

可控四足机器人的制作教程
电子说
描述
步骤1:准备框架

使用材料支撑打印它,如脚,臀部和大腿
印刷部件清单:
1x基体
1x盖子
1x电池座
4x臀部(A型和B型)
4x Thight(A型和B型)
4x脚(A型和B型)
4x Shield
12x衬套+ 12x 2mm螺钉
步骤2:组装机器人框架
按照上面的步骤视频组装框架,螺钉用于2mm尺寸的孔
步骤3:电子零件(Wemos D1 Mini)
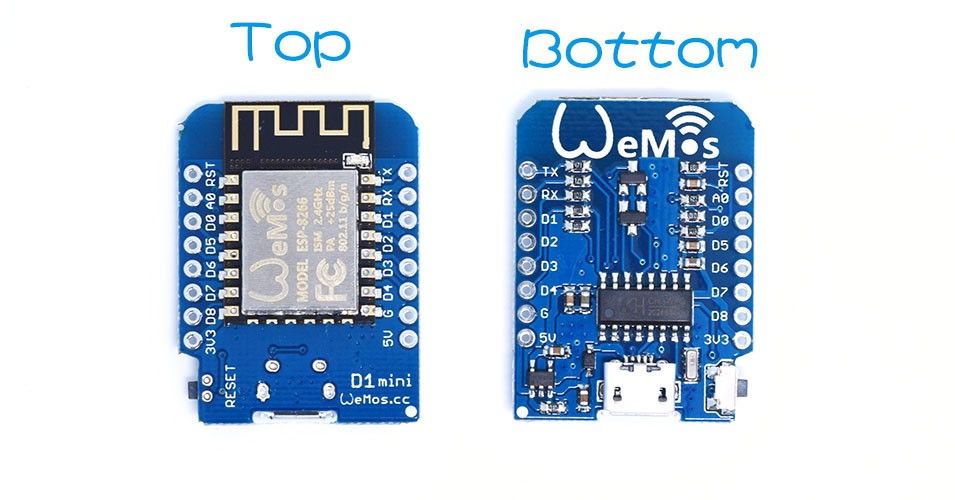
有市场上有很多NodeMCU变体并且基本上具有相同的功能,对于这个项目我选择Wemos D1 Mini。
这部分将作为我们的四足动物作为接入点的Web服务器。
您需要的只是连接到Quadruped AP并控制机器人的所有运动,也许对于未来的项目,它将显示您需要的所有传感器仪表板。..。..
这个D1 mini ,是一款基于ESP-8266EX的迷你WIFI板。它有11个数字输入/输出引脚,所有引脚都支持中断/pwm/I2C/单线(D0除外)1个模拟输入(3.3V最大输入)a Micro USB连接
如何入门:
从Arduino网站安装Arduino 1.6.7。
启动Arduino并打开“首选项”窗口。
到Additional Boards Manager URL字段中。您可以添加多个URL,用逗号分隔。
打开工具→电路板:xxx→电路板管理器并安装ESP8266社区的esp8266(安装后不要忘记从工具》电路板菜单中选择ESP8266电路板)。
有关详细信息,请查看上面的视频
点击此处在Aliexpress中搜索
对于这个项目,您只需连接此引脚:
NodeMCU RX引脚连接到Arduino Nano TX引脚
NodeMCU TX引脚连接到Arduino Nano RX引脚
NodeMCU G引脚连接到DC-DC mini 5v Stepdown( - )输出引脚输出
NodeMCU5V引脚连接到DC-DC mini 5v Stepdown(+)输出引脚输出
PS: 对于编程此板,必须断开连接到arduino的所有引脚和DC-DC降压,否则你将收到错误。..。..
