

如何组装一个四轴飞行器
电子说
描述
步骤1:1.0完整组件列表
这些是我购买的组件。可以使用其他网站的组件,但请记住,从在线购买组件的经验法则是避免购买太便宜的组件。您支付的越多,您获得的质量就越高。
AliExpress.com产品 - DJI Tello相机无人机Ryze Tello与编码教育720P高清传输四轴飞行器FVR直升机
步骤2:1.1 Navio2 Emlid飞行控制器
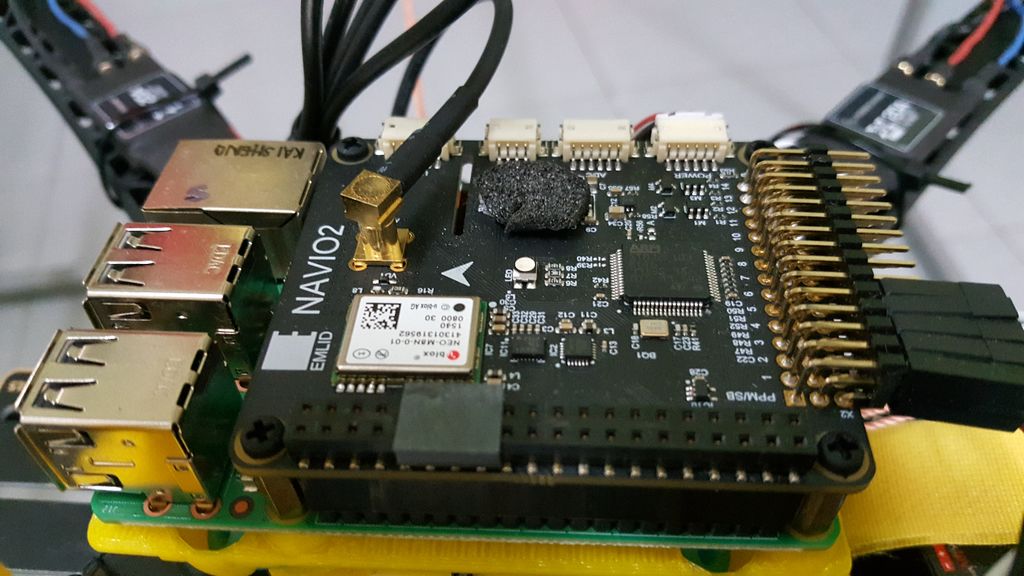
飞行控制器的主要功能是提供对电子速度的控制控制器(ESC)根据变送器的输入指示电机的转速。
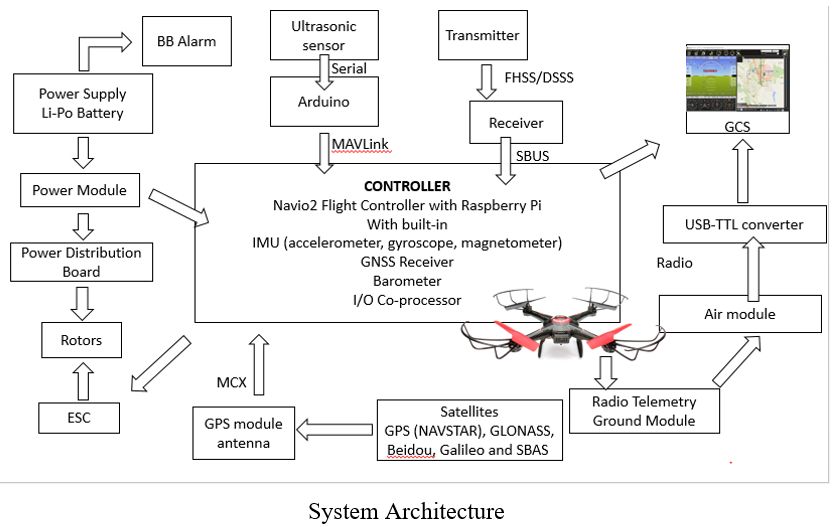
使用Navio2飞行控制器的一个优点是因为它内置了大部分组件,所以我们不需要单独购买并自行整合。 Navio2飞行控制器中组合在一起的组件包括
1。双惯性测量单元(IMU)
2。气压计测量高度精确到10厘米的分辨率。
3。全球导航卫星系统接收器跟踪来自世界各地的卫星。
4。指南针或磁力计确定航向的方向
5。扩展端口分配用于额外的传感器和无线电遥测。
6。无线电通信协处理器接受来自接收器的PPM或SBUS输入,并为伺服导轨上的电机和伺服器输出14个PWM通道
请记得同时购买阻尼球将Navio2板连接到其3D打印支架
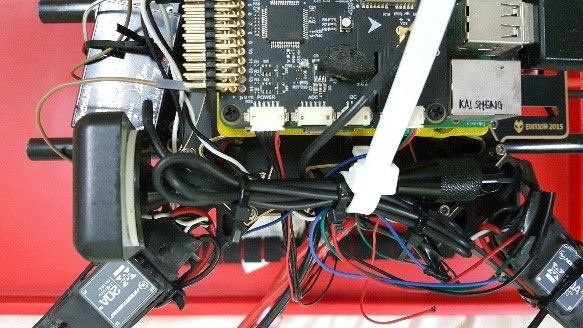
步骤3:1.2 Raspberry Pi3型号B
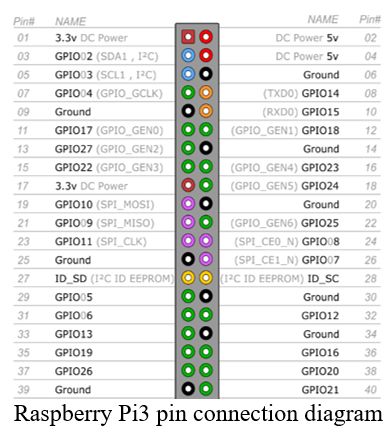
Raspberry Pi是一款微型计算机,其平均大小与数据处理信用卡相当。通过通用输入输出(GPIO)引脚,Raspberry Pi具有高运行处理能力在扩展GPIO的40个引脚中,Navio2利用37个引脚进行飞行控制,只留下3个免费GPIO用于附加组件,即GPIO 17(引脚11),GPIO18(引脚12)和GPIO 26(Pin 37)。
步骤4:1.3机身
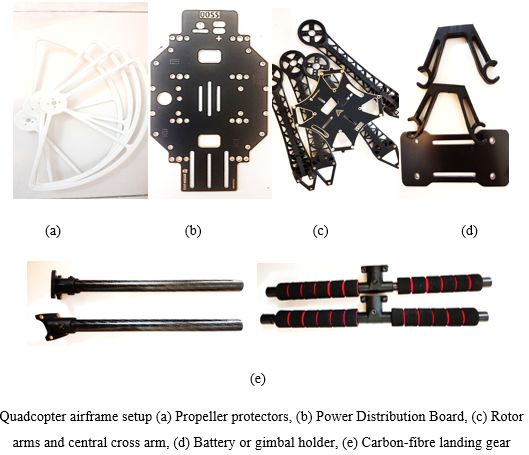
机身组成了四轴飞行器的主体,带有臂,起落架,支架,配电板和刀片保护装置。选择X框架是因为它具有良好的对称性,设计更简单,更灵活,适合突然倾斜。所选框架尺寸的框架为485 mm。机身尺寸的布置必须与电池,螺旋桨以及电机的布置相匹配,如上表所示。
要拧紧连接机身不同部件的螺钉,您将需要合适尺寸的Alan键。根据供应商提供的指南,使用合适尺寸的Alan键紧密组装机身(振动可能导致螺钉分离)。
机身应与配电板(PDB)配合使用我们焊接其端子上的所有接线,将电池连接到飞行控制器(通过电源模块线),连接到ESC和电机(通过电介质接线)。
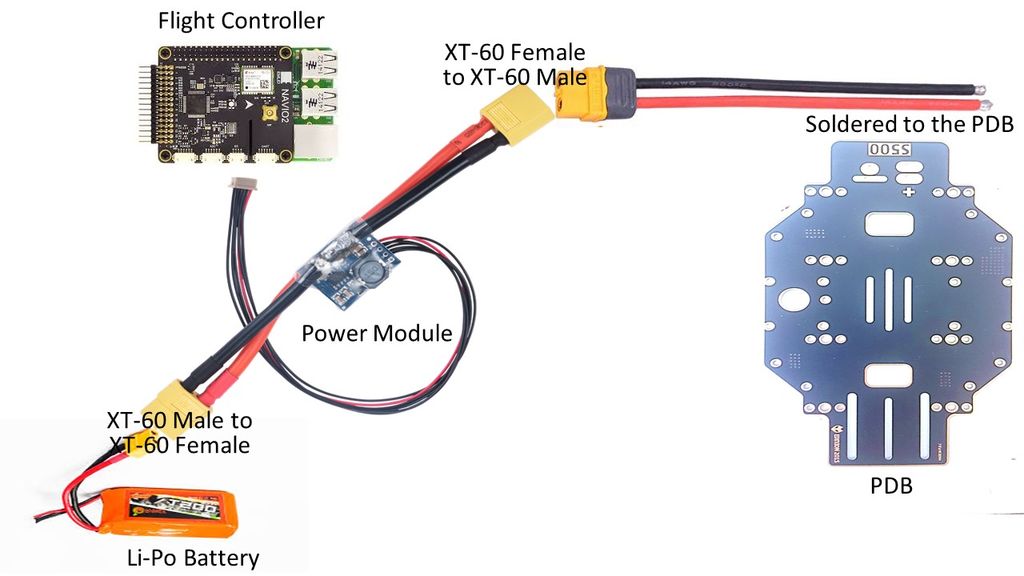
您需要一个连接器连接PDB和电源模块,连接器的一端焊接到PDB上。另一方面,您需要确保其连接器头与您的电源模块线兼容。电源模块将电流从电池分流到PDB,将一小部分分流到飞行控制器。因此,其终端连接器也必须与电池的兼容。参考上图,XT-60连接器将连接到其XT-60对应物,而T型连接器必须连接到其T型连接器对应物。
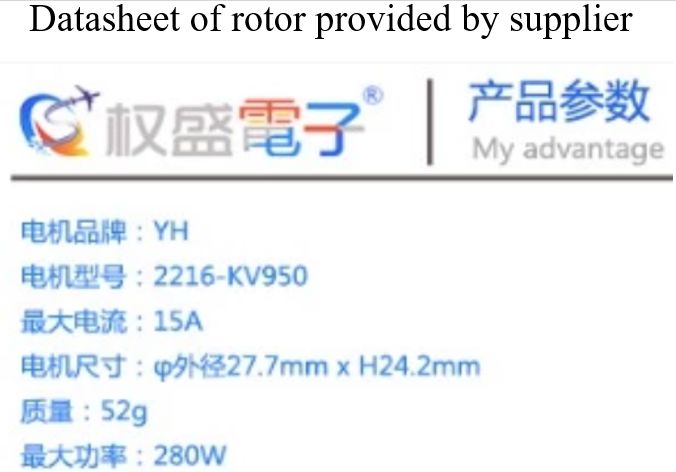
步骤5:1.4电机2216/950KV



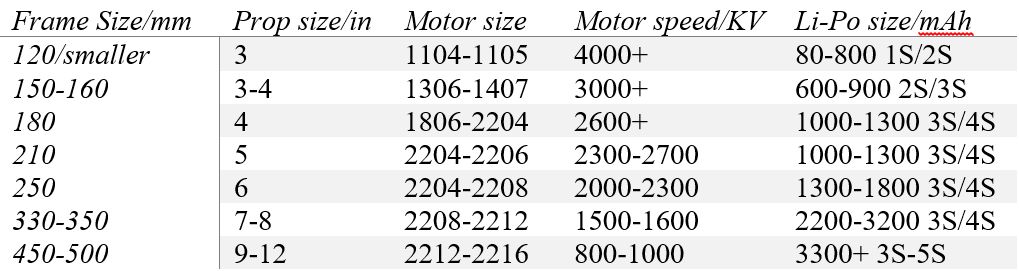
电机类型的选择取决于螺旋桨或无人机的大小。较大的螺旋桨应由较低转速的转子提供动力,因为空气阻力较高。 950 KV电机意味着电机连接的每伏特的转速为950 rpm。 2216指定电动机尺寸。以下数据(也显示在组件的图像中 - 1.2机身)可作为一般指南,但最合适的电机尺寸可以是制造商/经销商建议的尺寸。
框架尺寸---电机尺寸---电机KV/速度 - 支柱尺寸(In)
《120 ------------ 1104-1105-- ----- 4000 + ----------- 3
150-160 ------- ------- 1306年至1407年3000 + - ---------- 3-4
180 ------------- 1806-2204 ------- 2600 + ---- -------- 4
210 ------------- 2204至2206年------- ------ 2300至2700年5
250 ------------- 2204年至2208年------- ------ 2000-2300 6
330-350 --- ---- 2208至2212年------- ------ 1500-1600 7-8
450-500 ------- ---- 2212-2216 --- 800-1000 -------- 9-12
建议购买一些电机盖备件(如第三张照片所示)。电机盖将螺旋桨盖住并保持在适当的位置,如果盖子没有拧紧,可能很容易脱落(强烈建议使用扳手将其完全拧紧)。寻找掉落的马达帽特别是在草地上可能很麻烦。如果电机盖脱落,它通常会靠近你的四轴飞行器。寻找它并且离无人机不远。
尝试购买不同颜色的电机以区分旋转方向。 2个电机顺时针旋转,2个电机逆时针旋转,具体取决于您将其连接到3相ESC输出的方式,稍后将在硬件设置部分讨论。
步骤6:1.5电子速度控制器(ESC)
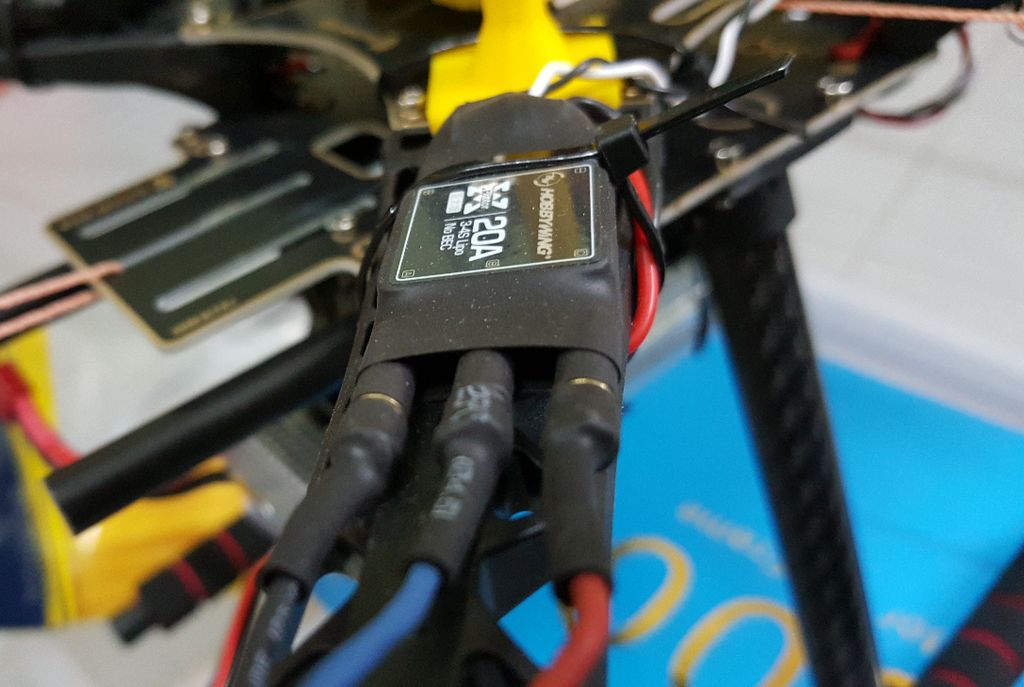

电子速度控制器(ESC)根据飞行控制器伺服导轨的输出吸取电流来驱动转子。 ESC按其允许通过的最大电流等级进行分级。因此,ESC的选择应该是ESC等级是转子最大额定值的1.2到1.5倍。例如,由于所选电机最大吸收15安培(从电机数据表中获取最大电流消耗或供应商提供的电流额定规格),每个转子的20安培电流就足够了,不会导致任何过热或烧坏。根据下面的等式,
ESC额定值/最大电机额定值= 20/15 = 1.3333
上述等式最好产生1.2到1.5范围内的值。由于最大电流消耗很少,因此ESC的20 A足以使ESC超过电机电流额定值。
建议在没有电池消除电路(BEC)的情况下使用ESC。 navio2飞行控制器可以通过伺服导轨为ESC电路和接收器提供电源。因此不需要BEC。但是,如果你的ESC带有BEC,它仍然可以使用。按照“无人机硬件设置”部分中的步骤对终端进行隔离。
步骤7:1.6螺旋桨


必须根据预期的可靠性选择螺旋桨,然后根据电机速度调整尺寸(参考组件1.2中的图像指南。碳纤维螺旋桨具有更高的质量,但可能不一定值得花费。毕竟,碳纤维螺旋桨也会在类似的冲击环境下破裂。另一方面,较软的螺旋桨甚至可能更灵活,更不易“脆弱”。它们在抵抗空气方面也不那么硬,因此可以更好地减少大型无人机中电机加热的可能性。相对较大的机身为485毫米(包括螺旋桨保护器在内的580毫米),选择的转子速度较低,为950千伏,螺旋桨尺寸相应较大,为12英寸或30.48厘米。螺旋桨在螺旋桨平衡器上使用额外的电气胶带进行平衡,以确保两个叶片质量相等。这可以最大限度地减少不平衡螺旋桨可能产生的振动。将螺旋桨安装在螺旋桨平衡器上,关闭风扇,然后用较轻的螺旋桨叶片的末端粘贴,直到达到平衡。您可以将磁带移过刀片的长度,找到完美平衡的位置。在平衡时,始终确保螺旋桨运动不受限制。它应该能够在螺旋桨平衡器上自由摆动,即使是最轻微的微风。螺旋桨平衡器的抓地力不能太紧。
步骤8:1.7带天线的GNSS接收器


全球导航卫星系统(GNSS)接收器是Navio2中的内置GPS(和其他卫星)接收器。它需要一个高度远离飞行控制器的天线,以避免组件产生的磁干扰,从而导致GPS故障或卫星信号接收不准确。 GPS支架是安装天线的地方,而另一端通过微型同轴(MCX)连接器连接到飞行控制器的GNSS接收器。微型同轴连接器将附带购买的GPS天线装置,但GPS支架必须单独购买,或在线3D打印。建议您在线购买,因为当您想在校准期间将无人机倒置时(例如右图所示),这些设计是弯曲的。
步骤9:1.8发射器

高级变送器是实现飞行车辆良好控制所需要的。这是至关重要的,否则,在沟通受损后可能导致致命伤害。 Radiolink AT10II系列是迄今为止该公司开发的最先进的发射器,提供直接序列扩频(DSSS)和跳频扩频(FHSS)无线电通信协议与接收器的混合,然后通过串行与飞行控制器通信总线(SBUS)单通信电缆。变送器可以使用供应商提供的小型2200 mAh Li-Po电池供电,以节省电池更换成本。发射器还将配备一对接收器。
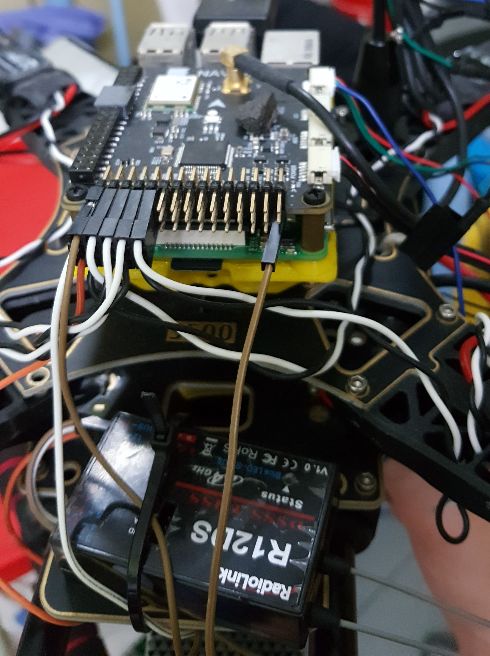
步骤10:1.9接收器

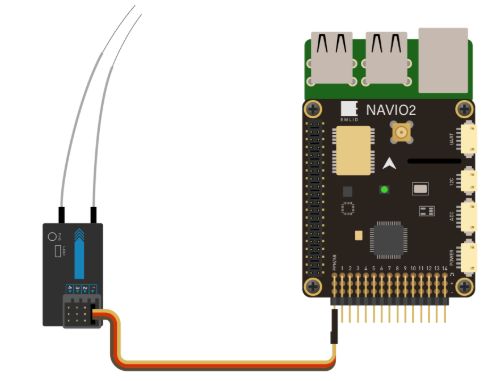
强烈建议使用收发器对,其接收器可以通过SBUS通信协议与Navio2通信。我使用的R12DS接收器接收来自发射器的信号,然后通过SBUS通信协议将信号中继到飞行控制器。 SBUS是Navio2支持的新型单线通信协议(可以节省大量杂乱的布线)。一条信号线将所有12个信道的所有无线电值从接收器(其又从发射器无线传输)发送到飞行控制器。 Navio2具有内置解码器,可在将SBUS RC输入值传递给Ardupilot之前对其进行解码。要将接收器连接到飞行控制器,您需要三个母对母跳线将SBUS线路的信号,正负端子从接收器连接到相应的信号,伺服导轨中的正负端子。 Navio2飞行控制器。使用较短的跳线以获得更好的整洁。
步骤11:1.10 MicroSD卡

类似于需要硬盘的电脑磁盘驱动器(HDD)或最新的固态硬盘(SSD)作为存储,Raspberry Pi使用microSD卡,其中安装了操作系统(Raspbian)。它包含存储系统数据的关键文件,例如连接IP地址,具有不同功能编码的文件目录等。
AliExpress会员链接购买32GB microSD Sandisk:AliExpress.com产品 - SanDisk Ultra A1 Microsd Memory卡200GB 128GB 64GB 32GB 16GB microSDHC/SDXC UHS-I 98MB/s TF卡micro sd cartao de memoria
Amazon Affiliate Link购买32GB microSD Sandisk:https://amzn.to/2V8hb42
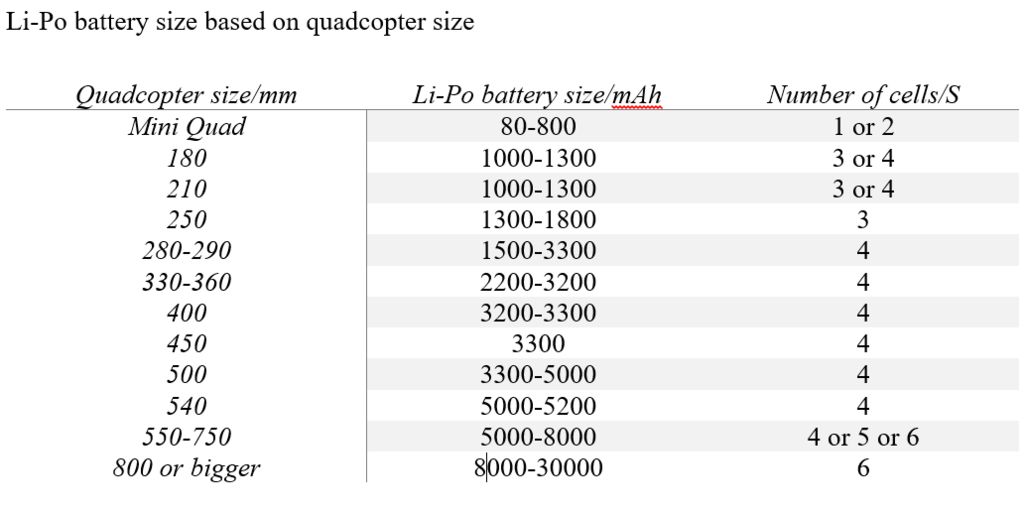
步骤12:1.11锂聚合物(Li-Po)电池
锂电池具有最高功率之一重量比,使其成为无人机动力的最佳选择之一。但是,必须彻底处理锂电池并监控其电压,以便每个电池在充电前至少保持3V(安全为3.4V)。
使用的Li-Po电池是5200 mAh电池,额定电流为25 C.为了确定放电极限C是否足以用于所使用的电动机,最大放电电流由下式计算得出。
I_max = C× Ah = 25× 5.2 = 130A
此选择符合ESC和电池尺寸,每个ESC等级为20 A,一次最多可从电池中抽取80 A(对于带有4个电机的四轴飞行器)。应用全油门的情况很少见,因此25 C电池的130 A就足够了。
Li-Po电池尺寸的选择必须考虑到直升机的尺寸以达到最佳效果。飞行时间。如果大型无人机由相对较小尺寸的电池供电,则飞行时间将受到限制。如果小型无人机由大电池供电超出最佳范围,则由于分配的额外重量,电池消耗更快。 Li-Po电池的选择最好根据表格来实现最大可用飞行时间。
您还必须购买适合焊接在配电板上的电线连接板和电源模块之间。使用T型连接器电池。如果选择这种类型的连接器,也应相应地选择Li-Po充电器和电源模块的T型连接器头。建议使用专业的锂电池充电器,因为它可以监控整个充电过程中的充电电压和电流,以避免过度充电。它还可以在发生故障时触发警报。
重要提示!购买前,请务必检查连接器是否与APM电线和电源模块的连接器类型相匹配。如果您使用的是T型连接器,则所有提到的组件都必须具有T型连接器。如果要使用XT60连接器,则所有提到的组件都必须具有XT60连接器。如有疑问,请在购买前询问经销商有关连接类型的说明。
步骤13:1.12低压报警

