
- 相关推荐
- 四轴飞行器
-
关于四轴飞行器的发展2012-07-27 0
-
微型四轴飞行器2013-10-10 0
-
DIY四轴飞行器如何入门?2014-07-23 0
-
四轴飞行器DIY攻略大集合2015-04-09 0
-
【GoKit申请】+基于GoKit云平台的微型四轴飞行器设计2015-05-08 0
-
【GoKit申请】基于GoKit的微型四轴飞行器设计2015-09-22 0
-
四轴飞行器DIY分享2016-01-05 0
-
四轴飞行器的结构原理2016-01-15 0
-
求微型四轴飞行器的教程2016-04-19 0
-
坛友经验分享之基于STM32的微型开源四轴飞行器2018-09-05 0
-
四旋翼飞行器结构和原理+四轴飞行diy全套入门教程2019-01-14 0
-
【第7期】每周精选之四轴飞行器设计资料汇总2019-06-14 0
-
四轴飞行器原理图分享2020-11-21 0
-
四轴飞行器的硬件2021-09-13 0
-
四轴飞行器的电机有哪些?2023-11-06 0
全部0条评论

快来发表一下你的评论吧 !