步骤4:电子零件(Arduino Nano)

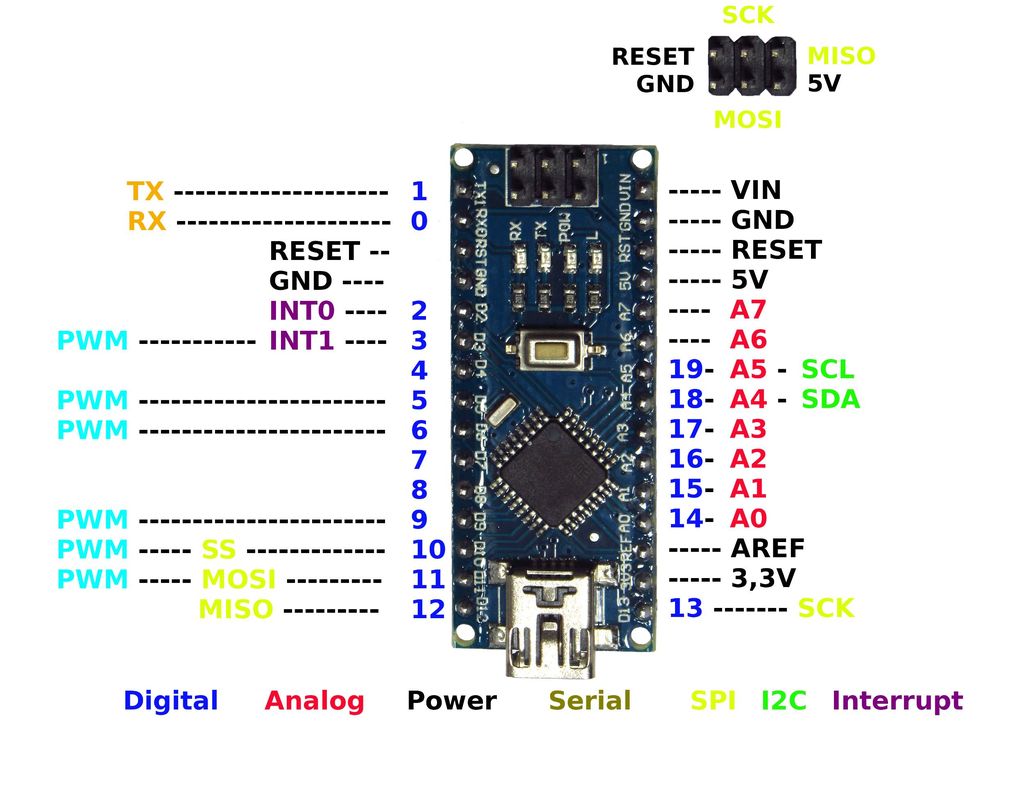
与NodeMCU相同,对于arduino板,你可以使用任何适合你的板,如Arduino Pro Mini,Arduino Nano或其他。
但是对于这个项目,我选择Arduino Nano,因为我不需要使用太多的针,它很小,不需要FTDI来编程。
点击这里在Aliexpress中搜索
对于这个项目,我只是使用:
Arduino nano RX引脚连接到NodeMCU TX引脚
Arduino nano TX引脚连接到NodeMCU RX引脚
Ardiono nano A4引脚连接到PCA9685 SDA引脚
Arduino nano A5引脚连接到PCA9685 SCL引脚
Arduino nano GND引脚连接到DC-DC mini 5v Stepdown( - )输出引脚输出
Arduino nano 5V引脚连接到DC-DC mini 5v Stepdown(+)输出引脚输出
参见上面的架构更多细节
PS:对于编程此板,您必须断开连接到NodeMCU的所有引脚和DC-DC降压,否则您将收到错误。..