为了保护锂电池免受过放电的影响,BB报警 - 当Li-Po的任何电池的电池电压降至设定值以下时发出响亮的警告 - 用于监控电池电压。如果允许电池在每个电池3 V以下放电,它可能会永久损坏,永远无法再次充电。
步骤14:1.13电源模块
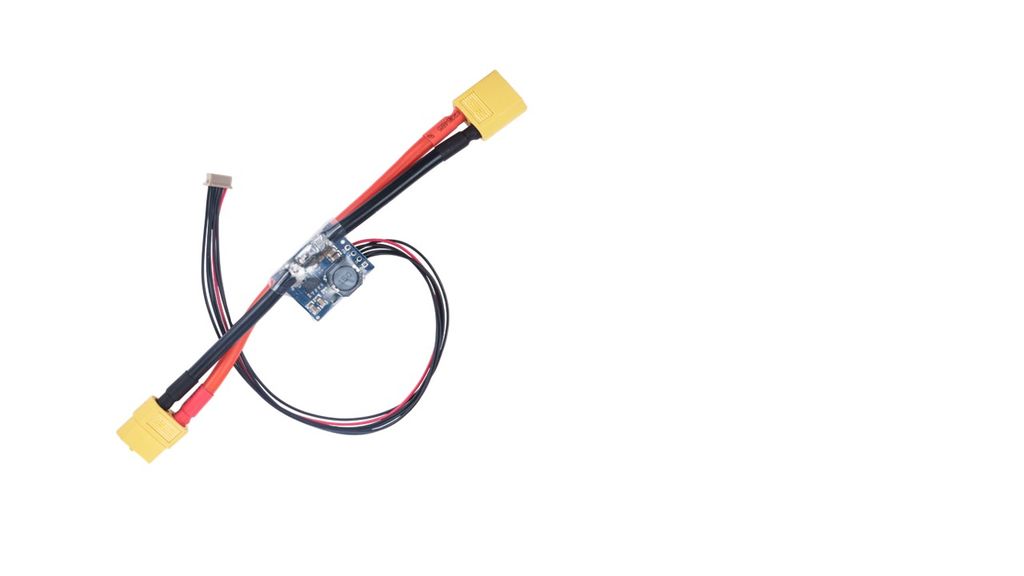
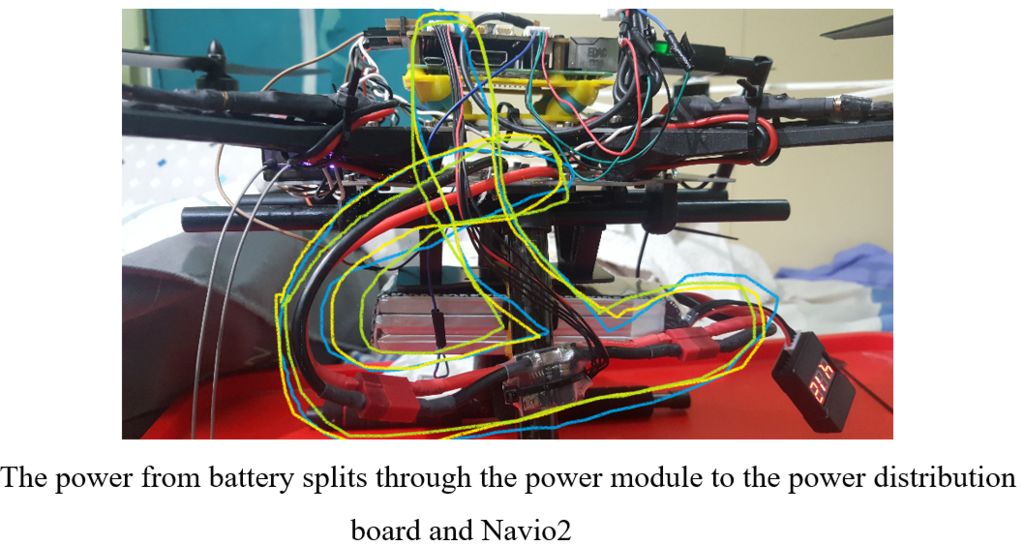
因为相同的Li-Po电池同时提供Raspberry Pi和电机,电源模块根据最佳要求控制两者之间的电压。电源模块将电池电流分配到配电板(到ESC)和navio2飞行控制器中的电源端口。应仔细选择电源模块,使连接器与电池的连接器匹配。如果购买的电池还带有T型连接器,则使用带有T型连接器头的电源模块。
重要说明!同样,在购买之前,请确保检查连接器是否与电池和配电板(PDB)的连接器匹配。
第15步:1.14遥测

无线电遥测包括一个通用串行总线(USB)接地模块,用于连接到您的笔记本电脑的地面控制站(GCS)和通用异步接收器 - 发射器(UART)空气模块连接到navio2飞行控制器。 GCS的目的是规划飞行路径并监控飞行数据。如果UART端口的串行线路必须用于其他目的,例如避障,或者UART端口的GPIO 17用于安装关断开关,遥测的空气模块可以与之相互替换。接地模块,接地模块的USB头连接到RPi3。空气模块的UART需要额外的USB-TTL CP2012转换器才能通过Silicon Labs CP210X USB-UART桥驱动器与GCS或计算机进行通信(可在线下载)。购买CP2012转换器的Amazon Affiliate链接(可选):
https://amzn.to/2Wk33t0
Amazon Affiliate购买遥测模块链接:https://amzn.to/2Lx6rYN
AliExpress联盟链接购买Navio2的MicroHeader引脚:
AliExpress.com产品 - CUAV U-BLOX NEO-M8N高精度GPS,带有两个6针+4针DF13 1.25插头,适用于Navio2自动驾驶仪
Amazon Affiliate Link为Navio2购买MicroHeader针脚:
https://amzn。到/2QBL37l
步骤16:1.15 FPV和摄像机

良好的摄像头和云台将使您能够在飞行中拍摄精彩的FPV。
只有在成功稳定无人机后才考虑购买好的相机和万向节。
Amazon Affiliate Link购买3轴万向节/相机支架(可选):https://amzn .to/2RbA2MG
相机持有人:https://amzn.to/2SfP0P2
相机:https://amzn.to/2SfP0P2(分辨率与价格成比例)
步骤17:2.0推力 - 重量比
计算四轴飞行器的推重比对于确保四轴飞行器可以起飞和用所需的有效载荷稳定飞行。
步骤18:计算四轴飞行器的“空载”重量
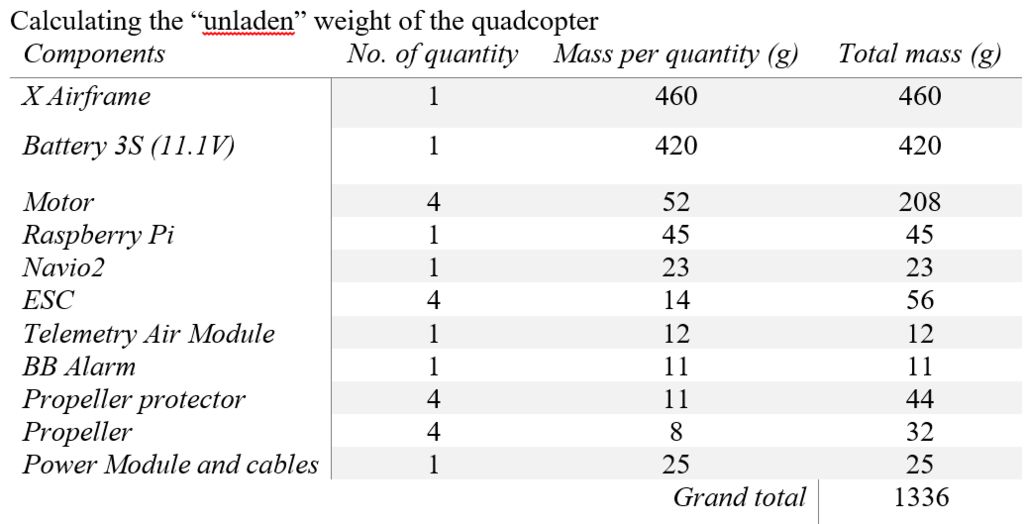
没有四轴飞行器的总空载质量任何有效载荷约为1.336千克,如上表所示。
步骤19:计算生成的推力的公式
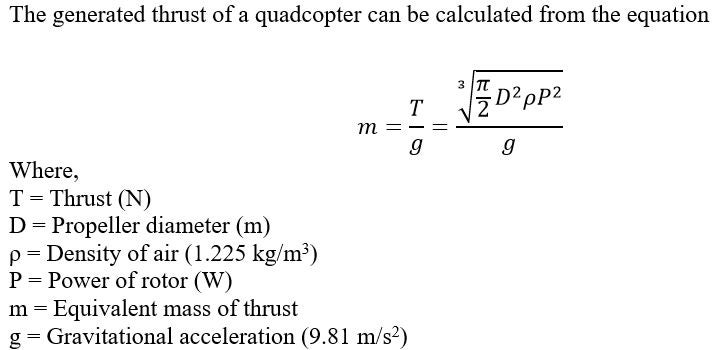
为了使无人机能够起飞,转子总产生的推力必须超过该值,或者更好,是该值的两倍。
总推力= 2×四轴飞行器的总重量
步骤20:计算推力重量比
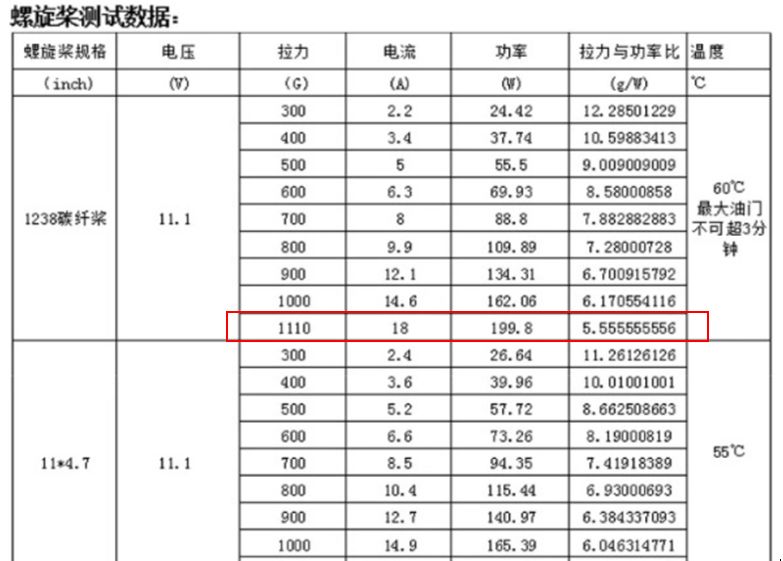
每个电机的推力也可以是直接从电机数据表中获得。如上表所示,给定的推力的等效质量为1110g,最大为18A的电流吸引到每个转子。从这里,推力的总等效质量可以通过简单地将推力乘以4转子来计算,给出m = 4×1.11 = 4.44kg。当油门上升时功率上升得更快,推力功率比降低,最高油门时功率下降最小值为5.55 g/W.
没有任何有效载荷比的四轴飞行器的推重比
=(等效推力质量)/(四轴飞行器的飞行质量)
= 4.44/1.34
= 3.4
步骤21:3.0 Navio2硬件设置
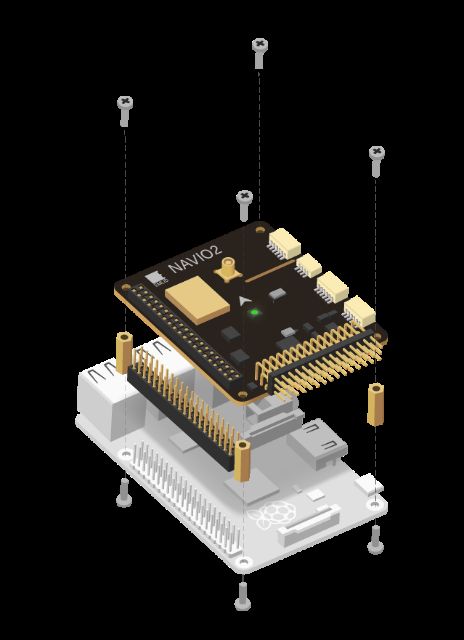
第一步是为Ardupilot设置RPi3。将Navio2护罩堆叠在RPi3上,并将螺钉固定到位以牢固地固定两者。 Navio2和RPi3一起作为四轴飞行器的FC。同时,打印出一个3D模型支架,通过该支架将FC固定在四轴飞行器的机身上。支架的两个部分通过8个减震球粘合在一起。为PDF文件“Drone BOM list”中的完整组件列表提供的链接也包括这些球。
链接支持部件到3D打印
顶部:https://github.com/emlid/hardware/blob/master/Vibr.。。
Bottom:https://github的.com/emlid/硬件/斑点/主/振动干燥。。.
步骤22:​插入吸震球以将2个印刷支架部件固定在一起
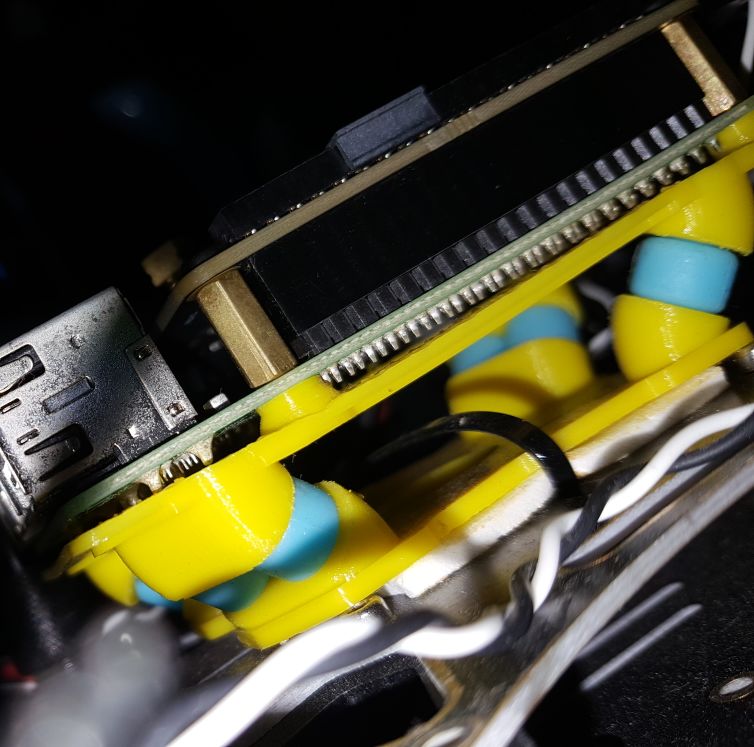
插入用于将2个印刷的支架部件固定在一起的减震球,对球不要太温和,否则将永远完成任务。注意,这些球是柔韧和可拉伸的。利用像小型艾伦内六角扳手这样的薄工具推动球的尖端,使它们卡在颈部,进入两个印刷部件之间的孔中,这两个部件已正确定位,如上图所示。重复另外7个球,每个角落2个球。然后,使用提供的螺钉将Raspberry Pi背面连接到印刷支架的上表面(具有较大表面积的支架)。
Amazon Affiliate Link购买阻尼球:
https://amzn.to/3122Kl3
AliExpress会员链接购买减震球:
AliExpress.com产品 - 4个通用防振球阻尼橡胶球震动Quadcopter四轴摄像机Gimbal GoPro Hero Drone的吸收器
步骤23:4.0无人机硬件设置
完成上一步后,离开Raspberry Pi(与Navio2航班堆叠)控制器)与支架一起然后继续设置机身。
如果您愿意尝试,可以先尝试组装机身,但在电机和电机之后必须拆卸它以进行焊接。 ESC到达。
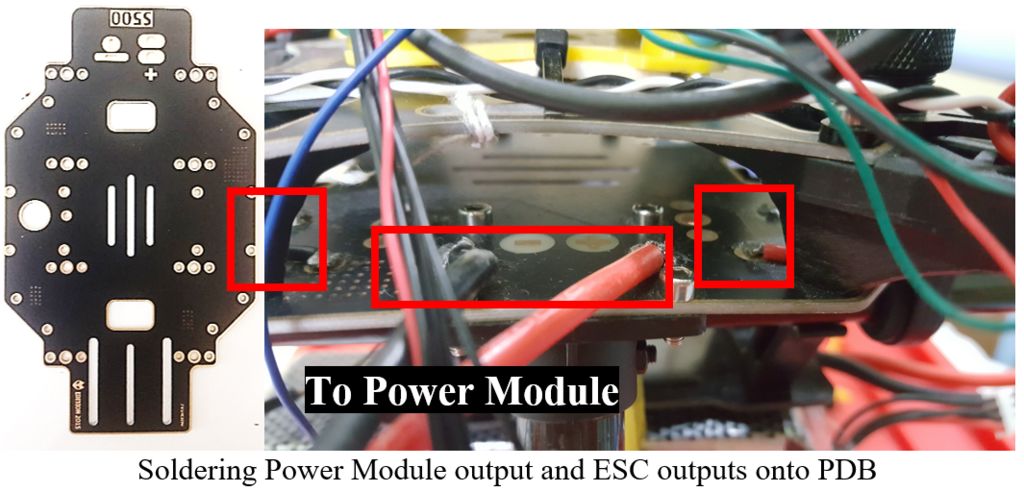
您的机身应包含配电板。找到板的表面,其圆形铜端子标有正负号,用于焊接组件。使用万用表的连接测试来测试所有正极端子是否连接,所有负极端子也是如此。我使用焊接表面朝上,所以我需要确保在焊接电缆时,它们不会妨碍连接到顶部中央横臂连接器的任何螺钉开口。在配电板上找到合适的正极和接地端子,将电源模块和所有4个ESC焊接到配电板的每个角落。所有4个电调和电机都是相同的,可以连接到任何地方,因此您无需担心它们中的哪一个连接到哪个角落。将红色电缆焊接到电路板上的正极端子,将黑色电线焊接到电路板上的负极端子。中央电缆(通常)是连接到navio2飞行控制器的信号电缆。
确保正极和负极端子不会短路并在焊接后再次测试连接性。使用更多焊料固定到电路板的连接,并通过轻轻拉动电缆来测试连接。完成后,配电板应该看起来像一块带有悬挂螺纹连接牢固的板,4个ESC和1个电源模块。这些组件中的每一个都通过2条线连接 - 红色表示正极,黑色表示负极。
步骤24:4.1
然后,使用合适尺寸的内六角扳手将顶部中央横臂连接器与四轴飞行器臂组装在一起,然后将组合结构与配电板连接。如果您决定将焊接表面朝上(与其他接线短路的可能性较小但需要拆卸机身以进行重新焊接,这可能非常罕见),请调整ESC的接线,使其不会阻塞连接点。现在,使用厚双面胶带将包含Raspberry Pi 3和Navio2的支架安装到中央横臂连接器上。
步骤25:4.2

将电机安装在每个四轴飞行器臂的末端和螺旋桨保护器(可选)上,三相线向内平行于每个四轴飞行器的臂。使用提供的螺钉将它们紧紧固定到位。
步骤26:4.3
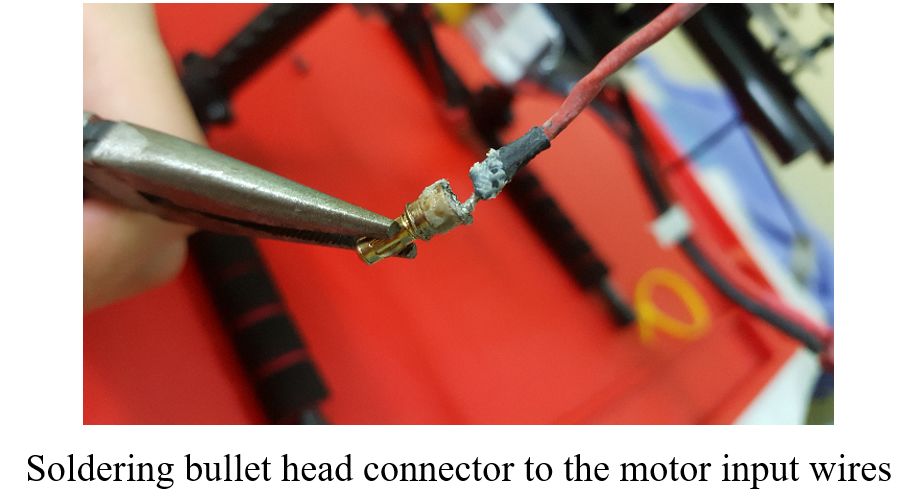
然后,如果电机做的话没有容易焊接的子弹连接器,将子弹连接器焊接到电机的每根三相电线的末端。要做到这一点,使用薄头钳来固定子弹头连接器(在焊接过程中可能非常热),然后将焊料熔化到圆柱形开口中。在焊料硬化之前,将电线从电机推入子弹头连接器。
步骤27:4.4

在移动之前,保持几秒钟让焊料完全硬化。尝试用力来测试连接强度。连接松动可能导致中途飞行中的电机故障,导致崩溃。如果供应商提供了用于绝缘的热缩管,则切割足够量的管并将其放置在子弹头下方暴露的金属部件(连接焊料)上,然后从焊枪或打火机施加热量以收缩并覆盖它。否则,请使用电气绝缘胶带。
步骤28:4.5