步骤5:电子零件(Tower Pro 9g Micro Servo)

这是最受欢迎的迷你伺服。仅重9克,给你1.5公斤/厘米的扭矩。它的大小非常强大。适用于梁式机器人。
PS:此伺服只能旋转180度角
主要特点:
•半透明体
•轻量级
•噪音更低规格:
•尺寸:22.6 x 21.8 x 11.4 mm
•连接器导线长度:150 mm
•工作速度(4.8 V无负载):0.12 sec/60°
•失速扭矩(4.8 V):1.98 kg/cm
•温度范围:30至60°C(-22至140℉)
•死区宽度:4 usec
•工作电压:3.5 - 8.4 V
点击此处在Aliexpress中搜索SG90伺服
步骤6:电子部件(16通道12位PWM/伺服驱动器 - I2C接口 - 用于Arduino的PCA9685)
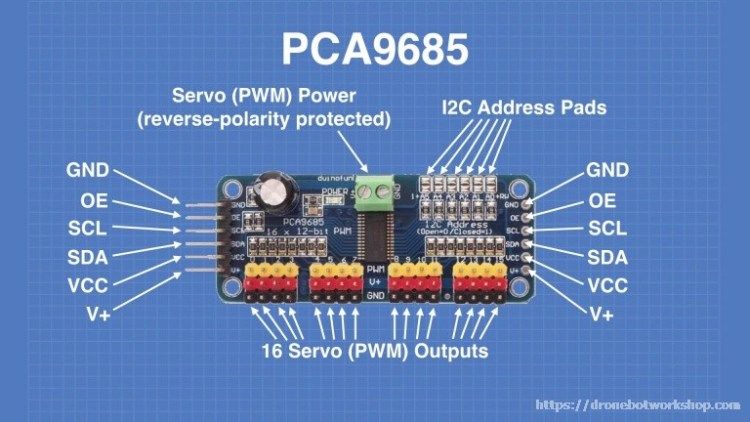
想要制作机器人助行器吗?但只使用微控制器的PWM输出数量有限,你会发现自己用完了!不适用于Adafruit 16通道12位PWM/伺服驱动器 - I2C接口。通过这种pwm和伺服驱动器突破,您可以通过两个引脚控制16个自由运行的PWM输出!需要运行超过16个PWM输出?没问题。将这些美女中的62个连接起来,最高可达992个PWM输出。
该板/芯片使用0x60-0x80之间的I2C 7位地址,可通过跳线选择
用于电源输入的端子块(或者可以使用侧面的0.1“突破)端子块上的反极性保护输入绿色电源良好的LED 3针连接器,每组4个,这样您就可以同时插入16个伺服电机(伺服插头略大于0.1“,因此您只能在0.1”标头“堆叠”上相互堆叠4个“链式”设计在V +线上放置一个大电容的地方(如果需要的话)在所有输出线上设置220欧姆串联电阻以保护它们,并使驱动LED琐碎的焊接跳线用于6个地址选择引脚i2c控制的PWM具有内置时钟的驱动器。与TLC5940系列不同,您无需连续发送信号来占用您的微控制器,它完全自由运行!它符合5V标准,这意味着您可以通过3.3V微控制器控制它并仍然安全驱动高达6V的输出(当你想要控制白色时,这很有用r具有3.4+正向电压的蓝色LED 6个地址选择引脚,因此您可以在单个i2c总线上连接其中的62个,总共992个输出 - 这是许多伺服或LED可调频率PWM高达约1.6 KHz 12每个输出的比特分辨率 - 对于伺服系统,这意味着在60Hz更新速率下大约4us分辨率可配置推挽或开漏输出输出使能引脚可以快速禁用所有输出。
单击此处进行搜索Aliexpress
在这个项目中,所有支路都需要12 CH(每支3CH),将此PCA9685引脚连接到Arduino Nano:
PCA9685 VCC连接到DC-DC迷你5v降压(+)输出引脚输出
PCA9685 GND至DC-DC迷你5v降压( - )输出引脚输出
PCA9685伺服(PWM)电源V +至UBEC(+ )输出引脚输出
PCA9685伺服(PWM)电源GND至UBEC( - )输出引脚输出
PCA9685 SDA引脚至arduino nano A4引脚
PCA9685 SCL引脚到arduino nano A5 pin
PCA9685 CH0 到 Fro nt Right Thight ,请将电缆颜色与PCA9685插座颜色(黄色,红色,棕色/黑色)匹配
PCA9685 CH1 至右前方脚,请将电缆颜色与PCA9685插座颜色(黄色,红色,棕色/黑色)匹配
PCA9685 CH2 至前右髋,请将电缆颜色与PCA9685插座颜色(黄色,红色,棕色/黑色)匹配
PCA9685 CH4 至右后方,请将电缆颜色与PCA9685插座颜色(黄色,红色,棕色/黑色)
PCA9685 CH5 匹配到后右脚,请将电缆颜色与PCA9685插座颜色(黄色,红色,棕色/黑色)
PCA9685 CH6 匹配到右后方臀部,请匹配电缆颜色为PCA9685插座颜色(黄色,红色,棕色/黑色)
PCA9685 CH8 至前左侧光线