接下来,确保每个ESC安全使用电缆扎带的四轴飞行器的每个臂的顶部(或底部)表面。然后,现在,通过施加相当大的强度,将无刷直流电机的三相线的子弹头连接器(可以是其他类型的连接器)随机连接到ESC的3个输出。到BLDC电机的三相准AC输入将交替地磁化定子中的可激励线圈中的线圈,使得它们排斥永磁体(转子)转动。电机三相输入的顺序将决定电机的旋转方向。为了确保ESC输出正确的交流电流序列以使电机按要求方向转动,您需要稍后进行测试。
步骤29:4.6
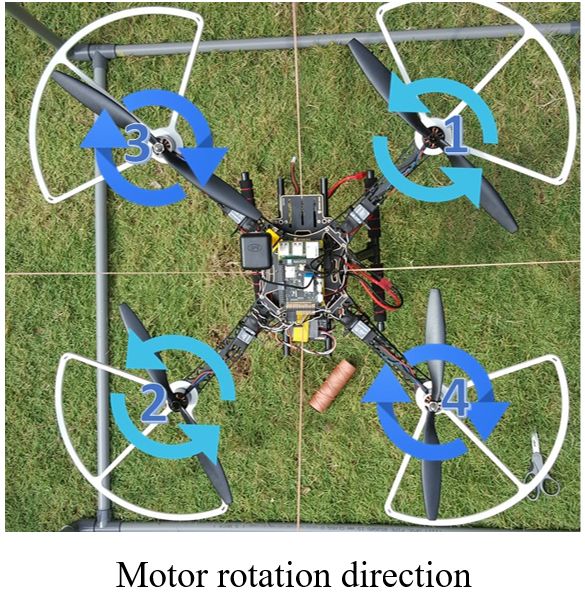
当你的四轴飞行器第一次装备时(在你完成所有步骤之后),所有螺旋桨都被移除,你需要确保方向每个电动机的电动机旋转如下。如果任何电机没有按要求旋转,只需将从电机(旋转方向错误)随机连接的任何2根电线与其电源ESC互换。用手指感觉所有电机在校正方向上旋转,如
1。右前 - 逆时针
2。左后方 - 逆时针方向
3。左前方 - 顺时针方向
4。右后方 - 顺时针方向
步骤30:4.7

但这只是其中之一你还要做的最后几步,还有很多工作要做。将此部分保持在最后(此后将再次提醒您)并继续执行以下操作。
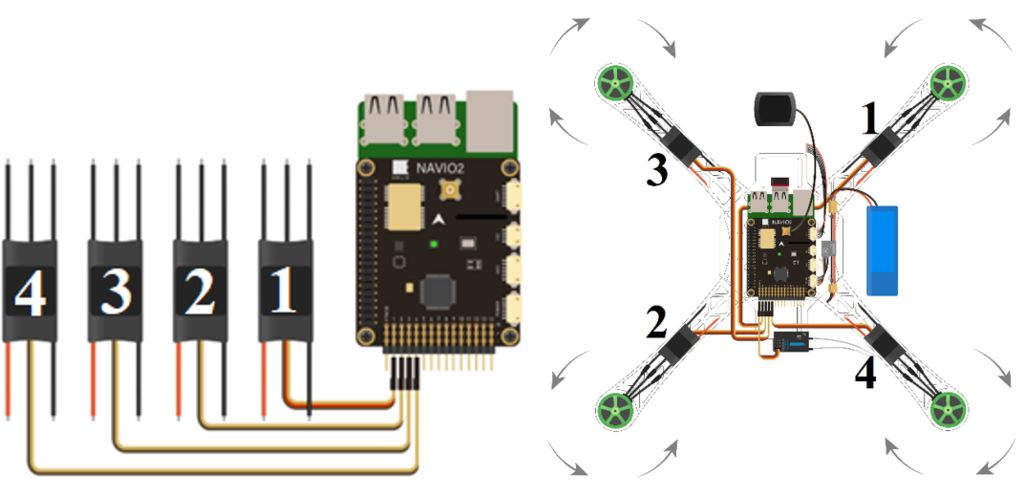
在此之前,您需要将ESC连接到飞行控制器的伺服导轨,如上图所示。请参阅链接中的Emlid文档:
docs.emlid.com/navio2/ardupilot/hardware-setup/
您现在应该将您的ESC正负输入焊接到配电板,中央信号线应连接到伺服导轨。现在,每个ESC的连接必须是特定的。从伺服导轨的左侧看,最左边的列是SBUS通信线(我们稍后会处理它)。第二列,第三列,第四列和第五列分别用于第一,第二,第三和第四ESC。请根据上面的Emlid提供的图表连接它们。
步骤31:4.8
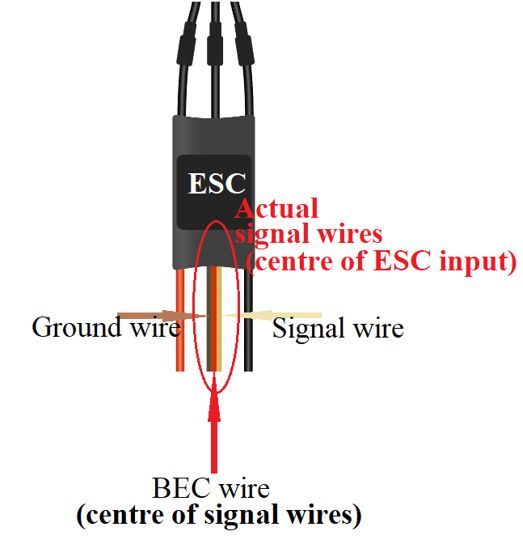
让我们将ESC的中心线命名为信号线。信号线由实际信号线,BEC线和地线组成。
信号线(ESC的中心)由2根线(用于没有BEC的ESC)和3根线组成(用于带有ESC的信号线) BEC)。如果您的ESC没有BEC,它将没有中央BEC线。信号线的中心是空的。如果您的ESC具有BEC,则BEC线通常是“中心的中心”。它通常是3根信号线的中心线,位于ESC输入的中心。
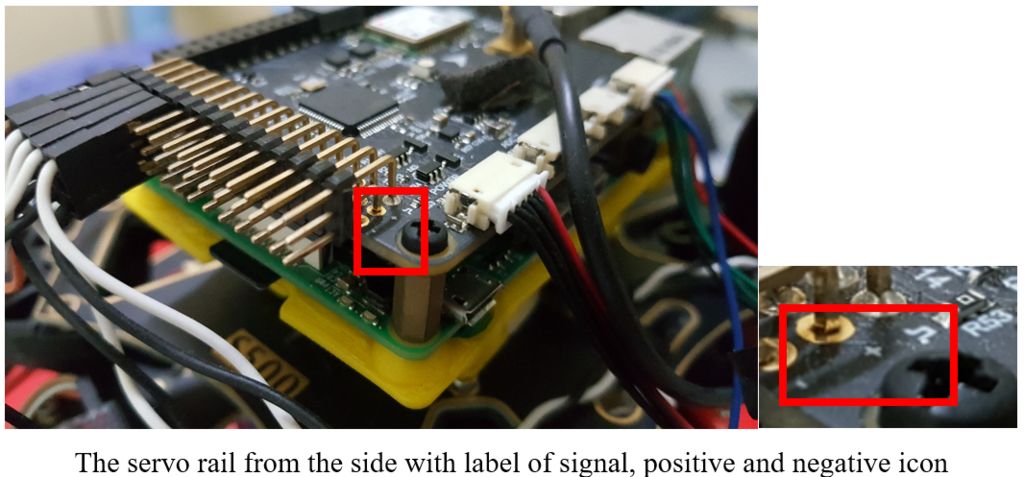
如果你的ESC有一个电池消除器电路(BEC),只连接你的第一个ESC的BEC线(可以是任何其他只有一个的ESC),如左图所示,如左图所示从第一个ESC延伸的橙色线。对于其他ESC,BEC电缆被切断并绝缘(不要切错 - 仅“中心”)。这意味着只有一根中央信号线的ESC中心线(BEC线)连接到伺服导轨。来自其他3个ESC的其他BEC线被移除。这样只留下第一个带有3根信号线的ESC(带有BEC线,实际信号线和地线),其余的ESC带有2根信号线(带有实际的信号线和地线)。我们知道通常“中心”是BEC线,但为了区分实际的信号线和地线,你必须测试它。再次,在你操纵四轴飞行器之后,这样做。如果您的电机不能按照变送器命令工作(您可以听到速度的变化),那么您的连接是错误的。根据经验,黑色或深色线通常是地线。在伺服轨侧,信号,正极和负极分别标记为顶部,中间和底部行。中间(正)行是剩余的一条BEC线(如果有的话)应连接到的位置,而实际的信号线应连接到标有方波信号图标的第一行(相应列)。最后,接地线应连接到伺服导轨最后一排的相应列。
如果您的ESC没有BEC,则无需移除或添加任何东西。
步骤32:4.9
要将接收器连接到飞行控制器,您需要三个女性到-female跳线将SBUS线路的信号,正负端子从接收器连接到Navio2飞行控制器伺服导轨中的相应信号,正负端子。标记为“PPM/SB”的第一列或最左列分别为第一,第二和第三线上的SBUS通信提供信号,正和负端子。使用较短的跳线(为了更好的整洁)将它们连接到接收器中的对应物。用扎带固定接收器。
步骤33:4.10
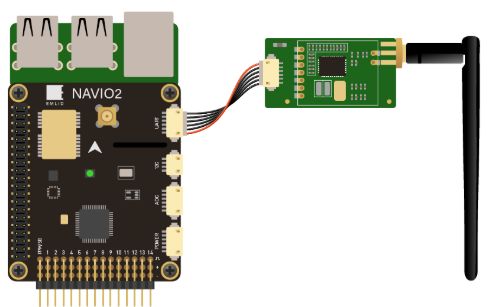
连接ESC,电机后,电源模块和接收器与机身,我们留下遥测模块,GPS天线和电池。遥测模块成对出现 - 一个空气模块和另一个接地模块。空气模块通常带有一个UART微型插头引脚连接,可连接到navio2的UART端口,如下图所示,而接地模块则带有USB连接器以连接到PC。
步骤34:4.11
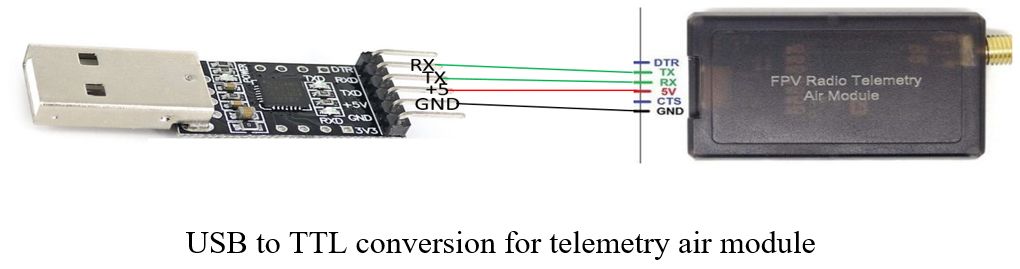
(如果以正常方式连接,请跳过以下部分)尽管如此,您可以互换空气接地模块通过将接地模块(带USB连接器)连接到Raspberry Pi,将空气模块(带UART连接器)连接到PC。后者需要额外的USB-TTL CP2102转换器,以便空气模块可以连接到PC的COM端口。空气模块与转换器的连接需要焊接,如下图所示。
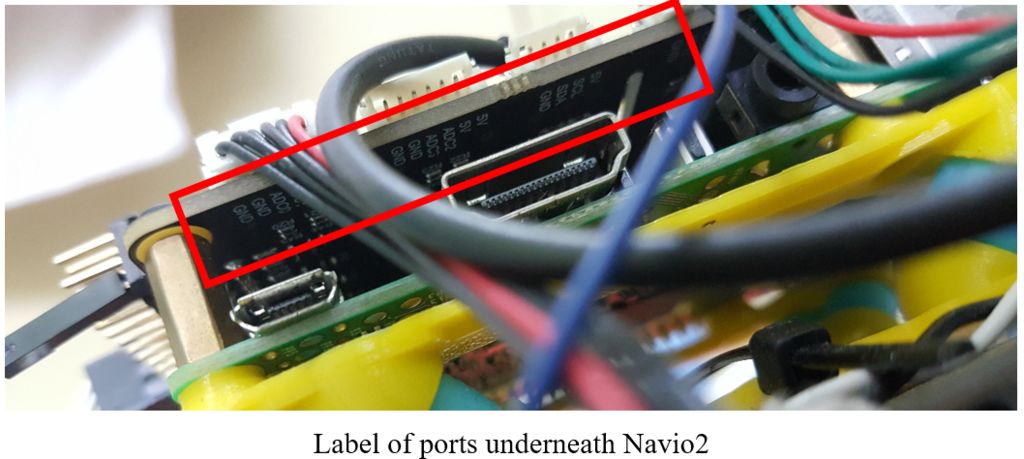
USB-TTL转换器上的标签清晰正确,但在空气模块上,封面内的标签可能不准确。保持遥测空气模块侧的微型插头引脚,并切断连接到UART端口的微型插头引脚。从它们与Navio2的UART端口的连接来看,我们可以准确地知道哪条线是TX,RX,5V和GND。端口标签可以在Navio2板下面找到,或者如下所示。连接到UART端口上的RX的电线连接到空气模块上的TX端子,而连接到UART端口上的TX的电线连接到空气模块上的RX端子。基于类似的工作原理,空气模块上的TX端子应焊接到连接到USB-TTL转换器RX的跳线,反之亦然。
步骤35:4.12
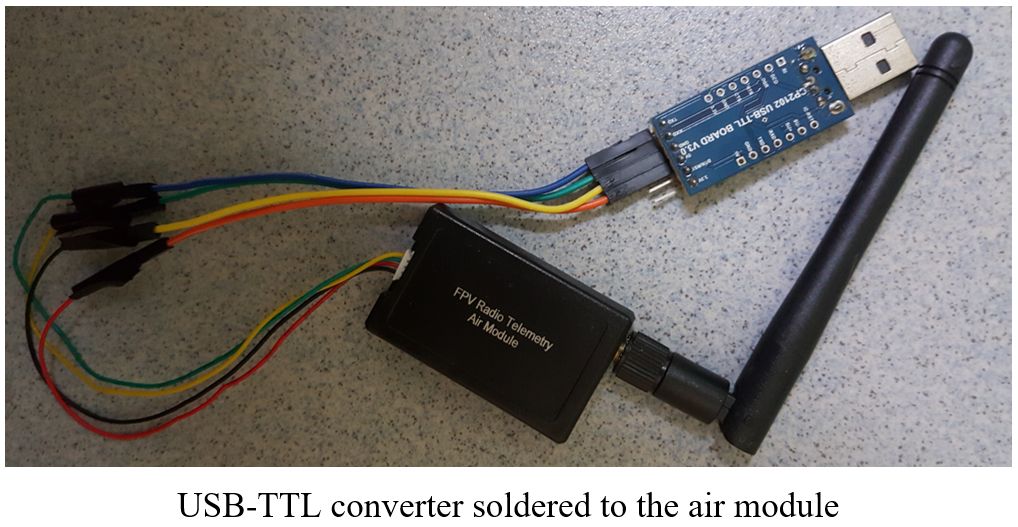
连接5V和接地引脚后,空气模块上的LED将开始闪烁,表示整个电路为空气模块供电。确保转换器的RX引脚连接到遥测空气模块的TX,同时转换器的TX引脚连接到空气模块的RX。当空气和地面模块彼此通信时,完成连接将显示LED的稳定亮度,但这并不意味着遥测可以在传输GCS数据方面起作用。要实现这一点,必须通过登录微型计算机操作系统对RPi3进行微小设置。
从“ etc/default/arducopter”文件,连接配置已更新以允许此操作。当您在“连接到地面控制站(GCS)”
”部分进行设置时,将在后面的步骤中显示详细信息。步骤36 :4.13

GPS支架是安装天线的地方,而另一端通过飞机控制器的GNSS接收器连接微型同轴(MCX)连接器。
步骤37:4.14
电池牢固地系在电池座下面使用连接系带/电池连接电源并连接到电源模块,如下所示。现在应将电源模块的其中一个输出焊接到配电板上。另一个输出,一个从电源模块分支出来的6针微型插头,现在连接到navio2飞行控制器的电源端口,如上图所示。
步骤38:4.15
连接电池后,您将成为启动Raspberry Pi,Navio2,接收器和遥测。 Navio2将闪烁LED,其颜色将决定飞行控制器的不同条件。遥测模块具有闪烁的LED,当与地面对应物建立连接时,该LED变为稳定。接收器还应具有指示其供电的LED。
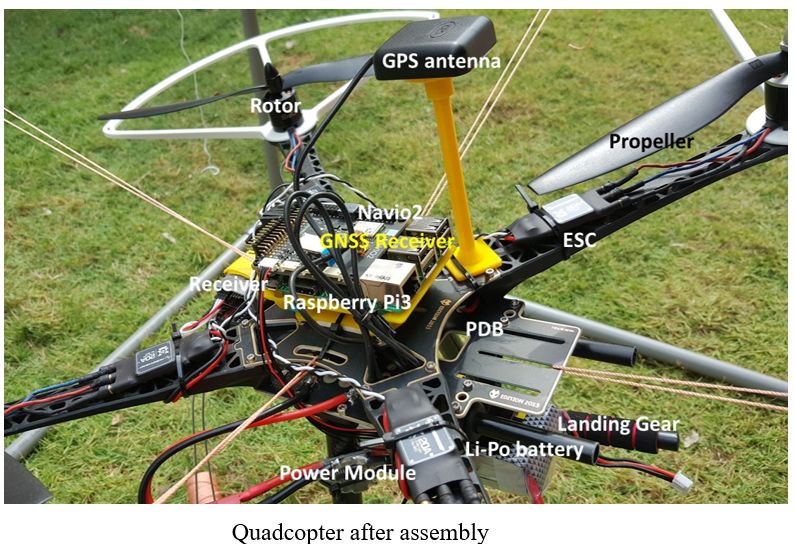
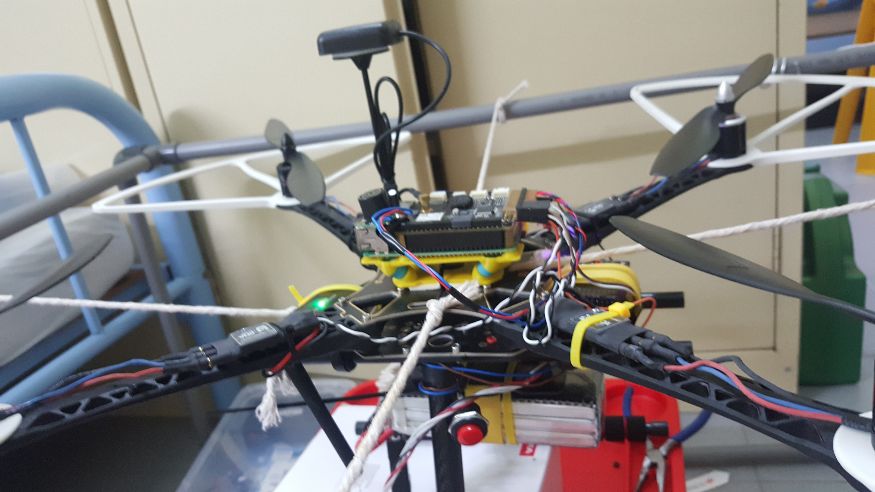
组装的四轴飞行器如下所示。请记住使用扎带将所有松散的部件牢固地系在一起。然后,在完成所有硬件设置后,您需要执行一系列软件设置,网络配置和飞行校准,然后才能将其设置为首次飞行。
步骤39:5.0将操作系统闪存到MicroSd卡