PCA9685 CH9 至左前脚 ,请将电缆颜色与PCA9685插座颜色(黄色,红色,棕色/黑色)
PCA9685 CH10 匹配到左前方臀部,请将电缆颜色与PCA9685插座颜色(黄色,红色,棕色/黑色)
PCA9685 CH12 匹配到后左上方,请匹配电缆颜色为PCA9685插座颜色(黄色,红色,棕色/黑色)
PCA9685 CH13 至后左脚,请匹配电缆颜色至PCA9685插座颜色(黄色,红色,棕色/黑色)
PCA9685 CH14 至后左臀部,请将电缆颜色与PCA9685插座颜色(黄色,红色,棕色/黑色)
PS:有些PCA9685没有颜色代码插座,所以请确保黄色SG90伺服电缆连接到PWM数据引脚,红色电缆连接到V +引脚,黑色/棕色连接到GND引脚。
步骤7:PWM到伺服引脚连接
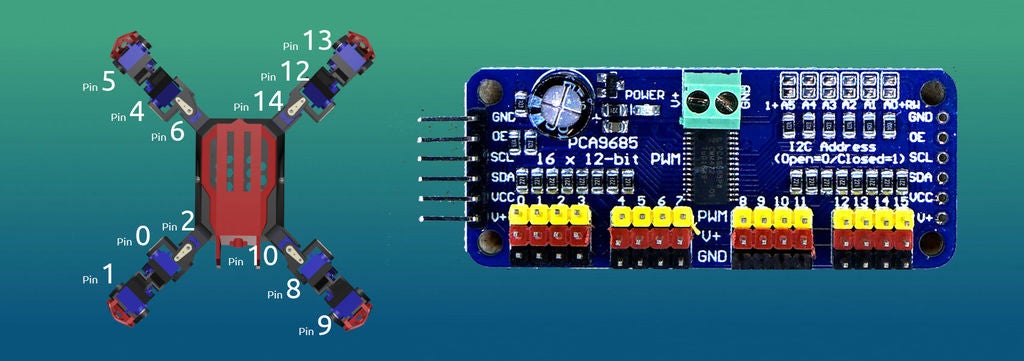
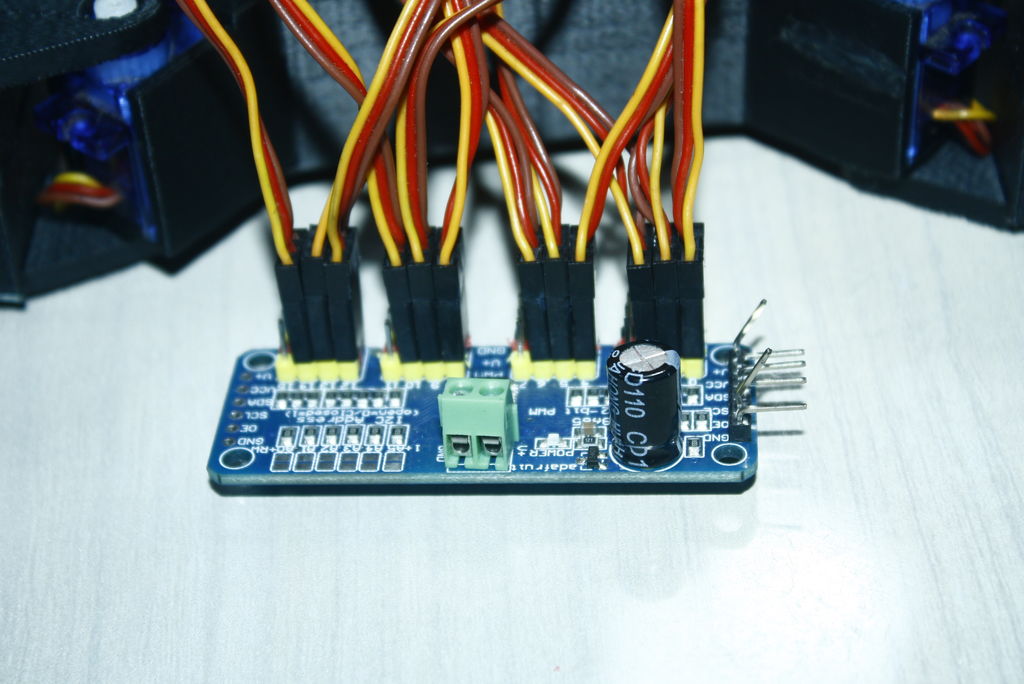
单击并放大上面的图片以查看引脚maping在PCA9685与舵机之间
PS:U仅使用16 CH中的12CH进行此项目,所以你仍然需要4CH进行扩展,比如放雷达伺服或者放一些nerf blaster武器。只需在arduino和NodeMCU中添加一个额外的代码
步骤8:电子零件(UBEC)

3A-UBEC是一款开关模式DC-DC灯调节器,配有2-6节锂电池组(或5-18节NiMh/NiCd电池),可为您输出一致的安全电压接收器,陀螺仪和伺服系统。它非常适合遥控直升机。与线性模式UBEC相比,开关模式UBEC的整体效率更高。
在这个项目中我们使用它为所有伺服电源供电,它具有滤波功能,因此可以降低噪声,从而影响电机故障,它具有高安培数,足以提升机器人负载。
点击此处在Aliexpress中搜索
引脚连接:
UBEC(+)RED输出引脚输出至PCA9685伺服(PWM)电源V +
UBEC( - )BLACK输出引脚输出至PCA9685伺服(PWM)电源GND
UBEC(+)RED输入至电池(+)引脚
UBEC( - )BLACK输入到开关引脚
步骤9:电子部件(DC-DC Mini Stepdown)
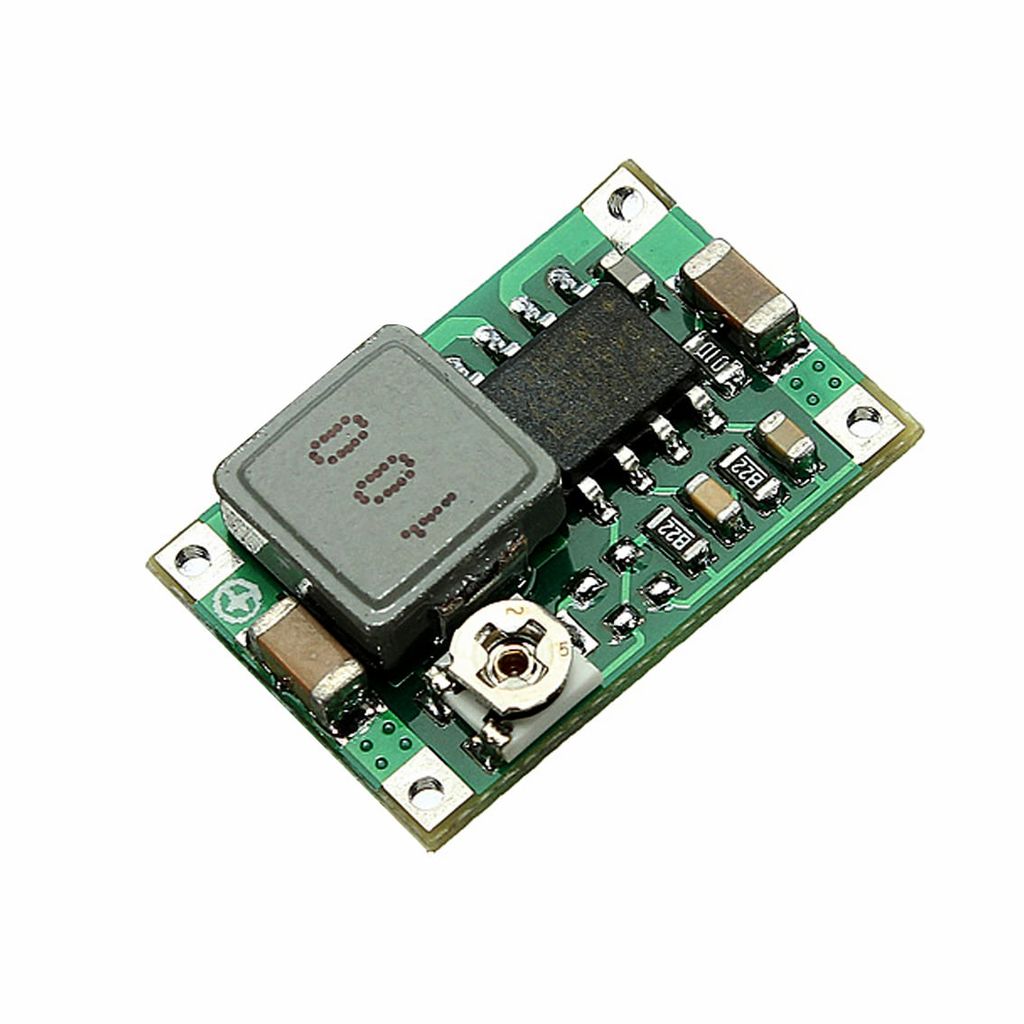

它与UBEC几乎具有相同的功能,但这只是简单的DC-DC降压模块。它有potensio仪表,我们可以将V(+)输出从1V调节到17V并且没有过滤。
点击这里在Aliexpress上搜索
PS:所以请记住,在使用之前,请使用直流电压表将V(+)调整为5V输出
引脚连接:
微型降压(+)IN至(+)电池
微型降压( - )IN至开关引脚
微型降压(+)OUT与NodeMCU(5V),Arduino nano(5V)和PCA9685(VCC)引脚
Mini stepdown( - )OUT与NodeMCU(G),Arduino nano(GND)和PCA9685(GND)引脚并联
步骤10:其他电子零件



您需要的是(20根或更少电缆)母对母跳线(Aliexpress跳线搜索)
自锁按钮开关或u可以使用其他类型的开关(Aliexpress自锁)切换搜索)
和一对从电池到开关的JST连接器和UBEC/DC-DC降压(Aliexpress JST连接器搜索)
步骤11 :电源
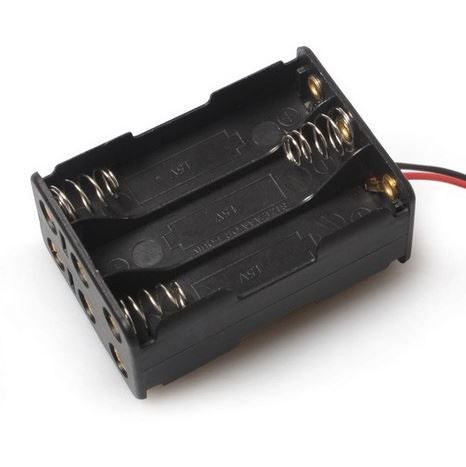

你可以使用很多电源,对我来说我更喜欢使用可充电的lipo 3S电池。它有11,1伏电流和500mAh或更大的容量(不太多,所以它可以更轻)。
但使用3S脂肪需要一个充电器,它不便宜,所以。..你可以使用其他像AAA电池这样的电源,你可以串口6节AAA电池,所以它可以产生大约9V的电源,我认为这个机器人有足够的电量。
点击此处在Aliexpress中搜索Lipo 3S电池
点击此处搜索Lipo Charger
点击这里在Aliexpress中搜索6xAAA电池座
步骤12:线图