将用作微型计算机RPi3的microSD卡,必须安装Raspbian操作系统(OS)。选择合适的16GB或32GB大小。访问
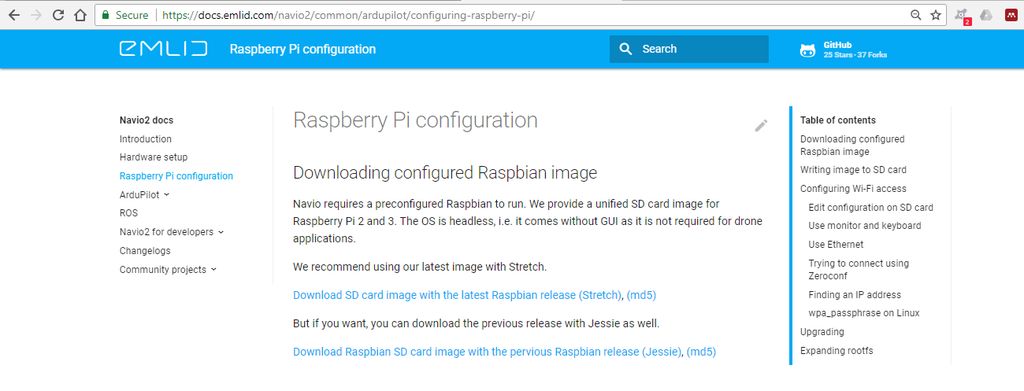
https://docs.emlid.com/navio2/common/ardupilot/configuring-raspberry-pi/上的Navio2开发人员文档,并将操作系统映像下载到您的计算机。记住存储文件的位置,因为下载的压缩文件将在以后“闪存”到您的microSD卡上。
步骤40:5.1
然后,我们需要一个软件将下载的操作系统刷入microSD卡。访问https://etcher.io/下载并安装Etcher。提取Etcher文件并在您的PC上运行。
步骤41:5.2
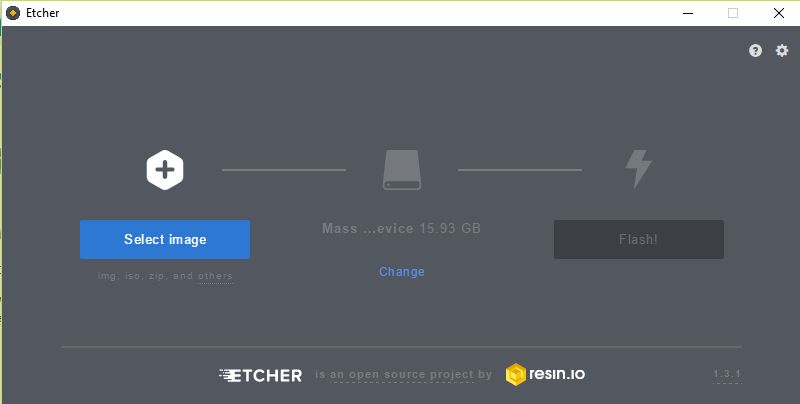
我们运行Etcher后,所选归档文件中的操作系统映像被“闪现”进入microSD卡。结果发现,此过程可能与某些需要使用其他PC的PC不兼容。
使用合适的读卡器或microUSB将新的或新格式化的microSD卡插入PC适配器。通常Etcher会自动选择microSD卡作为闪存设备。否则在选择操作系统映像之前将设备更改为microSD卡。
步骤42:5.3
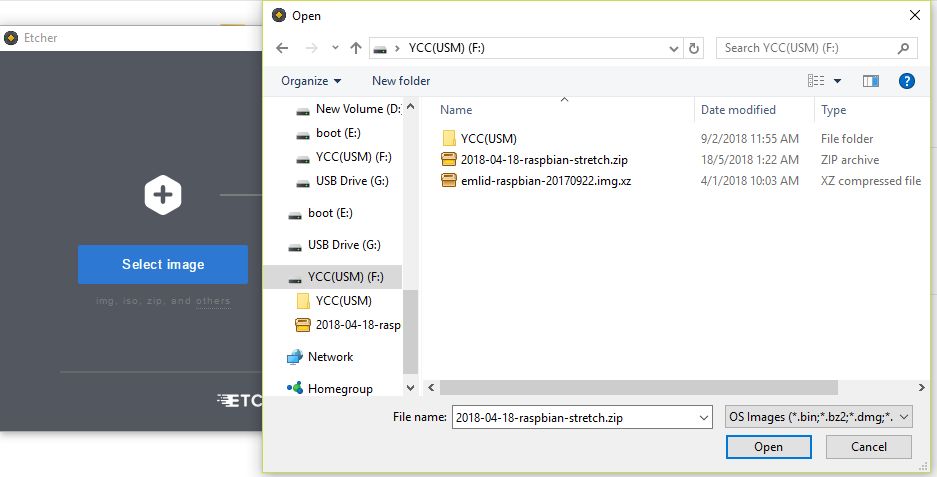
选择从您下载的操作系统映像zip文件。然后在点亮后点击闪烁!
步骤43:5.4
这是闪存操作系统所需的全部内容将图像发送到microSD卡。 Ardupilot的操作系统映像很简单,没有花哨的GUI,并且易于使用。请注意,您的microSD卡现已分区,以便使用Navio2 Flight Controller。如果您希望对其进行格式化(如果以某种方式在闪烁后或多次启动后它会损坏),请记住在格式化后删除分区。 AOMEI分区管理器等软件可用于此目的。
在“flash”之后,您的microSD卡现在可以插入Raspberry Pi3,然后开始网络配置设置,然后是安全shell( SSH)使用PuTTY将Raspberry Pi连接到笔记本电脑。
步骤44:6.0 Raspberry Pi Wi-Fi网络配置设置
要将Raspberry Pi安全保护到您的笔记本电脑,您需要将Raspberry Pi和笔记本电脑连接到同一个LAN网络 - 无论是通过无线(Wi-Fi)还是通过有线(以太网)连接。
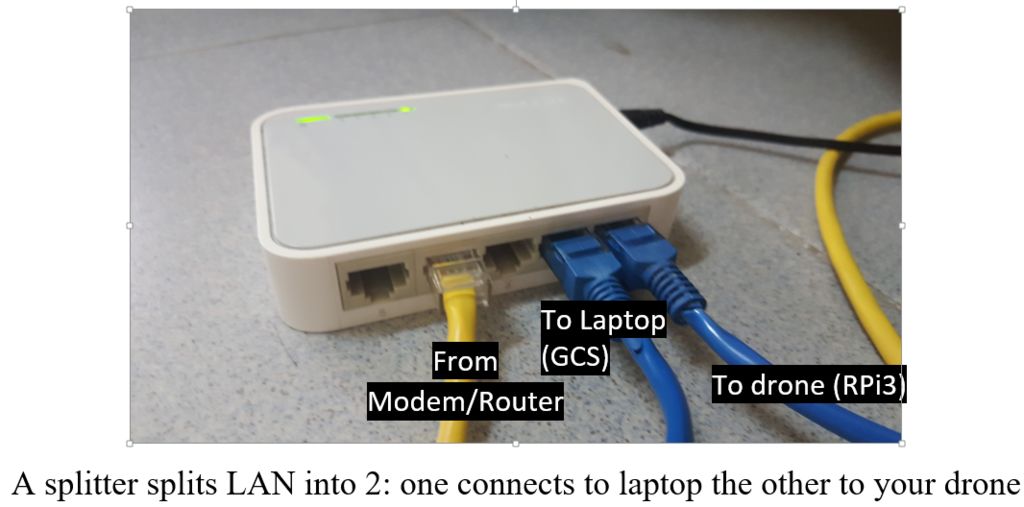
让我们开始将Raspberry Pi连接到互联网。如果使用LAN(或以太网)电缆,则更容易。将RPi和笔记本电脑连接到同一LAN电缆端口,这需要您使用LAN电缆分配器。将LAN端口拆分为2条LAN电缆。一个连接到您的笔记本电脑,另一个连接到您的RPi。就像在PC上一样,如果您使用以太网电缆连接到互联网,则无需在Raspberry Pi微型计算机上执行WPA网络配置(安全性),因此您可以跳过以下步骤。
步骤45:6.1
否则,如果您没有拆分器或者您没有使用LAN电缆端口,那么按照下面的无线配置步骤,就像您将PC连接到无线网络一样 - 它只是比通常将您的日常设备连接到Wi-Fi更复杂。
请请注意,此网络配置设置仅用于将Raspberry Pi连接到Wi-Fi网络,以便它与您的PC共享与PC连接的网络。它与您通过遥测模块进行的地面控制站(GCS)通信所执行的网络配置不同,稍后将对此进行讨论。
如前所述,如果您使用的是以太网电缆,可以跳过以下步骤直接转到“笔记本电脑上的SSH Raspberry Pi”。
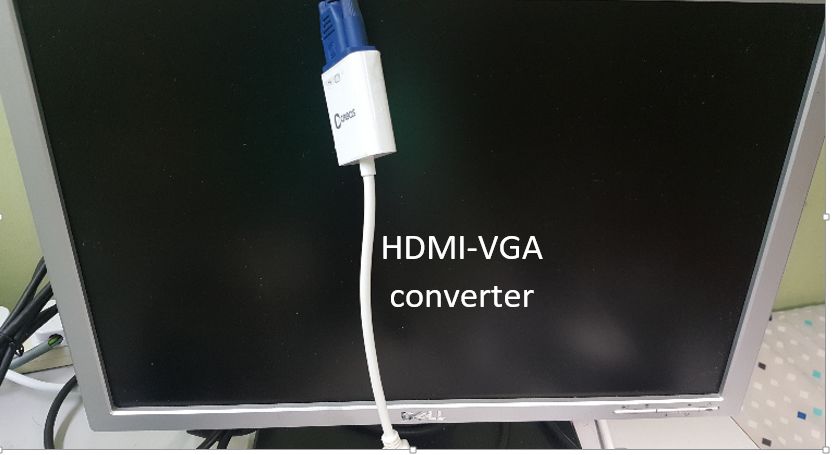
否则,需要进行网络配置设置。因为此步骤是在您的笔记本电脑上启用SSH Raspberry Pi,所以在此之前,您只能使用外部HDMI监视器和键盘登录Raspberry Pi。仅限第一次连接设置(除非您不想在笔记本电脑上使用SSH,而是始终使用显示器),将Raspberry Pi连接到HDMI显示器或使用HDMI-VGA转换器连接到VGA显示器。
步骤46:6.2

通过连接microUSB充电线或者通过连接来启动Raspberry Pi通过电源模块将其连接到Li-Po电池。请注意,如果您使用的是锂电池,请始终连接BB警报以监控电池电压,以避免在电池电压低于每个电池3 V时造成无法修复的损坏。
步骤47:6.3

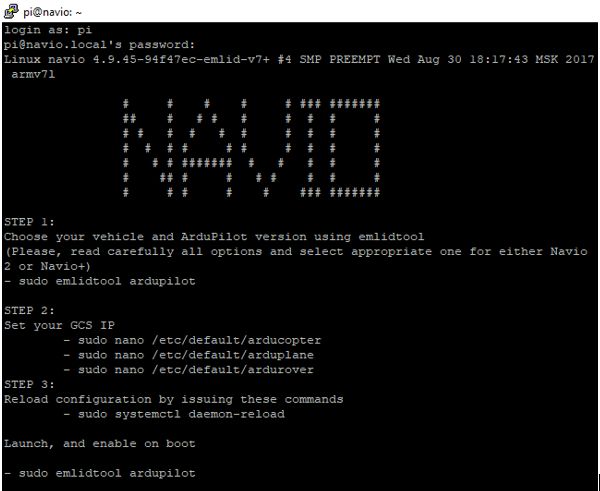
然后,通过查看监视器屏幕,输入默认用户名和密码登录操作系统。默认用户名为‘ pi’密码是‘ raspberry’。密码可能不会显示,但无论如何都会输入每个输入的命令。
步骤48:6.4
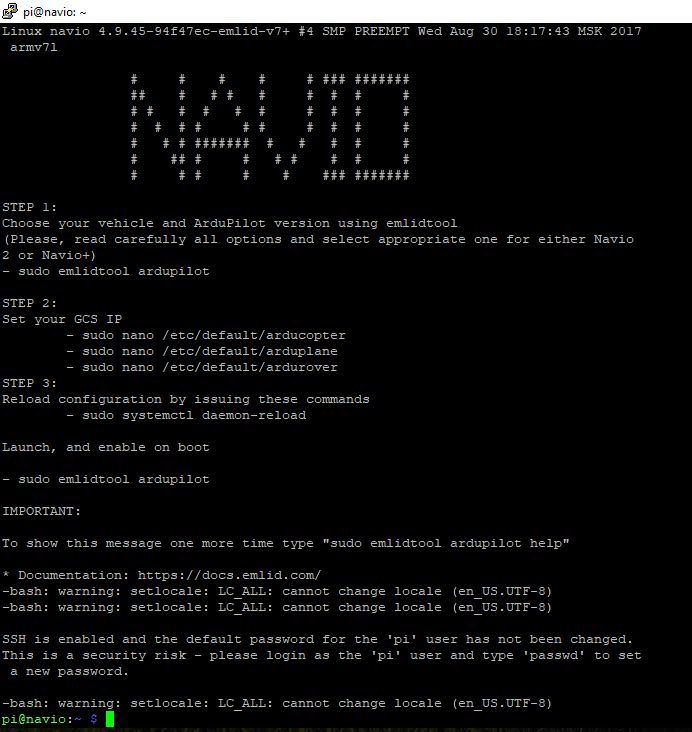
当您登录操作系统时,您将看到如下页面
步骤49:6.5
复制并粘贴命令:
sudo nano/boot/wpa_supplicant.conf
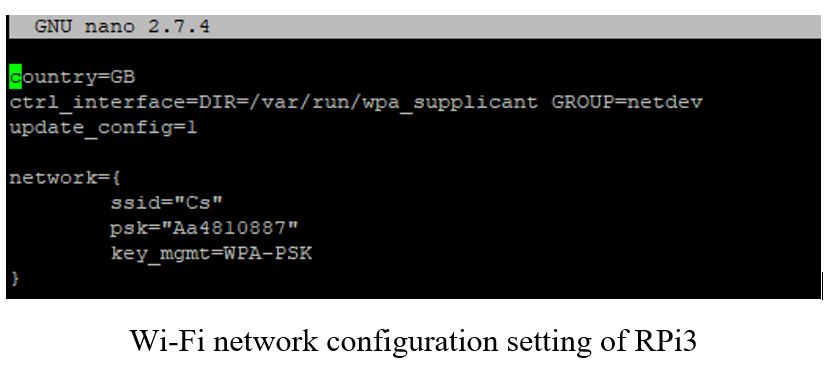
并按Enter键转到该文件以配置Wi-Fi设置。输入RPi3和笔记本电脑(带PuTTY)连接的网络的密码和用户名,如图所示。在ssid行的“NETWORK NAME”和“psk line”的Wi-Fi网络密码之间填写网络名称。如果您的本地网络没有密码保护,请将psk的“”留空。这些只是您通常用于将设备连接到Wi-Fi的网络名称和密码。要移动绿色文本插入光标,请使用箭头键。
步骤50:6.6
之后,按“Ctrl + X”退出并按“Y”键,然后按“Enter”键保存您在网络配置文件中编辑的内容。通过输入命令sudo reboot重新启动ardupilot。
如果您没有显示器或键盘,也可以通过编辑microSD卡中名为wpa_supplicant.conf的文本文件来完成整个编辑过程。要执行此操作,只需从Raspberry Pi中取出micro SD卡,将其插入笔记本电脑或PC,然后查找文本文件以编辑ssid和psk设置,就像使用显示器编辑它一样。这一次,右键单击该文件并使用WordPad等合适的软件打开。编辑后保存txt文件。
然后,如果您在监视器显示屏上,请键入命令sudo reboot重新启动Raspberry Pi。设备重启后,您的Raspberry Pi将能够在启动时自动连接到您设置的Wi-Fi网络(尽管连接可能需要一些时间)。在以下步骤中,SSH连接需要将Raspberry Pi和笔记本电脑连接到同一LAN(Wi-Fi或以太网)。
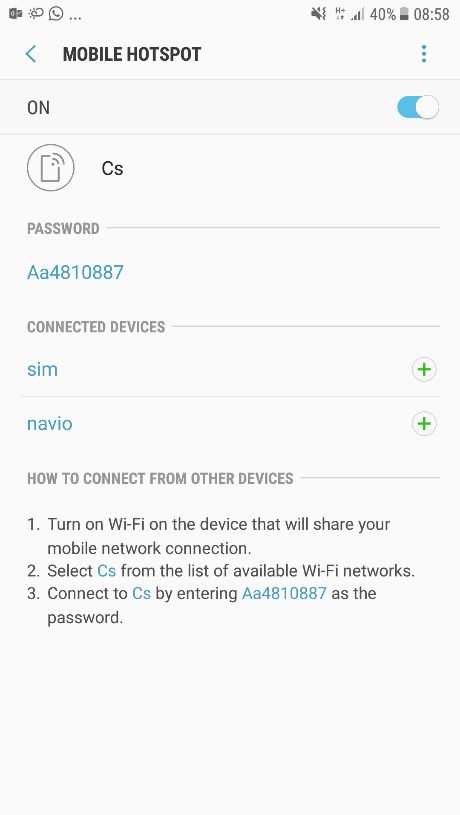
注意:使用移动或PC热点也与使用普通Wi-Fi相同。您可以通过手机或计算机监控连接到网络的设备。如果无法连接,您可以重新启动RPi3或重新检查您在文本文件中编辑的网络配置名称和密码(请注意它们区分大小写,如果实际上没有,则不应有额外的间距),并等到它连接(导航和你的电脑)并显示。
步骤51:7.0使用PuTTY在笔记本电脑上使用SSH Raspberry Pi
PuTTY是一种网络终端仿真器软件,可以使用您的笔记本电脑登录Raspberry Pi。如果你不想用你的笔记本电脑SSH你的Raspberry Pi,这很好,但这需要你每次想要进行配置设置时将Raspberry Pi连接到显示器和键盘,例如设置Ardupilot,或者设置GCS通信。如果是这种情况,您甚至不必执行Wi-Fi配置设置,也不需要任何互联网连接。只需直接通过显示器而不是通过PuTTY“设置Ardupilot”。
从下面的链接安装PuTTY并按照所有安装步骤操作。然后在您的PC上搜索PuTTY桌面应用程序并运行它。
步骤52:7.1
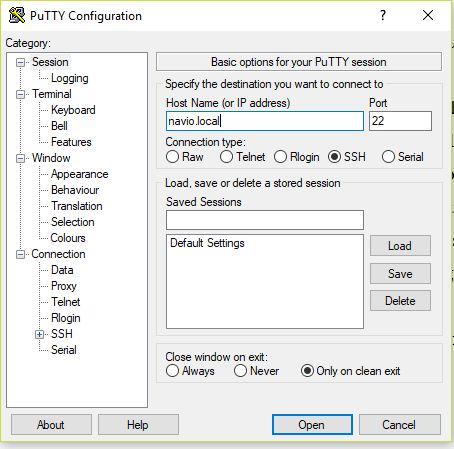
要连接PuTTY,请输入配置“navio.local”作为IP地址,然后输入(或验证)默认端口22,如图所示。重启PuTTY并尝试多次,如果它提示本地主机不存在的错误。如果情况仍然存在,请尝试断开对Raspberry Pi的供应,然后重新连接,即重新启动Raspberry Pi。
步骤53:7.2
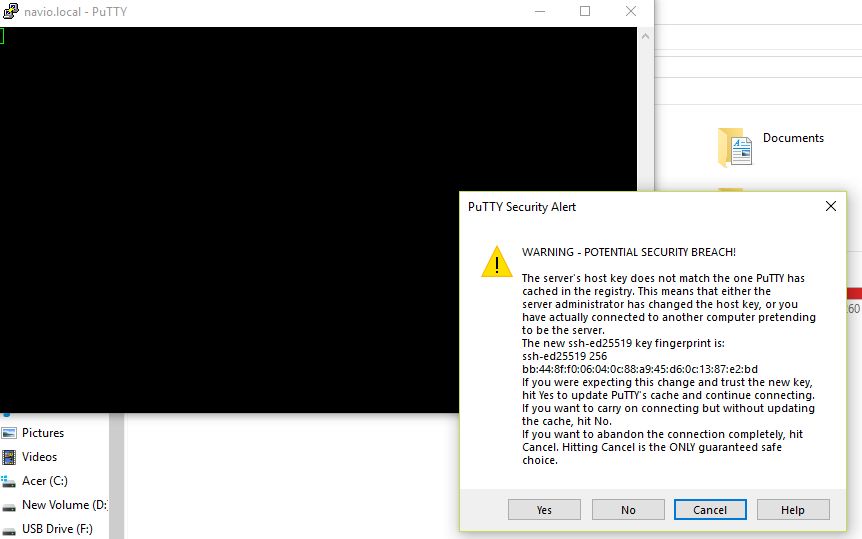
重复此操作,直到PuTTY启动,并提示您输入PuTTY的警告消息。点击“是”允许连接。然后,在输入默认的“pi”作为用户名和“raspberry”作为密码后,您将看到通过将Raspberry Pi直接连接到显示器所找到的相同界面,但这次是您的笔记本电脑的SSH。/p》
如果“本地主机不存在”错误仍然存在,则表示您无法将笔记本电脑和Raspberry Pi连接到同一个工作网络。尝试使用移动热点查看笔记本电脑和Raspberry Pi(设备的默认名称是否为navio)是否在已连接设备列表中。如果没有连接navio设备,请检查您的网络配置设置。
步骤54:7.3
整个设置步骤可参考官方导航文件:
https://docs.emlid.com/navio2/common/ardupilot/installation-and-running/
步骤55:8.0设置Ardupilot
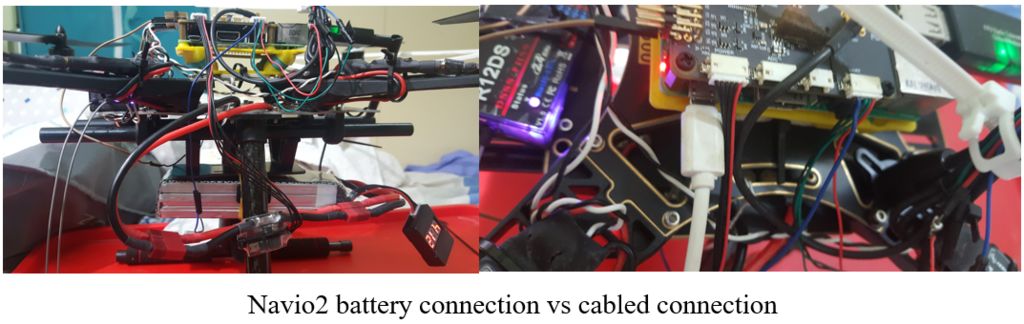
如果您通过电源模块从Li-Po电池为Raspberry Pi供电ESC也会为您的ESC提供动力,ESC将持续发出哔哔声,直到您完成校准硬件。如果您认为哔哔声很烦人,请使用microUSB线缆为电路板供电。但是,在以下步骤中不建议这样做,因为使用microUSB电缆会给校准过程增加物理上的困难。在飞行校准步骤中切换到电池连接可以解决问题。
步骤56:8.1
一旦连接建立后,输入默认的‘pi’和‘raspberry’用户名和密码将提供相同的简单界面,如下所示。如上所述,您可以通过笔记本电脑上的SSH(您必须将笔记本电脑和RPi连接到同一LAN)或直接通过显示器连接到此界面。
步骤57:8.2

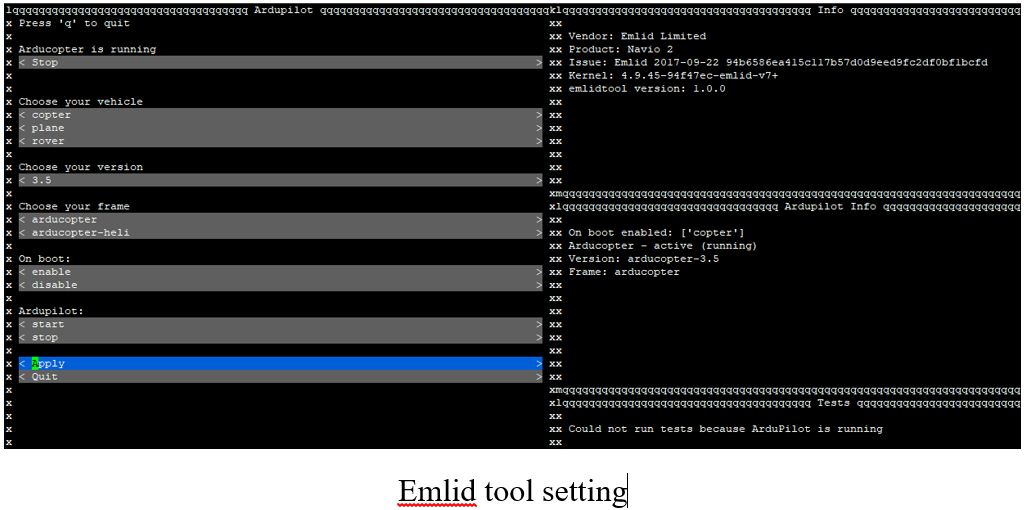
为了设置Ardupilot,必须通过命令选择车辆类型,版本和电路板“ sudo emlidtool ardupilot“。
如果要复制和粘贴,请使用右键单击(不是Ctrl-C和Ctrl-V),然后按Enter键运行命令。界面如下所示。通过选择您的车辆类型 - 直升机,Ardupilot版本,框架 - Arducopter,您是否希望Ardupilot在启动时启动 - 启用,启动Arducopter并应用。
步骤58: 8.3