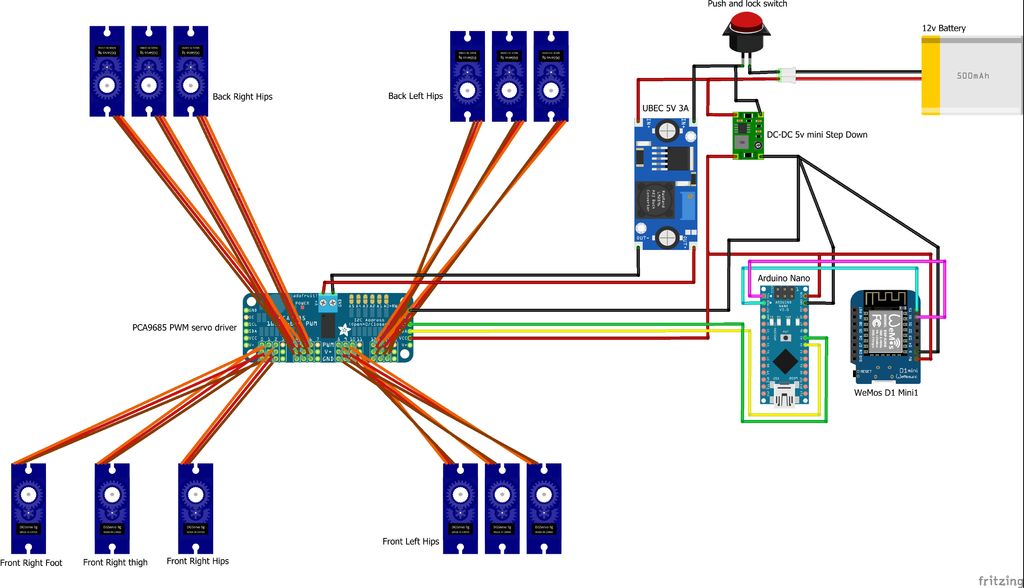
点击并放大上面的图片,查看该项目的所有线图
PS:你需要在某些部分进行一些焊接,并将橡胶头收缩以密封,以便在电源开关,UBEC和DC-DC降压之间进行连接。
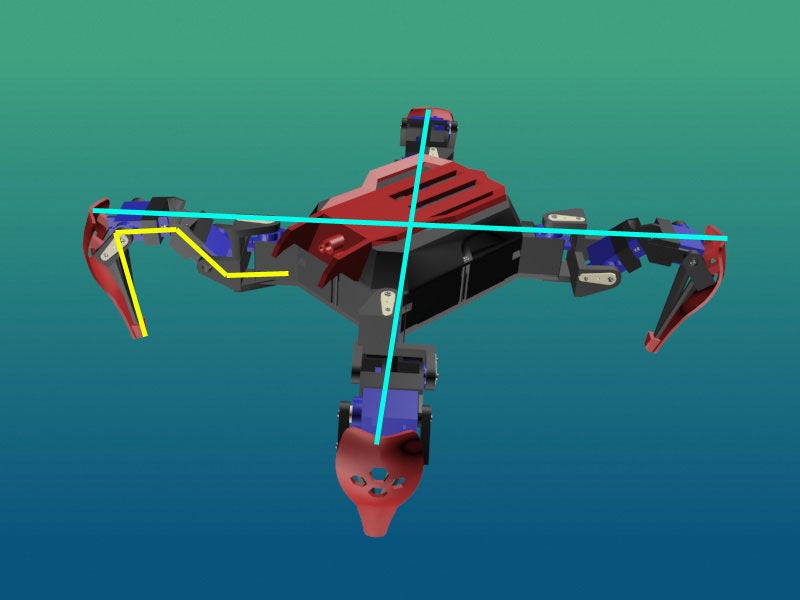
步骤13:编码和初始姿势
使用迷你USB连接arduino nano到USB端口电缆(但不要忘记将所有引脚断开连接到wemos D1 mini和DC-DC降压)并打开 “spider_driver_open_v3_ESP8266_Rev280918.ino” 并将其闪存到Arduino nano,但不要忘记选择arduino板到Arduino nano并选择正确的端口。
接下来是使用micro USB转USB将Wemos D1 mini连接到电脑(也不要忘记将所有引脚断开连接到DC-DC降压和Arduino nano)。然后打开 “ QuadrupetV2_310319_fix_connection_issue.ino ” 并将其闪存到主板上,但在此之前选择正确的电路板并选择正确的电路板(更多细节请回到第3步)
完成后你可以将所有引脚重新连接到arduino nano,wemos D1 mini和DC-之间直流降压并启动机器人以调整正确的初始姿势。
INITIAL POSE(见上图) - 》 尽可能靠近上图重新调整所有腿。
在给机器人加电后,如果腿部位置与上图不同,那么:
拧下伺服喇叭并拆下伺服喇叭来自伺服。
转动腿直到足够接近初始姿势
重新连接伺服喇叭并再次对其进行操作
为所有未匹配的腿做一遍
PS:
QuadrupetV2_310419_fix_connection_issue.ino已经修复了一些问题,如难以连接(wifi)和网页渲染失败,因为谁在31-3之前刷新旧程序-2019请在上面再次下载
需要安装一些额外的库(将其复制到库文件夹)