然后,点击“q”退出。要检查是否在启动Raspberry Pi时启动ardupilot,将输入命令:“systemctl is-enabled arducopter”。
车辆设置的变化需要一个接一个地通过命令重新加载和重新启动车辆:
sudo systemctl stop arducopter
sudo systemctl daemon-reload
sudo systemctl start arducopter
或者不太优选,
sudo reboot
直接重启arducopter
步骤59:9.0连接到地面控制站(GCS)
地面控制站是您的笔记本电脑,配有Mission Planner等软件,用于实时监控航班。
您可以将四轴飞行器与地面控制系统连接起来站(GCS)使用LAN连接(udp连接),就像设置SSH通信一样。当您想要将无人机连接到GCS以执行简单任务(例如飞行前检查,飞行后分析或检索飞行数据)时,Udp连接非常有用。但是,为了监控航班,建议使用遥测模块对,因为它们更可靠(不依赖于网络连接强度),并且更容易连接。
对于udp和遥测连接,GCS通信需要一次性配置设置。输入命令以配置遥测网络通信设置:
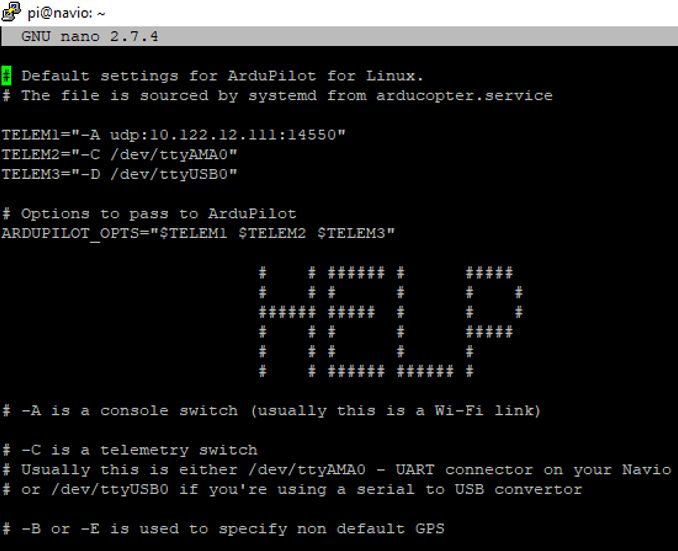
sudo nano/etc/default/arducopter
如果GCS将通过udp连接到Arducopter,即LAN连接,网络的IP地址,然后是默认的udp波特率,输入14550。
步骤60:9.1
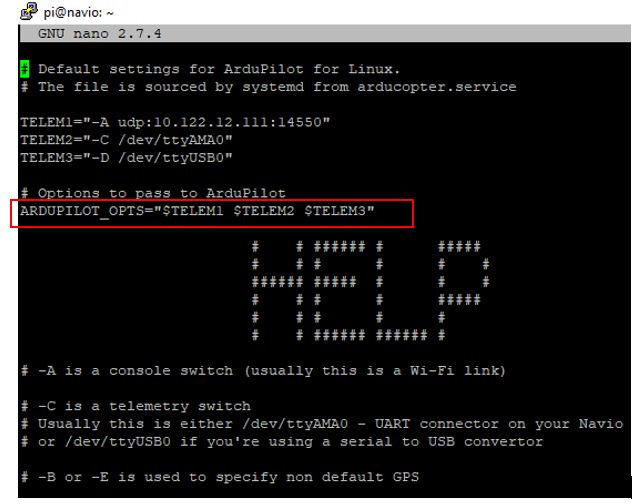
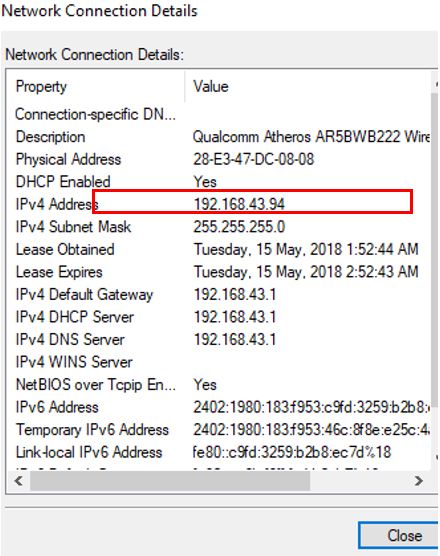
网络IP地址为从图中所示的网络和共享中心获得。以这种情况为例,我们将替换
TELEM1 =“ - A udp:10.122.12.111:14550”与
TELEM1 =“ - A udp:192.168.43.94:14550”
步骤61:9.2
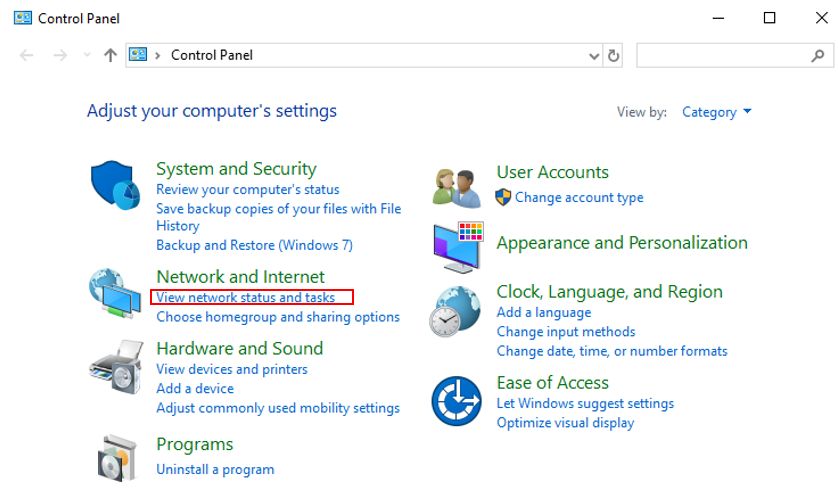
要打开网络和共享中心的网络连接详细信息,请转到控制面板并按“查看网络状态和任务“
步骤62:9.3
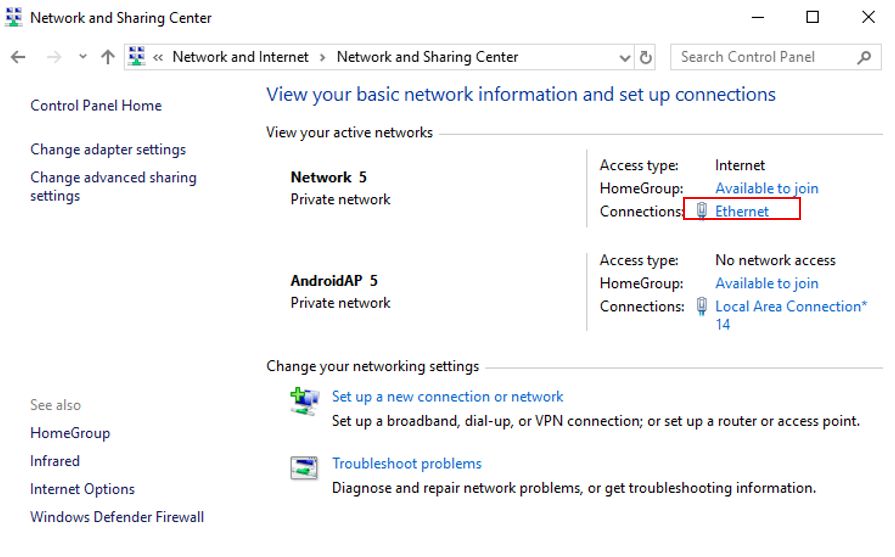
从网络和共享中心,选择常见的你已经连接了Raspberry Pi和笔记本电脑的局域网。网络地址取自上面显示的IPV4地址。
步骤63:9.4
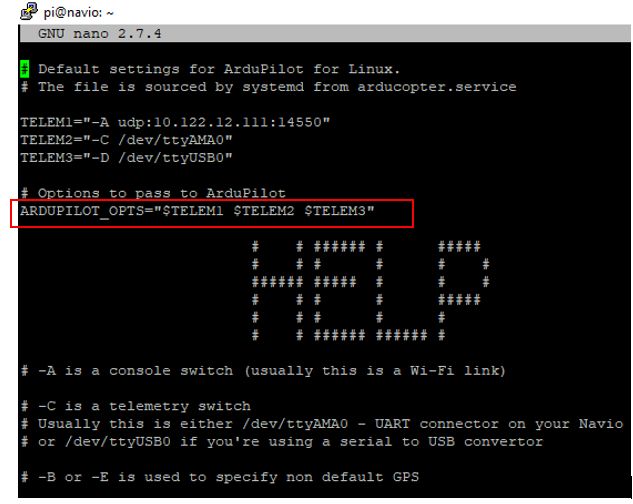
现在如果是GCS将通过一对遥测模块连接,第二行“TELEM2”已更新。只需通过删除行开头的#符号取消注释该行
TELEM2 =“ - C/dev/ttyAMA0”
如果USB遥测(通常是地面模块)是使用时,添加了第三行‘TELEM3’。这次将“USB”中的“AMA”替换为
TELEM3 =“ - D/dev/ttyUSB0”
通过将所有输入的“TELEM1”指定为“TELEM3”作为选项,可以建立上述任何类型的连接,而无需重新配置在此界面中。
步骤64:9.5
再次按ctrl-X离开,然后按‘Y’,然后按Enter键保存更改。然后,通过‘sudo reboot’重新启动Raspberry Pi。
使用的GCS软件是Michael Oborne的Mission Planner,它通过易于使用的界面支持各种功能。
步骤65:9.6
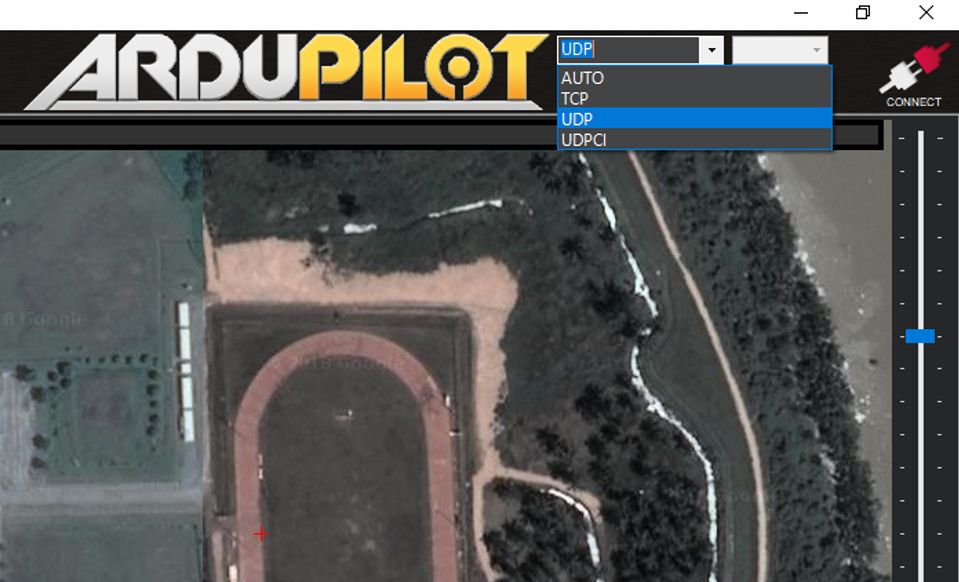
如果您使用通用LAN进行GCS-navio2通信,请选择在右上角(在您编辑遥测网络配置地址之后)UDP连接并点击“连接”。波特率将自动显示,参数将很快加载。任务计划程序左下角的航班数据值的变化将表示连接成功。如果mavlink连接耗时太长 - 在30秒倒计时之后 - 考虑重启Raspberry Pi,通过PuTTY上的sudo重启,或直接拔掉并重新连接到Raspberry Pi的供应。请注意,如果您的网络IP地址已更改但您尚未在上述步骤中更新遥测网络配置,则它将永远不会连接。查看网络和共享中心的IPV4地址!
步骤66:9.7
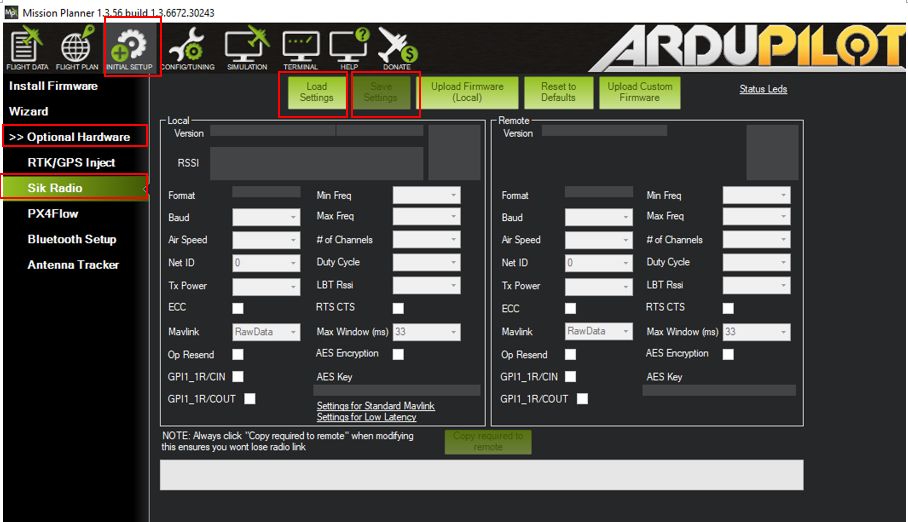
如果要连接使用遥测模块对,将空气模块插入navio2上的UART端口,将地面模块插入笔记本电脑,通过USB。等到两个模块上的LED指示灯停止闪烁(即发出稳定的灯光),然后转到初始设置》可选硬件》 Mission Planner上的Sik Radio。为此,您不必在此之前建立udp或任何连接。然后,按“加载设置”按钮并等待自动加载空白区域中的参数。处理完成后保存设置。然后转到另一个选项卡,然后回来查看paramteres是否仍在那里。如果此操作失败,请尝试重新启动RPi并尝试多次。
请注意,所有硬件连接都显示在“无人机硬件设置”部分中。
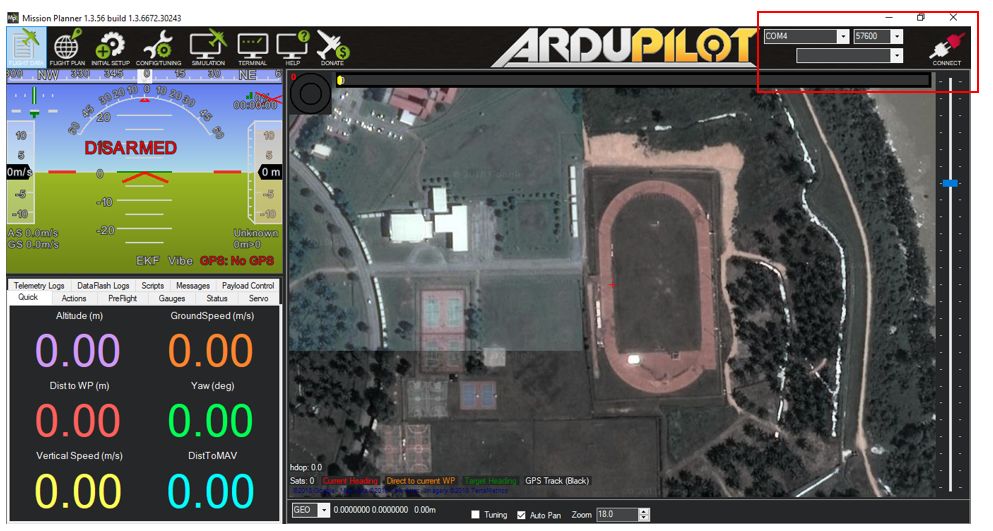
步骤67:9.8
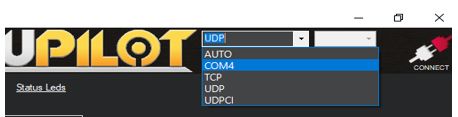

然后,将连接更改为COM4(波特率也将自动加载),然后点击‘连接”。遥测连接通常需要更长的时间来加载参数,但也应该在几秒钟内显示响应。再次,如果此步骤失败,请在重新启动RPi后重试。
步骤68:10.0任务计划程序(MP)上的飞行校准
如果我们连接Raspberry Pi通过电池供电的电源,而不是micro-USB电缆,esc将连续发出蜂鸣声,表示设置程序尚未完成,esc无法识别飞行控制器。只有在完成所有校准后,esc蜂鸣声才会停止。
飞行校准是在四轴飞行器可以为飞行武装之前完成的关键且必须的步骤。要继续,我们首先将Mission Planner GCS连接到上一步的无人机,通过udp连接,或通过一对遥测模块(推荐)。
没有必要完成以下步骤:设置向导,旨在指导新用户完成校准程序。校准步骤如下:
步骤69:10.1
1。转到初始设置选项卡》强制硬件》帧类型
步骤70:10.2
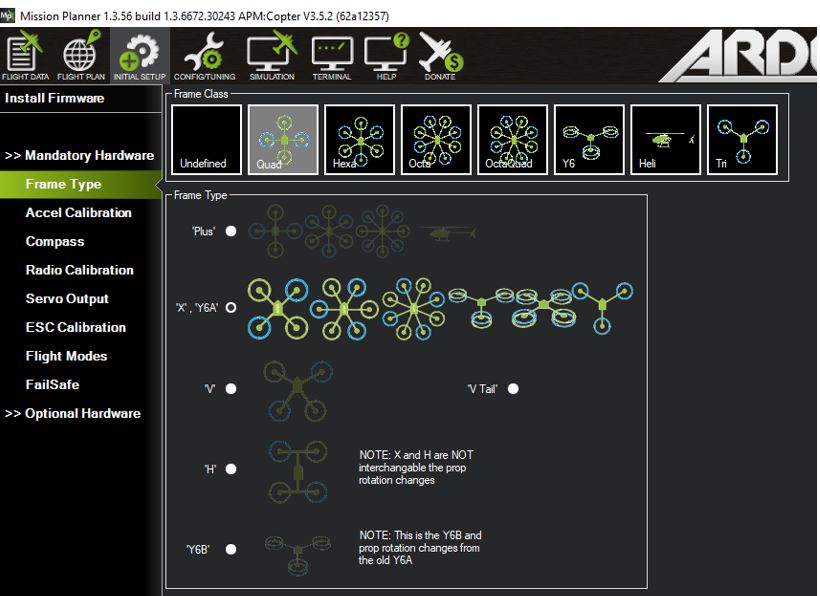
2。选择四轴飞行器机身类型 - X-frame。
步骤71:10.3
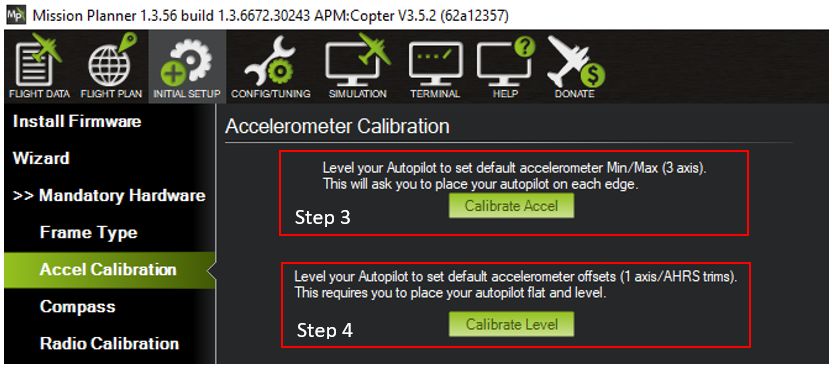
3。执行加速度计校准。只需将无人机放在平坦的水平上,然后点击“Calibrate Accel”。
步骤72:10.4
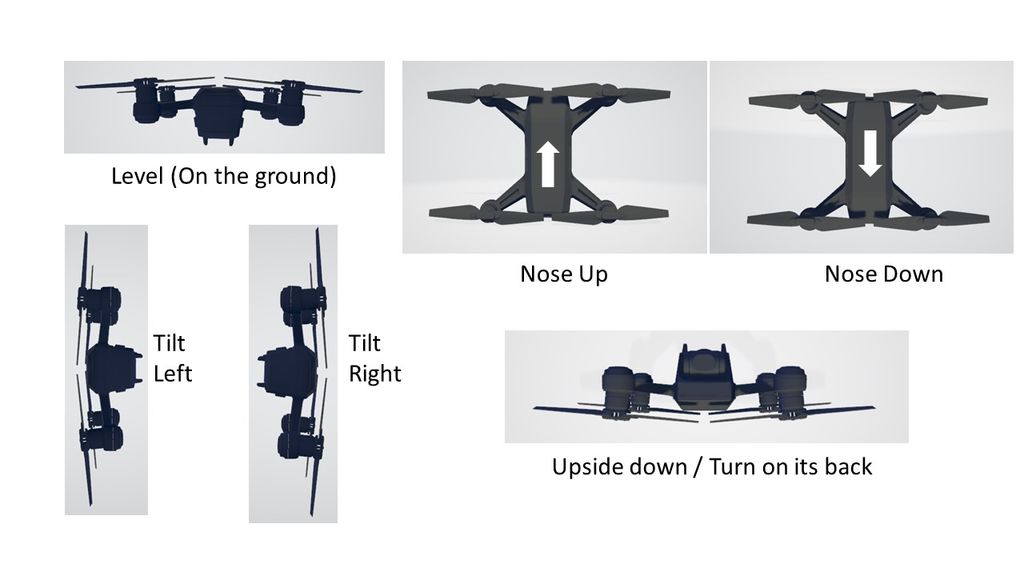
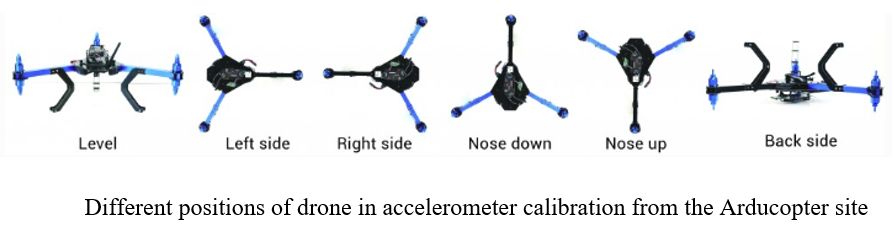

4。然后将四轴飞行器静止放置在平坦表面上以进行水平校准。根据指示倾斜的不同方向:在水平,在其右侧,在其左侧,鼻子向上,鼻子向下和在其背部,被校准。正确调整每个位置后按下按钮。如上所述,当您的RPi通过遥测无线连接到GCS并通过电池供电而不是使用LAN电缆或MicroUSB电缆供电时,此校准过程更加简单,因为否则四轴飞行器的运动将受到限制电缆。
此步骤将四轴飞行器的当前状态覆盖为水平和不同位置,并且每次从姿态指示器(如上所示)看到四轴飞行器未正确调平时都可以完成。
注意:遥测连接需要通过初始设置选项卡中可选硬件中的Sik Radio连接进行一次性配置,方法是在空气和接地模块的LED处于绿色,固态发射状态后加载设置。
步骤73:10.5
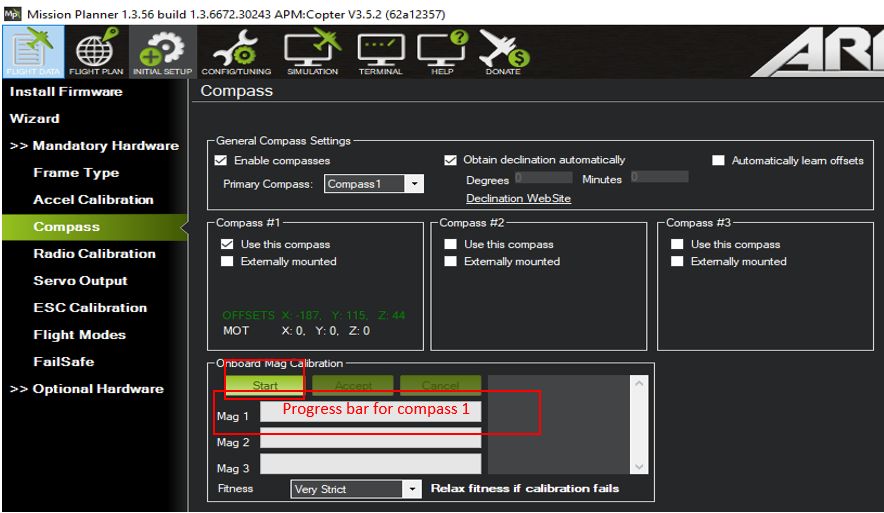
5。四轴飞行器标题的精度需要磁力计或罗盘校准,并通过移动四轴飞行器以覆盖3轴平面的所有方向来执行。要开始此操作,只需按下开始按钮,如下图所示。校准将开始收集所需的传感器数据,并且所选罗盘的校准进度显示在绿色进度条中。
步骤74:10.5.1
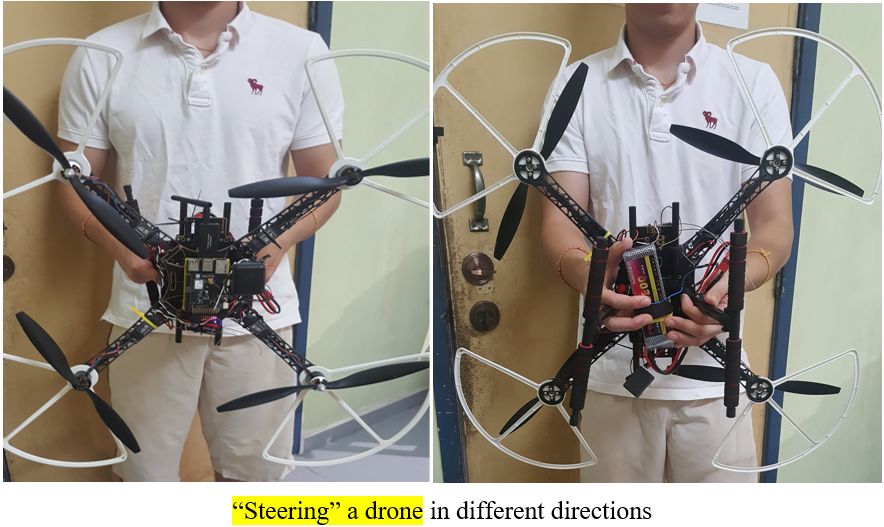
要校准指南针,请将无人机的顶部朝向您,并将其移动到圆圈中,就像您驾驶汽车超过一个周期一样。然后重复无人机顶部背离你的动作。然后,将无人机旋转到其水平面上,然后再将其颠倒旋转。 Ardupilot在磁力计校准上的视频演示如下:https://youtu.be/DmsueBS0J3E
步骤75:10.5.2
最后,进度条应该已经到达结尾,并显示一条消息告诉完成和将显示快速重启。
navio2飞行控制器中有2个内置指南针。如果使用指南针1和2(已选中)。它们都必须进行校准。如果任何指南针在校准时保持重新加载(绿色进度条在重复进行后再次重新开始),则取消选中有问题的指南针,即如果指南针2的进度不断重新加载则仅使用指南针1,如果指南针1指示则使用指南针2进度保持重新加载。
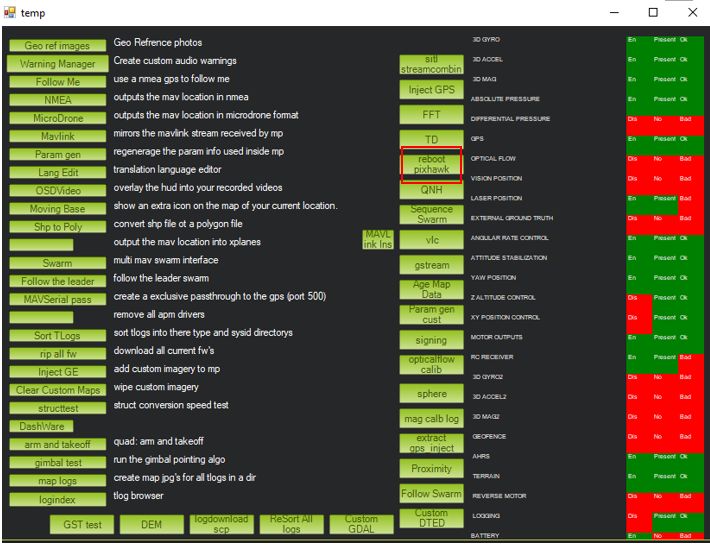
如果磁力计校准中出现问题,请不要使用设置向导。校准完成后,按Ctrl + F打开’temps‘并重新启动pixhawk,如图所示。
步骤76:10.5.3