https://github.com/wimleers/flexitimer2
的https:。..//github.com/adafruit/Adafruit-PWM-Servo-Dri
的https://github上。 com/kroimon/Arduino-SerialCommand
步骤14:控制机器人
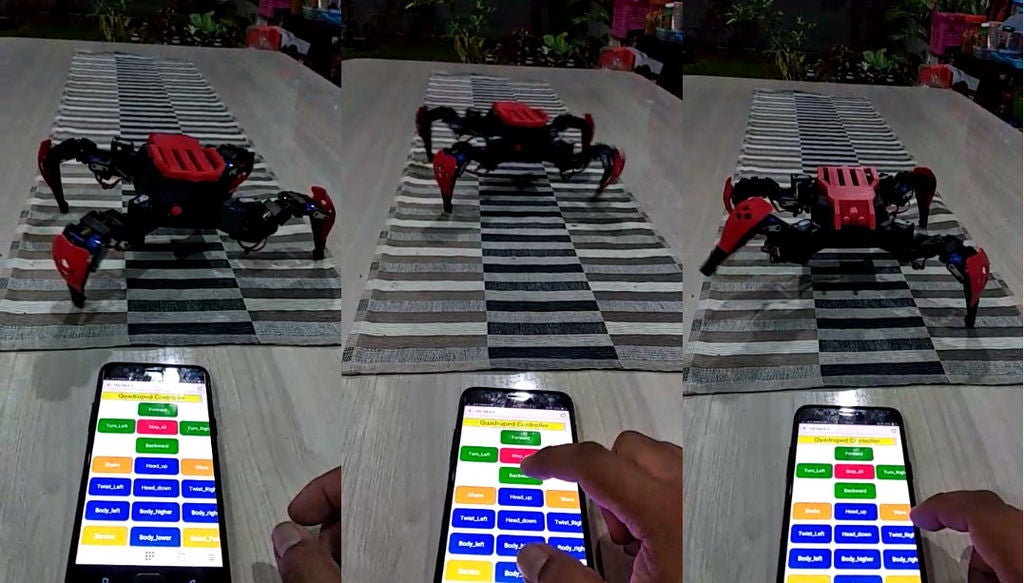
因为这个机器人成了WIFI接入点所以你需要的是:
打开机器人电源
在智能手机上打开wifi设置
使用密码“12345678”连接到SpiderRobo访问点
在智能手机上打开Web浏览器,然后键入http://192.168.4.1
现在你的机器人准备好接受你的命令。..。..
步骤15:打开网页或连接到AP的问题
我已经修复了这个问题请再次下载上面的步骤13(修复@ 31-4-2019)
一些Wemos D1 mini克隆有一个坏的或缺陷的ESP,它导致:
- 很难连接到AP
- 无法打开页面
- 加载未完成
- 相关推荐
- 机器人
-
四足步行机器人的弯道行走2012-08-12 0
-
六足机器人2013-06-06 0
-
双足机器人2013-11-25 0
-
【OK210申请】四足轮式机器人2015-06-25 0
-
请教利用树莓派制作六足机器人的问题2015-11-10 0
-
什么是龙人四足机器人?2016-03-24 0
-
四足仿生机器人2016-08-19 0
-
四足机器人2018-09-29 0
-
求六足机器人的图纸2019-03-26 0
-
四足机器人的机构设计2021-09-15 0
-
如何完整的组装四足机器人?2021-09-24 0
-
怎样去制作一款基于STC15/LPC845的四足机器人2021-09-26 0
-
四足蜘蛛机器人制作流程2021-12-06 0
-
ANYmal四足机器人的相关资料推荐2021-12-31 0
全部0条评论

快来发表一下你的评论吧 !