重新启动后,为了查看新校准的罗盘偏移值,单击以转到任何其他选项卡,然后返回罗盘校准选项卡。对于所有被认为成功的方向,偏移值优选小于150(值以绿色显示)。如果值大于150(黄色或红色),请重新校准。偏移值过高可能会导致四轴飞行器无法通过预臂检查列表。
如果多次重新校准尝试产生类似结果,并排除了周围金属物体的干扰,请取消选中罗盘所有校准完成后,如果由于“罗盘偏移太高”而限制布防四轴飞行器,则需要预臂检查清单。这可以通过转到配置选项卡》标准参数》单击“查找”按钮并搜索手臂检查来完成。取消选中“全部”,然后单独重新选择除指南针以外的所有内容并写入(保存)参数。有时,即使您重新检查指南针作为预臂检查要求的一部分,由于指南针偏移导致四轴飞行器失灵也会消失。
步骤77:10.6
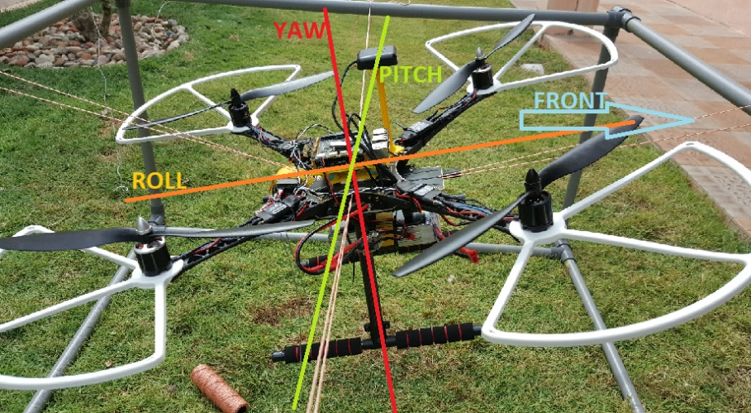
6。进行无线电校准,让飞行控制器(FC)知道每个无线电通道从发射器发送到接收器的PWM范围,然后FC才能将其转换为飞行控制动作。要开始校准,请点击“Calibrate Radio”按钮。然后,在所有方向上移动发射器上的左右杆,同时检查每个杆是否响应右通道,如下所示。左摇杆控制偏航(左和右)和节流(上下),右摇杆控制滚动(左和右)和俯仰(上下)。将每根棍子带到2个极端,以获得记录其PWM值的全部范围。当棒被推到极端时,指定无线电PWM范围的红色标记将扩展到侧面。如果棒子没有像所讨论的那样响应正确的通道,则必须对发射器进行修改,但是发射器通常只允许修改前4个以外的通道,这些通道是固定的
a 。频道1:滚动
b。频道2:音高
c。第3频道:节流
d。第4频道:偏航
注意:请确保变送器车辆设置为直升机,而不是其他类型的车辆。
步骤78:10.6.1



如果任何无线电信道的响应方向被反转,则通过发射机或任务规划器上的设置反转信道信号。例如,如果在按下右侧支架时,无线电配置中的音高显示为正,则可以反转该无线电频道。之后,所有可用的通道都通过将每个开关投向不同的方向来校准其无线电。
执行电机和ESC校准,以实现更好的功率传输和电机旋转。
步骤79:10.7
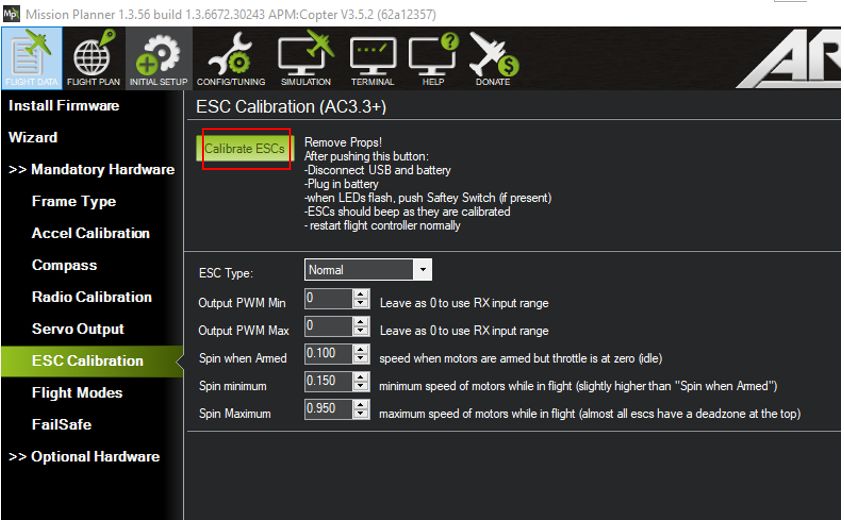
7。要执行ESC校准,请按校准ESC按钮。将变送器油门杆(左)完全向上推,启动飞行控制器。然后,过一会儿,拉下油门。长时间的哔哔声停止后,ESC校准将完成。如果蜂鸣声持续存在,请放弃校准并正常重启您的四轴飞行器,并至少使用油门。每次首次连接电源时都会进行一些ESC校准,并且会发出长哔声,FC LED会以读数和蓝色闪烁。
校准后,哔声消失。如果不是,那么校准步骤可能不完整。按照所有向导进行操作,以确保涵盖所有必需的校准和设置。还要检查所选的帧类型是否正确。
步骤80:10.8
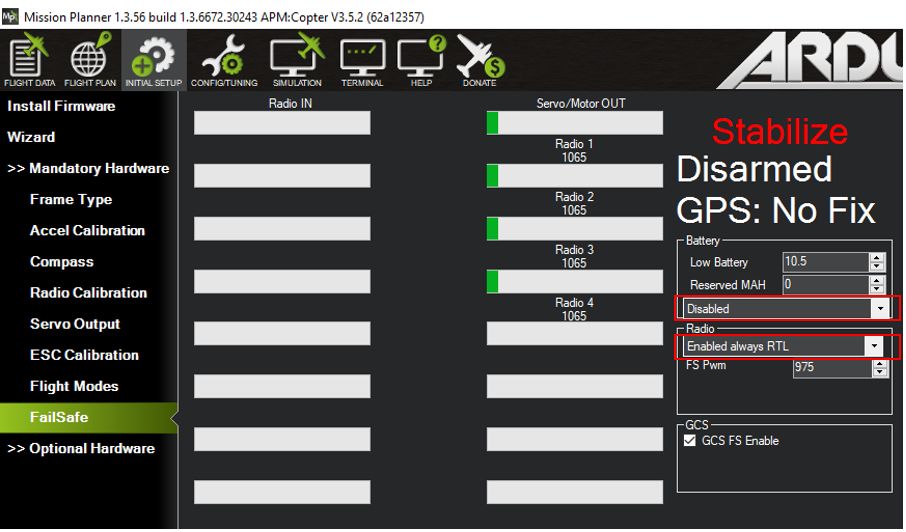
8.故障保护
建议将四轴飞行器的故障保护设置为在低电路板电压下着陆(除非FC测量的电路板电压不准确。使用BB警报器更方便,更方便.BB警报器连接到锂电池电池,每当电池电压触发警报低于指定限制的电池电压可以通过BB报警器上的简单按钮轻松设置触发报警的电池电压。可以安全地将其设置为3.2-3.4V,其中任何一个如果电池跌落到阈值以下,你将会惊慌地降落四轴飞行器。
无线电通信是一个至关重要的部件,它的失效会导致你的四轴飞行器永远消失。不要使用可能干扰无线电的组件通道频率并始终检查变送器电压和功能。通过设置无线电通信的故障保护来保护您的四轴飞行器每当无线电通信丢失时四轴飞行器将返回发射(RTL)的统一。
四轴飞行器只能在所有安全预臂检查完成后布防,其中还包括以上所有内容飞行校准步骤。
步骤81:11.0更改任务计划器中与无线电发射器通道相关的飞行模式
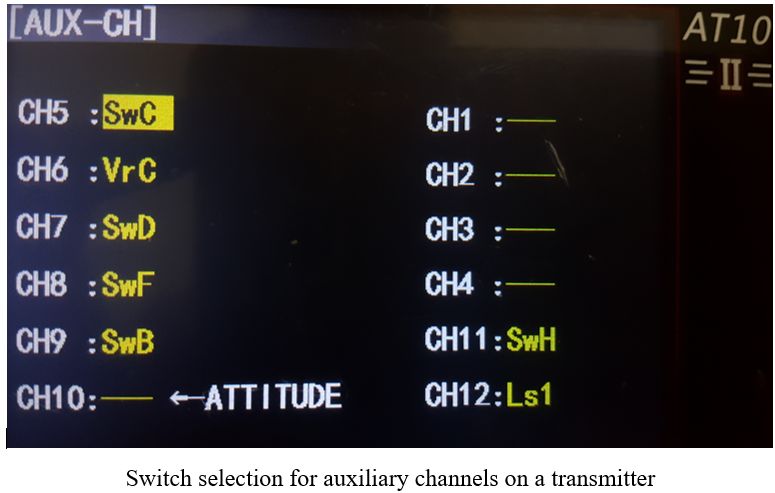
如上所述,主要通道(通道1至4)对于所选择的特定类型的车辆是固定的。另一方面,辅助通道可根据我们的需要进行更改。不同的发射器具有不同的辅助信道设置方法。每个通道由变送器上的开关控制。我们需要做的就是将频道的切换更改为我们想要用来控制特定频道的特定开关。
步骤82:11.1
无线电发射器上的无线电频道设置必须与任务规划中的设置配合,您的四轴飞行器所持有的实际模式将如任务规划器所示(不在您的无线电发射器中显示)。
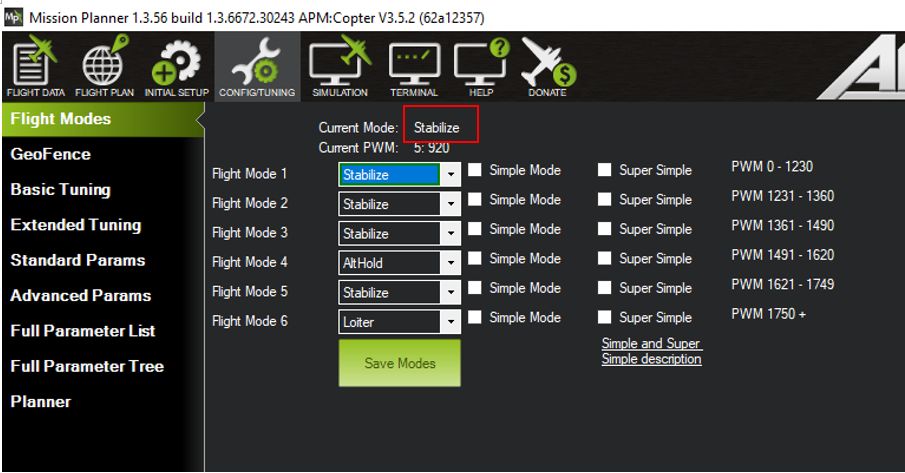
要转到Mission Planner上的飞行模式设置,请将GCS连接到您的四轴飞行器(通过udp或遥测),然后转到配置》飞行模式。 Mission Planner中的飞行模式设置使用收音机中的固定和默认频道5。我们的目标是在5频道的PWM范围内,我们希望利用Mission Planner提供的6种飞行模式切换中的大多数。
因此,在您的无线电发射器上,更改辅助通道,通道5,由合适的3路开关控制(如果有的话)。将您的开关扔到不同的位置,以测试在不同位置使用的飞行模式。我在通道5的3向开关接合飞行模式1(当开关位置在底部时),飞行模式4(当开关位置是中间时)和飞行模式6(当开关位置在顶部时)。现在更改Mission Planner,从下拉列表中选择我们希望四轴飞行器参与的模式,即在我的情况下,选择飞行模式1,4和6的模式。
现在尝试查看显示的当前模式,以便在将开关拖到不同位置时查看更改。例如,在我的情况下,当前模式将从稳定(底部)变为高度保持(中间)和上升(上)。
如果您的无线电发射器仅具有双向开关,请不要担心。将2种飞行模式用于您认为对您最重要的模式。我建议Stabilize(基本的)和Altitude Hold(重要的是如果你不是专业控制油门)。
步骤83:11.2
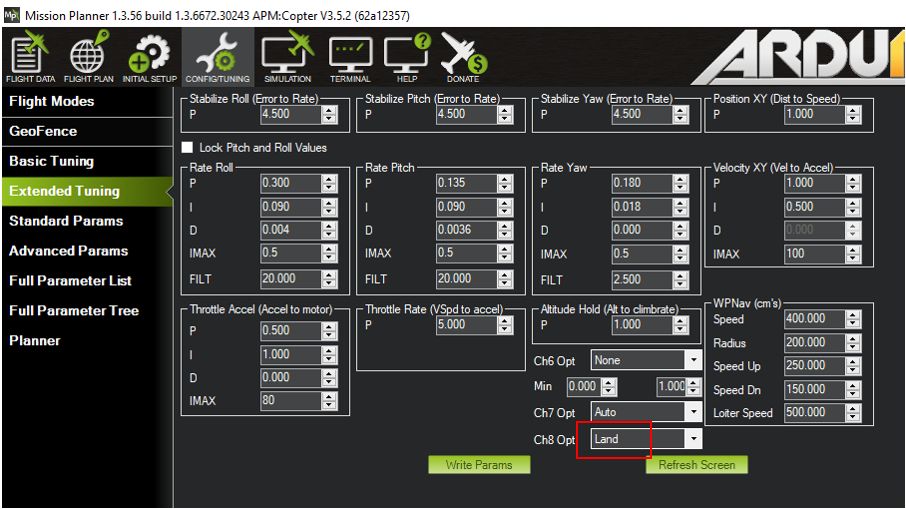
登陆四轴飞行器同样具有挑战性,您可能也希望包含它。我建议从单独的通道设置Land模式,这样你就可以将通道5单独留给其他模式。只需转到配置》扩展调整以获取其他通道的模式设置
步骤84:11.3
再次,将您的无线电发射器上的设置与Mission Planner上的设置相匹配。例如,我们首先确保我们将通道8设置为我们想要用于降落四轴飞行器的开关(双向),然后在任务计划器上,我将通道8选择为Land。土地将是优先于所有其他模式的优先模式。这意味着如果我的通道5设置为稳定(比如底部的开关C),并且我的通道8设置为着陆(比如开关F打开),则四轴飞行器将用于Land。请注意,四轴飞行器接合的实际模式显示在配置》飞行模式中显示的当前模式中。从那里,总是测试你设置的开关的不同切换,以查看四轴飞行器是否真正参与你想要的模式。如上图所示,通道6和通道7还有2个通道,您可以使用这些通道进行其他所需的飞行模式。
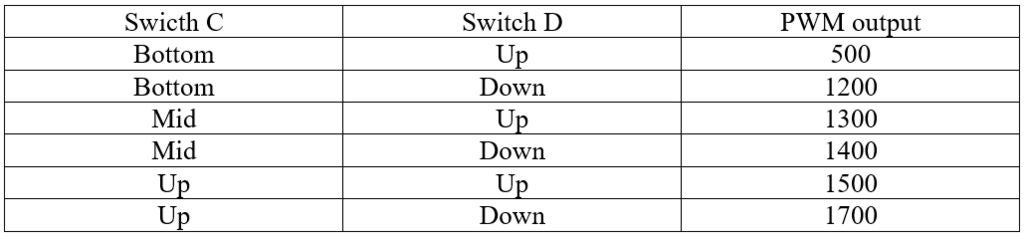
特定开关位置的通道PWM值如下所示飞行模式。不建议使用您自信的旋钮,因为很难测量位置和精确的PWM输出。
某些无线电发射器允许开关的逻辑控制来控制单个通道。这意味着可以使用2个开关来控制,例如通道5用于更多输出。上面的示例仅用于更好的说明。此设置可以在逻辑开关下的无线电发射器(如果有此功能)上完成,对于每个发射器可能不同。花一些时间来了解如何执行设置。
步骤85:11.4

但是,它是不建议使用逻辑开关,除非您有信心,因为它可能很容易因切换的复杂性而引起混淆,并且在恐慌时可能很危险。为了安全起见,请始终使用单个3向开关,并在无线电发射器上制作清晰的标签,以适应不同开关将要使用的不同模式。这有助于您能够立即响应紧急情况,例如降落四轴飞行器或解除故障模式,而不必确定要控制哪个开关。
步骤86:11.5
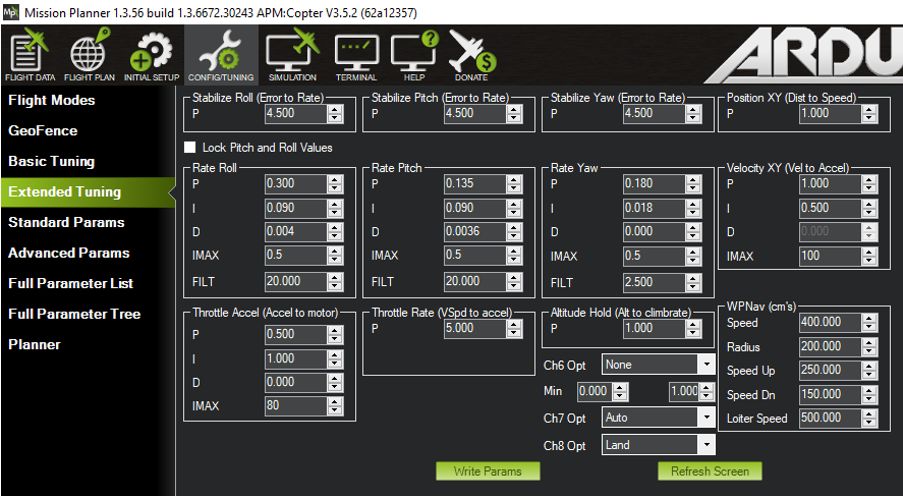
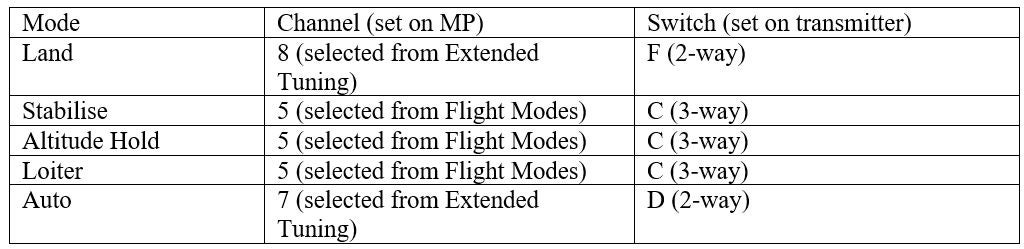
以上显示我的开关设置摘要作为参考示例供您参考基于上面的MP(扩展调整)图。您可以考虑设置的3种基本模式是Land,Stabilize和Altitude hold。
步骤87:11.6
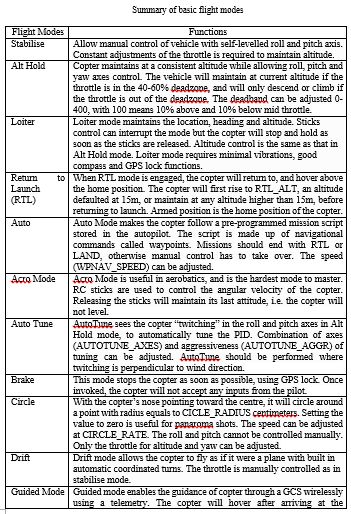
了解不同的重要飞行模式
在您的变送器和Mission Planner(连接到您的无人机)上设置飞行模式后,您将不再需要连接到MP了除非您想监控航班,否则启动航班。但是,请确保您没有切换到的模式!
步骤88:12.0安装关闭开关到RPi3
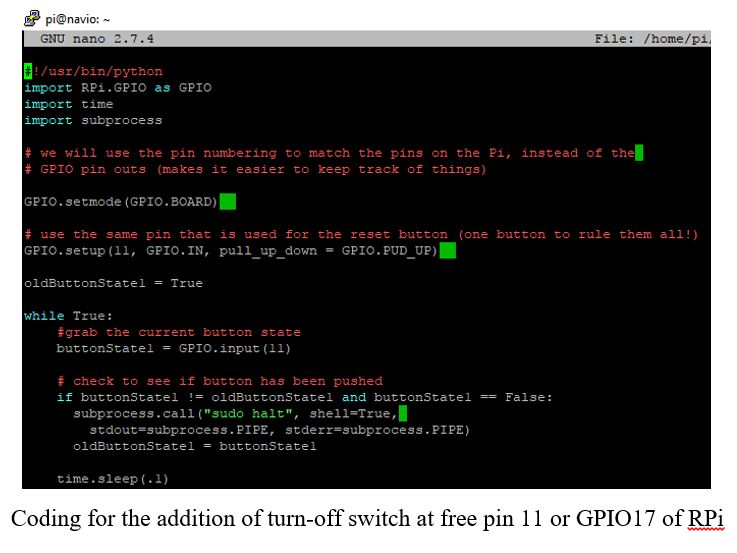
要关闭Arducopter,需要sudo halt命令。与PC类似,从长远来看,没有正确关闭设备可能会破坏存储。因此,安装了一个开关,并且在RPi启动时正在执行用于关闭设备的开关操作的程序。硬件组件设置部分正在讨论交换机安装细节。
Raspberry Pi一旦从电池接收电源就开始启动。但是,在适当地关闭它时会有一些麻烦。
我们都知道,Raspberry Pi微型计算机的适当关闭与正确关闭PC一样重要。关闭只能在登录Raspberry Pi后执行,可以通过键盘或鼠标和显示器的正确连接,也可以通过PuTTY安全地连接到笔记本电脑(SSH)。通过拔出电源强制关闭可能会导致SD卡长期损坏。
因此,使用Raspberry Pi的一个免费GPIO - Navio2 Flight控制器没有使用它 - 为Raspberry Pi安装一个关闭开关。只能使用3个免费GPIO,即GPIO 17(引脚11),GPIO18(引脚12)和GPIO 26(引脚37)。想法是编写一个在Raspberry Pi中启动时运行的程序,例如,每当GPIO 17(引脚11)短路到地面时(通过瞬时按钮开关),Raspberry Pi将运行命令自动关闭。
要向Raspberry Pi添加关闭按钮,只需按照以下链接中的 ETA Prime 进行操作即可。这对每个人来说都非常简单易行。
可以使用记事本或写字板打开RetroPie文本文件的内容,并逐个复制文本文件中的命令,进入pi @ navio命令界面,如下图所示
步骤89:13.0运行自治任务

请如果这是您第一次布置四轴飞行器,请先参考手动飞行。
要测试,首先要找到一个宽阔且空洞的空地,几乎没有障碍物或树木。随身携带您的笔记本电脑(Mission Planner),您的无人机以及所有必要的设备(如发射器,备用螺旋桨,扳手,如果需要可以拧紧电机盖,如果需要还可以使用电缆扎带等)到空地。将遥测地面和空气模块分别连接到笔记本电脑和飞行控制器。确保遥测连接已按“连接到地面控制站”部分进行配置,在地面和空气模块具有相同的实心LED指示灯(不闪烁)后,按右上角的“连接”。
在Mission Planner上,转到“飞行模式”选项卡。使用鼠标可以更轻松地浏览地图。鼠标滚轮可用于放大和缩小地图,然后使用左键单击拖动地图以交互方式导航到任何方向。弹出对话框将询问您是否要将无人机的当前坐标设置为Home位置(无人机起飞的点)。按’是‘即可。这样,地图上的四轴飞行器图标(您的无人机位置)将与地图上的“H”图标(家庭位置)合并。
将GPS天线正确连接到飞行控制器上的MCX接口(请参阅组件设置),Google地图将自动加载无人机当前所在的地图。请注意,主页按钮(“H”图标)作为当前无人机的位置(四轴飞行器图标)加载,即“H”图标必须与四轴飞行器图标重合。否则,按上面的“家庭位置”进行操作。
步骤90:13.1

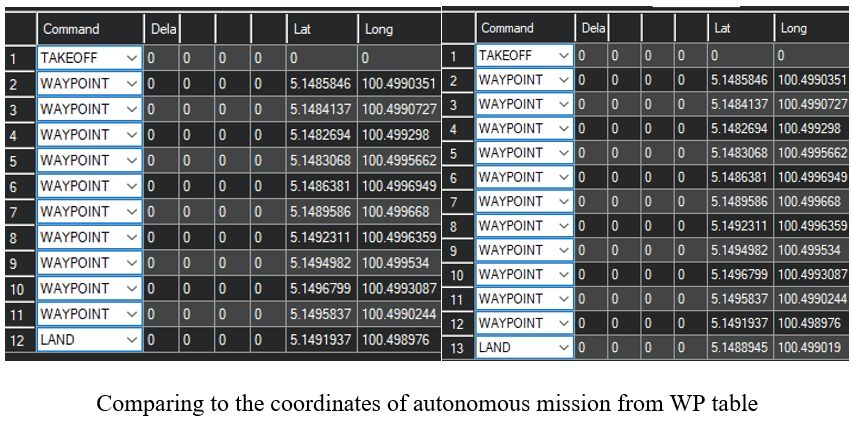
接下来,在地图上,通过单击您希望无人机跟踪的点(WP)执行路径规划或任务规划,如下所示,一个WP接一个。
步骤91:13.2

在路径规划期间,会自动生成WayPoint表。 WP表包含每个选定WP的位置坐标以及我们希望无人机在特定WP上执行的命令。将光标移动到地图和表格之间的行,然后向下拉以放大相对于表格的地图。
步骤92:13.3
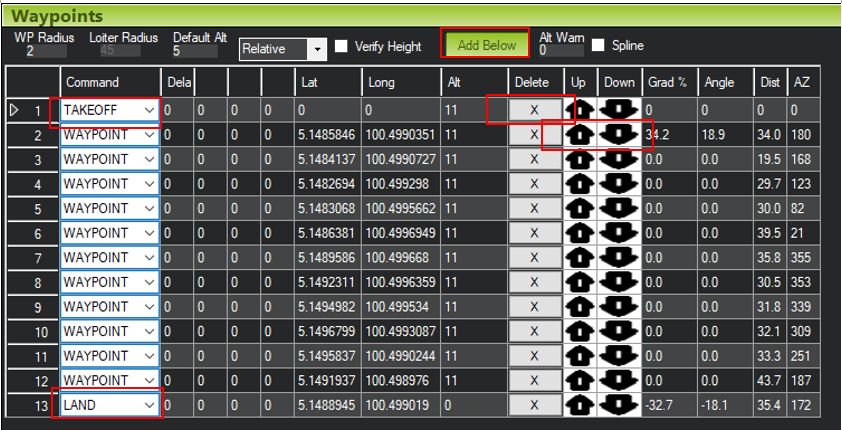
要使无人机执行完整的任务,请在第一个WP上方添加WP,并将新的第一个WP的命令更改为“TakeOff”。要添加WP,请单击下面要按顺序插入WP的行,然后按“添加到下面”。 WP将添加到行下方,并按向上或向下箭头以交换WP的序列。将’TakeOff‘WP移到顶部。然后,在最后一个WP下面添加另一个新WP,并将新的最后一个WP命令设置为“Land”。 WP表的一个示例如上所示。
要删除WP,请单击“X”,整个行将被删除。
步骤93:13.4

确保您的无人机不会碰到任何物体,如树木,柱子等靠近计划的路径,避免完全靠近他们的任何WP。将所需高度设置为合适的值。建议自主飞行的离地间隙至少为5米。将它设置得更高,以克服树木,灯柱和其他物体。还要确保飞行路径已完成,并且没有WP超出区域。在这方面要非常小心,因为有时候不希望的WP会出现在中间,并且会通过延伸到其他位置的黄线显示,确保在执行任何操作之前删除错误的WP。
步骤94:13.5
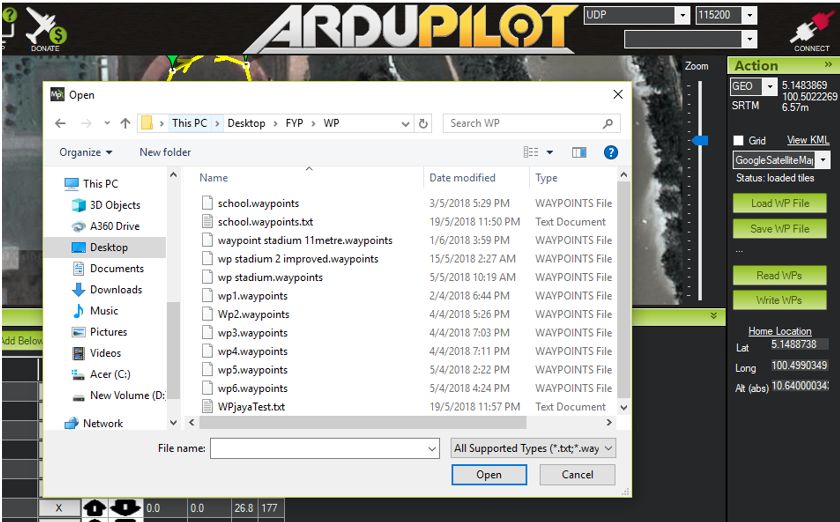
在如上所示的操作面板上,有4个重要的操作,即保存,加载,读取和写入。任务计划程序上生成的任何WP表都可以作为文本文件(WP文件)保存到PC中,以便在您希望运行相同任务时将其加载到任务计划程序。要加载已保存的WP文件,请按“加载”按钮并指向保存WP文件的位置并将其打开。 WP表将加载到您的Mission Planner。仔细检查加载的任务是否真的是您打算运行的任务。然后,按“写入”按钮将WP表保存在Mission Planner上。之后,按“读取”将WP文件发送到飞行控制器,以便无人机将跟踪路径。这要求无人机通过遥测模块与GCS连接。在“读取”之后,任务计划程序将再次询问您是否要将“主页”位置(“发射位置”)设置为当前加载的无人机坐标。按“否”以维护WP文件。多次执行读取以确保无人机被告知该做什么。
步骤95:13.6
当“读取”完成后,将左侧油门杆(零油门)完全向右推并按住,将无人机穿过发射器。您的无人机现在应按照提到的方式放置,以便加载的坐标与归属位置一致(如果它们位于地图上的不同位置,请按“归属位置”按钮执行此操作)。你的无人机不会在自主模式或陆地模式下武装。在你武装之前先切换到稳定模式。有关不同飞行模式之间切换的详细信息,请参阅“更改任务计划程序中的飞行模式”部分。在无人机布防后,立即进入自主模式,然后轻轻推动油门以启动自动模式。无人机将自动起飞到选定的高度,然后开始移动到第一个和后续的WP。
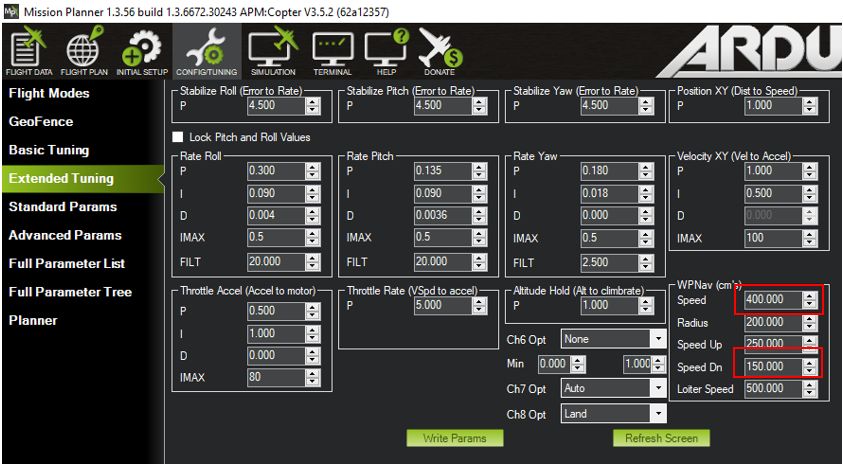
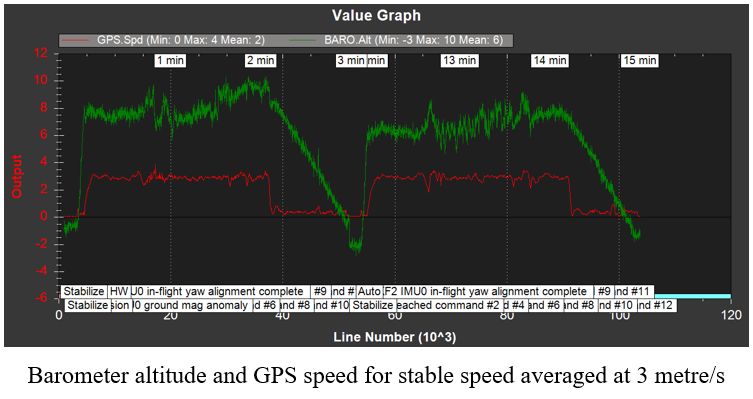
无人机飞过WP的速度可以通过搜索完整参数列表进行设置和编辑WPNAV_SPEED参数。在配置选项卡》扩展调整上更容易完成,如下所示。速度400.000表示您的无人机设置为以每秒4米的速度水平移动。如果您对GPS精度没有信心,请将速度设置为小于每秒3米。
着陆速度同样重要。通过搜索和编辑LAND_SPEED参数,可以在完整参数列表中设置陆地速度。当无人机即将接触地面时,着陆速度是垂直最终着陆速度。该值最好设置为低至10 cm/s。无人机的垂直下降速度(最终触地之前)是从完整参数列表中的WPNAV_SPEED_DN设置的。如果您没有信心,或者您有气压计感应误差,请将下降速度设置为低至10 cm/s。同样,在扩展调谐选项卡上可以更容易设置,其中下图所示的“速度Dn”意味着四轴飞行器将以1.5米/秒的速度下降,然后在设置的LAND_SPEED下降至最终的降落速度。请记住点击“写入参数”按钮以保存任何更改。
步骤96:13.7

在中途飞行中脱离自主模式可能具有挑战性。如果你是新手,没有经验,你不会想要这样做。但是,如果在飞行途中发生错误,例如无人机移动速度太慢,或者您发现自己选择了可能击中物体的WP,或者您没有将无人机设置为最后一个WP或合适的地点等。不要切换到陆地模式,因为无人机可能从天而降!在切换到稳定模式之前,将油门推到油门中间水平以上。准备控制油门,以防止它从天空中直线下降。在降落无人机之前将它飞到安全地带。如果您已经在变送器上预先设置了Loiter模式,让它从自动模式恢复控制,则在Loiter模式下更容易控制,因为它包括Altitude Hold。
路径规划完成后,你的无人机将在最后一个WP降落,一旦接触地面,油门就会自动关闭。如果没有,请完全拉下油门并启动稳定模式,然后手动撤防无人机。在节气门零位置将油门杆完全推到左侧,解除无人机的武装。
步骤97:14.0手动飞行控制

确保您已完成前面步骤中的所有校准和设置。确保您已在变送器和Mission Planner上设置了所有基本所需模式,例如Stablise,Altitude Hold和Land。有关更多详细信息,请参阅“更改任务计划器中关于无线电发射器通道的飞行模式”。
将四轴飞行器放置在宽阔的空地上的平坦地面上,然后插入电池。等到长长的哔哔声停止。然后通过将油门杆完全向右推到零节气门位置来操纵四轴飞行器。如果这是您第一次操纵四轴飞行器,您将确保电机旋转方向正确。将螺旋桨关闭,然后用手指感觉每个电机的旋转方向是否正确。否则,在特定的ESC和电机之间互换任何2个连接(子弹连接器)。请参阅“无人机硬件设置”部分中的电机设置。
步骤98:14.1
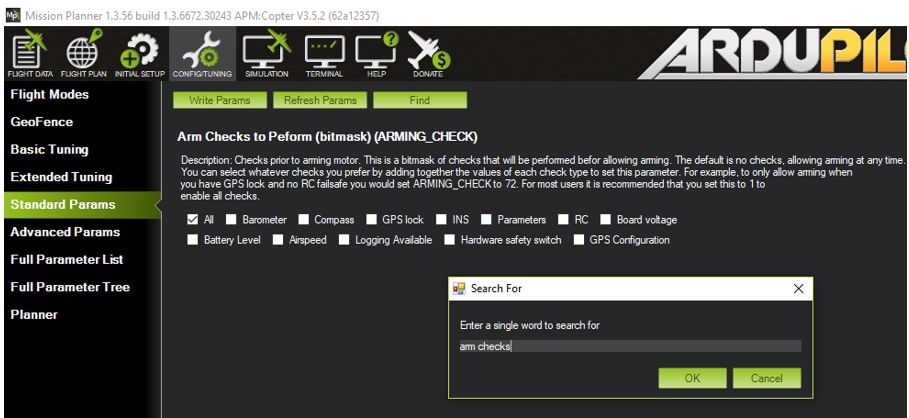
如果你的四轴飞行器无法武装,将您的无人机连接到任务计划器,以查看导致预臂检查触发的原因。例如,如果罗盘偏移太高,则需要重新校准磁力计。谷歌搜索预臂检查错误消息,然后是关键字“Ardupilot”(例如:指南针偏移太高Ardupilot),以寻找解决错误的方法。
通过进入配置选项卡》标准参数》单击‘查找’可以选择性地禁用预臂检查’ s组件。按钮并搜索手臂检查。取消选中‘全部’然后单独重新选择除故障组件之外的所有组件,然后按‘写参数’保存。确保在确保故障组件不会导致崩溃后执行此操作。
步骤99:14.2

在你的四轴飞行器装备后,即电机以最低速度旋转时,轻轻地向上推动油门,直到看到你的无人机开始升起,给予更大的推力以帮助它升起并升空。在您想要的高度,切换到海拔高度保持高度。如果您希望无人机在保持相同高度的同时保持当前GPS位置,请切换到Loiter模式。当你切换到这些模式时,你的无人机应该保持在最后的高度。如果它下降或下降,你仍然可以向上推油门以控制飞行。
如果你不想使用高度保持模式,请确保你有信心通过不断推动高度来控制高度。油门下降时油门向上,当油门上升时油门向下推,同时控制四轴飞行器的俯仰,滚转和偏航。建议您在驾驶自建无人机之前先用更便宜的中国无人机测试您的飞行员技能(无海拔高度保持)。有些无人机具有内置的高度保持能力,学习这些无人机无助于掌握手动控制无人机高度的技能。
你的无人机可以开始水平移动你的无人机在空中有适当的离地间隙。你的无人机绕三轴旋转移动:
1。向左滚动并向右滚动(请参阅变送器控制图)
2。向下俯仰,向上俯仰
3。偏向左(逆时针)并向右偏航(顺时针)
步骤100:14.3
确保始终监控电池电压使用BB警报电池电压监视器。警报触发后立即降落四轴飞行器。垂直着陆速度可以与下降速度一起调整,如“运行自主任务”部分所示。如果您不想使用陆地模式,请通过上下控制油门杆慢慢将四轴飞行器下降到地面。这又需要很多练习来掌握完美的着陆。一定要先试试更便宜的无人机。
一旦你的四轴飞行器接触地面,油门就会自动关闭。如果没有,请完全拉下油门并启动稳定模式,然后手动撤防无人机。在油门零位置将油门杆完全推到左侧,解除无人机的武装。
步骤101:15.0数据闪存日志分析
飞行后分析告诉您有关您的航班的所有信息,包括晴雨表高度,GPS位置,卫星接收,电池电压,姿态响应,所需姿态,无线电通信,速度,电机电流,以及飞行路径的3D图像和模式。
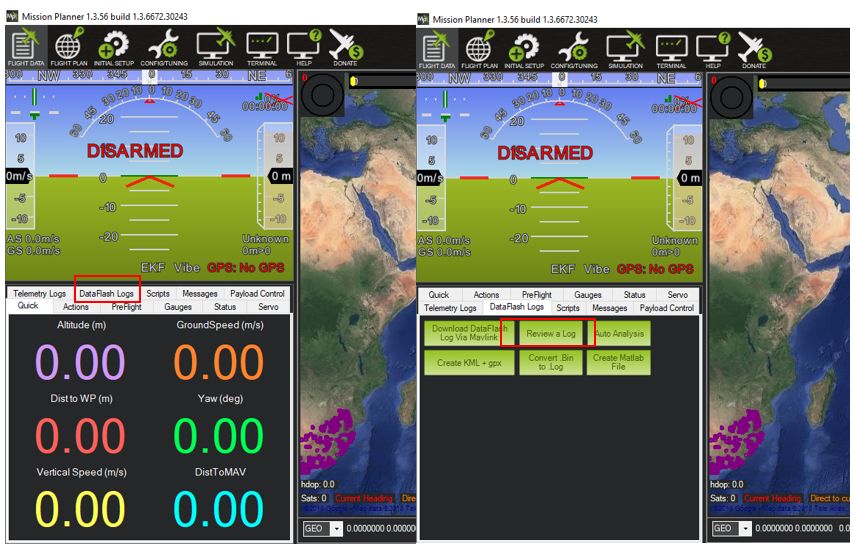
要从Mission Planner加载数据闪存日志,您不应通过无线电遥测将Mission Planner连接到无人机。相反,您需要通过将两者(RPi3和您的笔记本电脑)连接到同一LAN来建立udp连接,并执行必要的遥测网络配置,如“连接到地面控制站”部分所示。
Next ,按下如上所示的数据闪存日志选项卡》通过Mavlink下载DataFlash日志》,然后选择要分析的航班日志文件(基于准确的时间和日期)》下载所选文件。下载的日志文件将存储在您的PC中。
步骤102:15.1
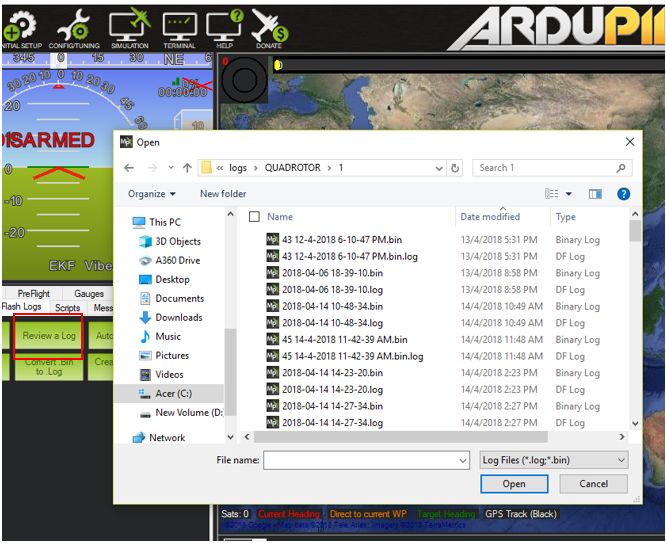
下载的二进制日志文件可以加载到Mission Planner进行分析,而无需连接到无人机。只需按“查看日志”,然后打开即可根据记录的时间和日期加载所需的航班数据。
当您想查看闪存日志时,将自动定向到闪存日志的存储位置。否则,可以在
C:\ Users \ Username \ Mission Planner \ logs \ QUADROTOR \ 1
中找到它们。
步骤103:15.2
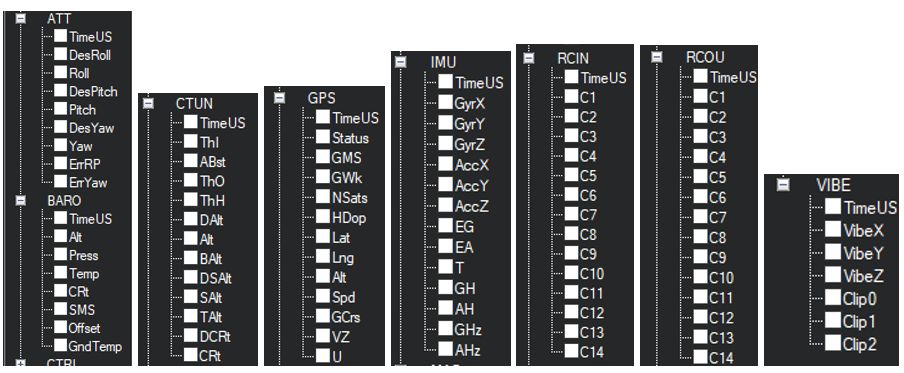
双击选定的二进制日志文件以打开闪存日志。从闪存日志中,数据闪存日志中的一些常用且有用的参数包括:
1。态度
一个。所需的滚动/俯仰/偏航:您从无线电中获得的预期姿态或偏航值
b。侧倾/俯仰/偏航:通过车载传感器测量的实际姿态和偏航响应
2。 BARO
一个。 Alt:晴雨表高度感应
3。 ThO:输出油门值
4。 GPS
一个。 NSats:卫星接收次数
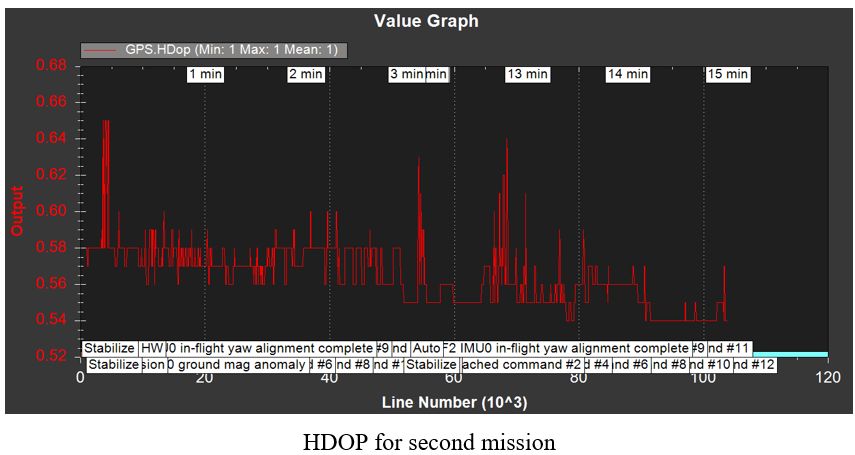
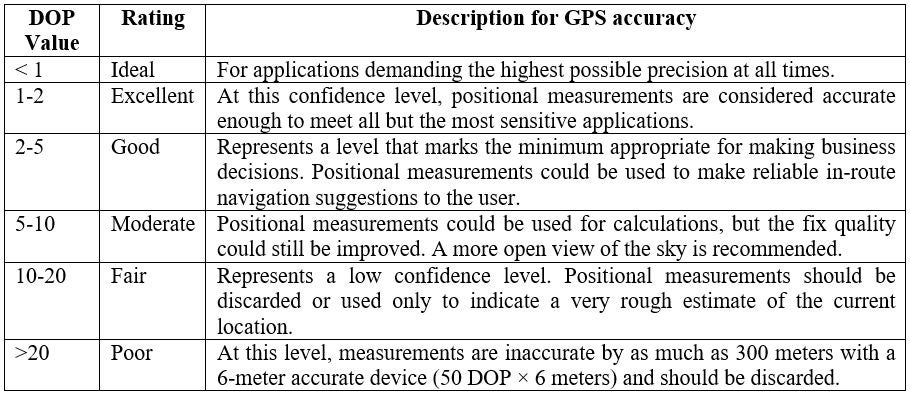
b。 HDOP:精确度的水平稀释以告知GPS精度
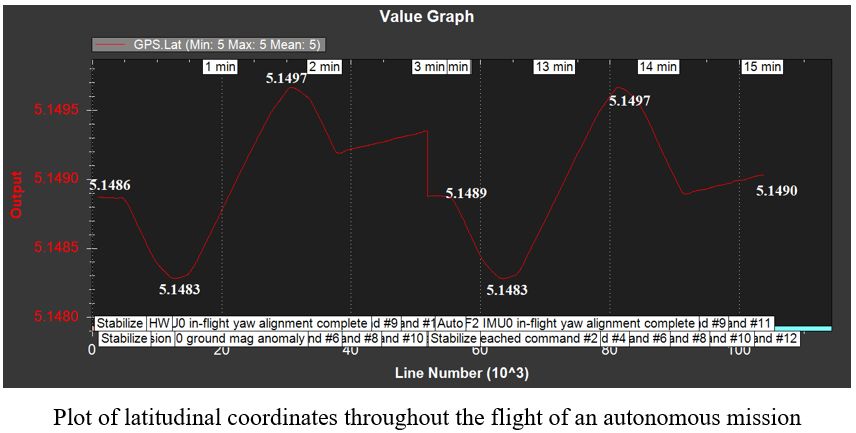
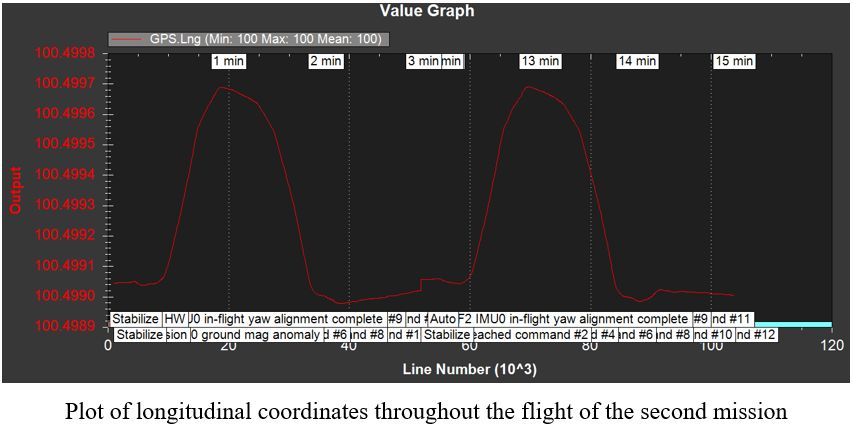
℃。 Lat:整个飞行过程中的纬度坐标
d。 Lng:整个飞行过程中的纵向坐标
e。 Alt:GPS测量的高度
f。 Spd:速度
g。 GCrs:地面课程(四轴飞行器的标题)
5。 IMU
一个。 Gyr X/Y/Z:陀螺仪IMU数据
b。 Acc X/Y/Z:加速度计IMU数据
6。 RCIN:输入无线电信道值
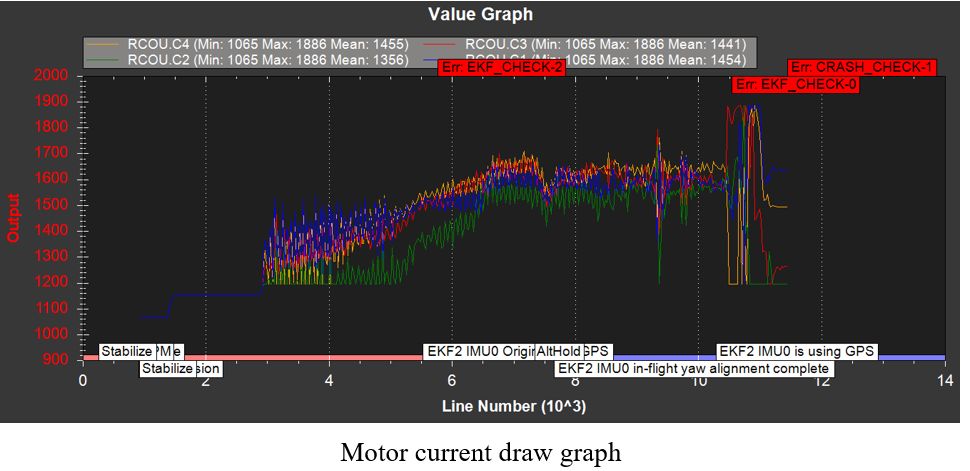
7。 RCOUT
一个。 C1/C2/C3/C4:电机1至4的电机电流
8。 VIBE
一个。 Vibe X/Y/Z:不同轴的振动
步骤104:15.3

只需勾选方框在右下方面板上您想要analsye的参数以及该参数的相应图形将被生成。建议在分析新参数之前取消选中不相关的参数,以便可以适当地重置图表的比例。要增加图形的大小,请将光标移动到双点划线,然后向下拖动以展开图形。这又占据了它下方的空间。
如果要保存图形,请右键单击并将图像另存为’。更简单的是,使用剪切工具裁剪要保存或复制的位置。下载Snipping Tool的链接如下:
https://snipping-tool-plus-plus.en.softonic.com/do 。。.
它需要Java工具才能运行:下载Java的链接如下:https://www.java.com/en/
步骤105:15.4
航班数据有助于找出崩溃,故障或无法执行特定功能的原因。例如,如果四轴飞行器在高度保持模式下持续下降,请查看气压计数据,以查看气压计对高度的感知是否正常工作。
步骤106:15.5
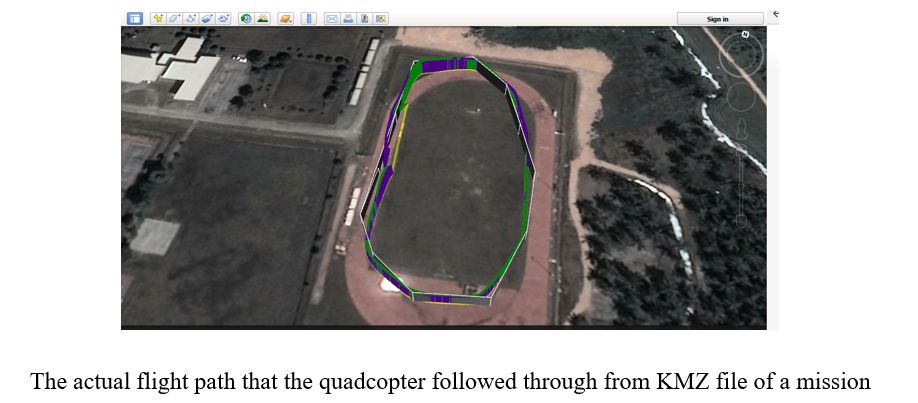
与下载的二进制日志文件一起是航班的KMZ文件。可以使用Goggle Earth pro软件打开KMZ文件。在PC中导航到C:\ Users \ Username \ Mission Planner \ logs \ QUADROTOR \ 1,然后使用Google地球专业版打开KMZ文件。
从Google地球专业版,您将能够分析您的在3D街景中飞行,
步骤107:15.6
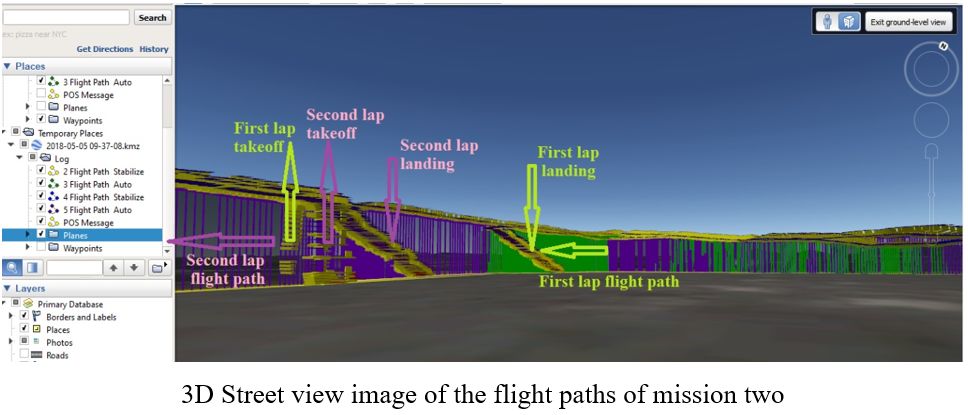
可以使用Google earth pro观察3D街景图像。根据飞行模式的切换区分不同的飞行路径,如上面左侧面板所示。可以从列表中取消选择飞行路径,如左侧面板中所示。未经检查的飞行模式将从3D地图中消失,仅留下已检查的飞行路径。从上图可以看出,绿色路径是四轴飞行器所遵循的自动模式飞行路径的第一圈,而重叠的紫色路径是自动模式的第二圈。
飞行路径的水平距离测量可以是使用软件中的标尺工具完成。
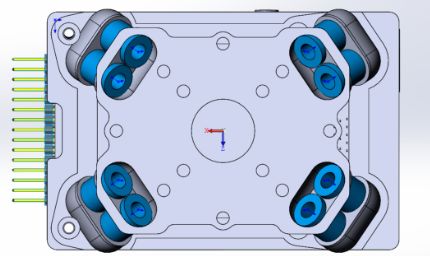
步骤108:16.0对象避免实现
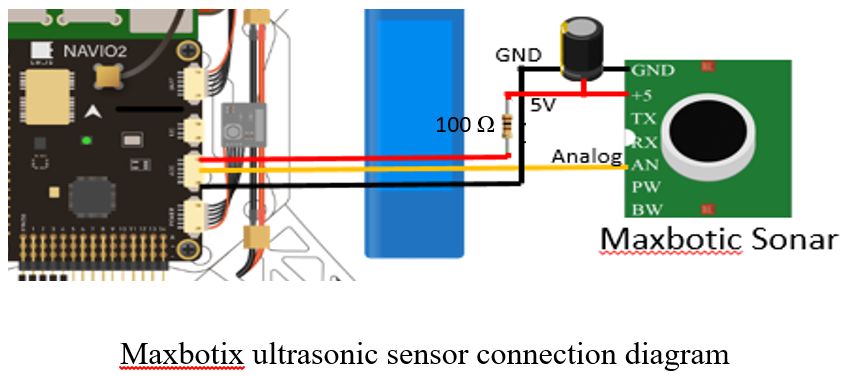
APM支持对象避免最多2个方向。通过Maxbotix的LV-MaxSonar-EZ0高性能声纳,四轴飞行器能够避开6.45米范围内的障碍物。这种昂贵的EZ0传感器仅用于四轴飞行器上方的物体检测,以避免在四轴飞行器起飞或上升时撞击物体。 MaxSonar与Navio2 FC的连接是通过模数转换器(ADC)引脚连接,如下图所示连接FC的电压,接地和模拟引脚到声纳。要建立物理连接,必须在线购买Navio2采用的6引脚ADC的微插头引脚。标头引脚也适合其他端口,只要引脚数匹配。
步骤109:16.1



正如所研究的那样,在电源消耗高的时候,将100uF电容与电源并联,以稳定电源。一个100Ω串联电阻以在空闲期间调节高逻辑状态。这种配置一起带来了MaxSonar传感器读数的一致值。
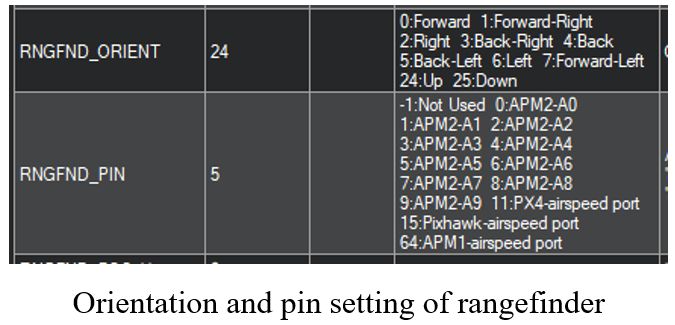
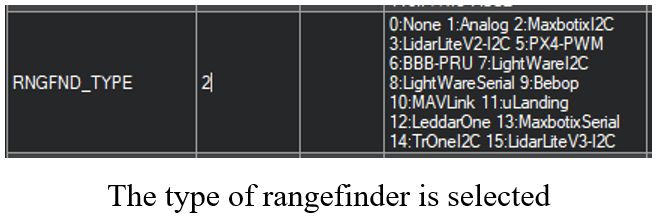
在Mission Planner软件的“完整参数列表”中进行了设置。“选项卡以启用测距仪并指定它将对其起作用的方向。对于UP方向,测距仪方向设置为24,并且测距仪引脚设置为5,连接到Navio2上的引脚ADC 3,如下所示。显示所需参数列表中的其他所需设置。使用“ find”搜索它们。功能
步骤110:16.2
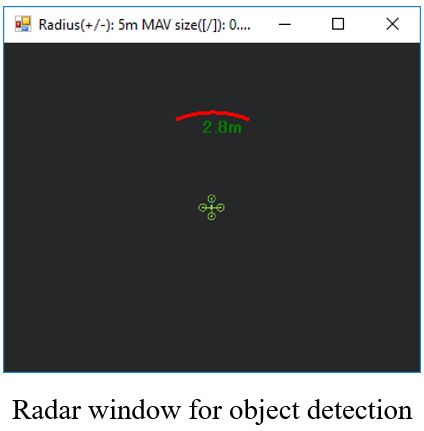
实时传感器数据未显示除测距以外的所有方向或测距仪中的25初始设置中的选项卡,但显示在由Ctrl-F快捷键启动的临时菜单中的接近按钮启动的半径雷达中。请注意,当方向设置为向上或向下时,二维雷达不会显示距离。
步骤111:16.3
确认后声纳正在通过雷达窗口进行监控并测试不同距离的数据,然后四轴飞行器可以安全地避开障碍物。传感器根据设定的方向正确安装,确保四轴飞行器上的物体(如接线或GPS支架)没有进入ping的行进路径。四轴飞行器处于待命状态,然后仅切换到引导或高度保持模式以避免物体。
现有的物体避让系统强调了一些限制,目前Emlid开发人员仍在开发中。限制包括昂贵的超声波传感器,物体避免可以工作的模式的限制,以及物体避免系统可以工作的方向的限制。
来自https://shaofuhw.github.io/Portfolio/的Shao Fu已经提出了一个使用HC-SR04超声波传感器的解决方案,用于在他的YouTube频道中实现避免对象https://www .youtube.com/watch?v = kmpxkKq3zNA
步骤112:16.4
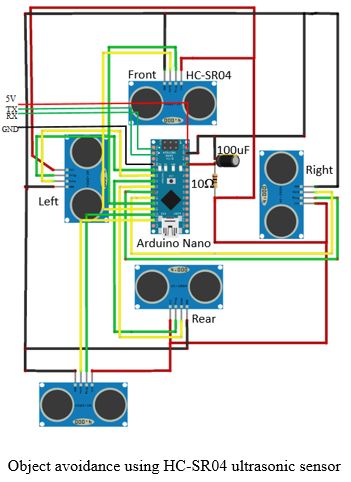
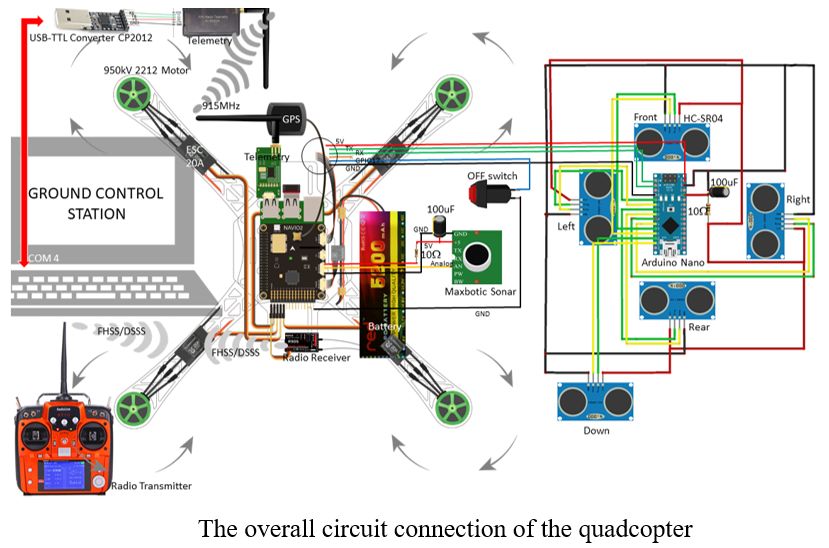
如上所示,五个便宜超声波传感器HC-SR04用于前,右,后,左,下方向的物体检测。 Arduino微控制器充当接收传感器数据的处理器并相应地生成响应。使用Arduino Nano是因为它体积小,重量相对较轻。绘制了与所有传感器的Arduino连接,并绘制了完整的电路图。
步骤113:16.5
这次,系统通过UART串口连接到FC。 5V和接地完成供电电路为Arduino Nano供电,而FC的发送器(TX)引脚连接到Arduino Nano的接收器(RX)引脚。同样,FC的RX引脚连接到Arduino的TX引脚。 UART端口最初用于遥测空气模块,以实现与GCS中的地面模块的通信。为了让对象避免系统让路,需要一个简单的修改和一个额外的组件,这样可以节省UART端口。
诀窍是交换地面和空气模块,现在通过地面模块连接FC上的USB端口和空气模块已连接到GCS。有关详细信息,请参见遥测组件下的“无人机硬件设置”部分。
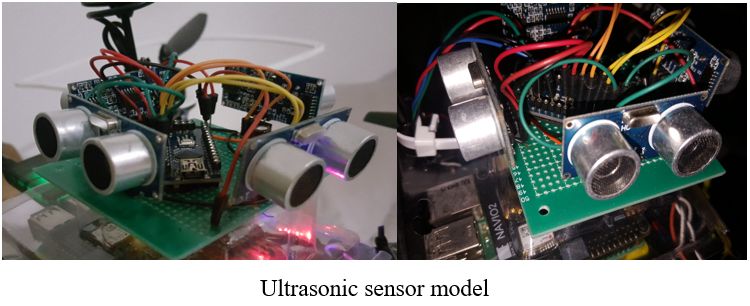
所需的连接点正在铜板上精确紧密地焊接。使用跳线来缓和连接,并将母头针焊接到位以在每个方向上安装超声波传感器,如下所示。同样,添加了电容器和电阻器以提高每个传感器的一致性。
步骤114:16.6
软件物体避免系统的构建是使用Arduino软件(IDE)构建的。对于距离测量,NewPing库用于直接以厘米为单位检索原始传感器数据。为了提高传感器的整体数据一致性,采用了5个传感器读数的平均值。据了解,声纳输出零距离并不少见。当物体的距离超出检测范围或存在方向不确定性时,就会发生这种情况。为了避免平均值受到这些误差的影响,只取得至少4个非零读数的平均值,否则丢弃。
通过发送包含信号的mavlink pakages来实现俯仰和滚转响应现有的滚动和俯仰值。从数据闪光日志中,当四轴飞行器稳定时,输入RC通道显示接近1500的俯仰和滚转值。当四轴飞行器向下倾斜时,该值下降到1500以下,而当倾斜时,该值在音高通道中上升到1500以上。同样,当四轴飞行器向右倾斜时,它会在滚动通道中上升到1500以上,反之亦然。
步骤115:16.7
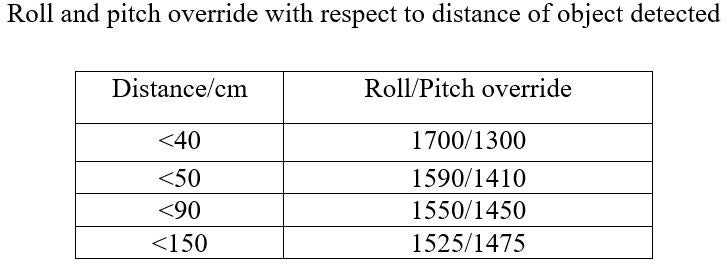
这条信息至关重要,因为从Arduino微控制器发送到FC的Mavlink消息将是覆盖相应无线电信道中的那些值的消息。 Arduino软件的编码方式是,当检测到的最近距离减小时,滚动间距值的变化会增加。
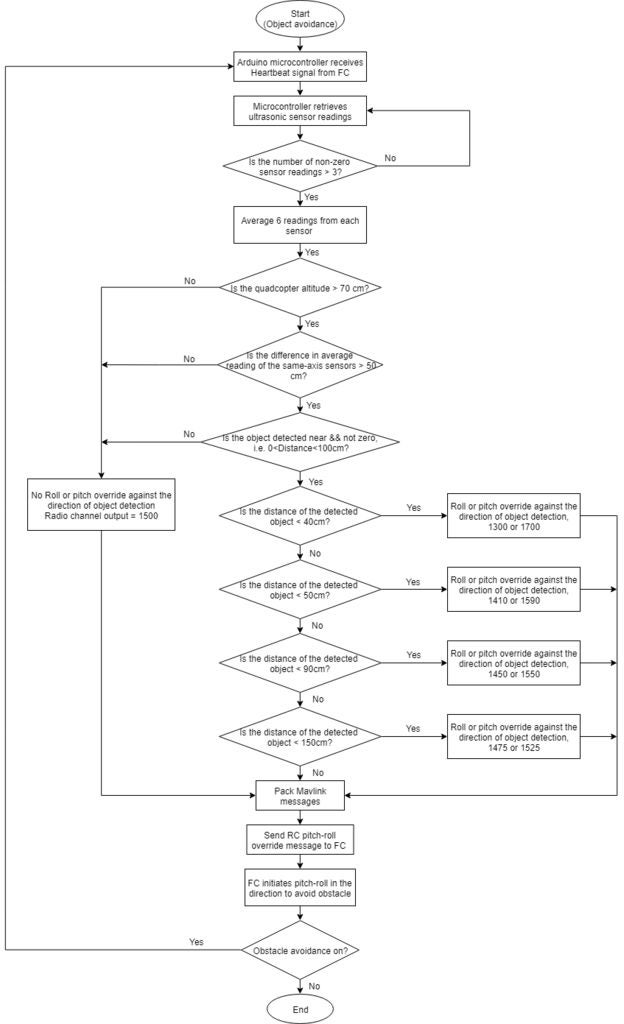
步骤116:16.8
只要满足上表中列出的标准,就不会立即启动回复。必须同时满足其他几个条件,以确保只在必要时和环境允许时才进行响应。
首先,四轴飞行器只能在任何飞行模式下开始避开物体当“向下”超声波传感器显示高度超过一定高度时。这样可以在起飞过程中稳定飞行,不必要的倾斜会导致四轴飞行器的部分撞击地面。只有在确保四轴飞行器与地面之间有足够的间隙才能执行定义的俯仰或滚转之后,物体避免才能控制飞行。
其次,特定传感器的物体探测距离必须达到远离距离小于指定值,即100厘米。在其背景下的“近”被定义为非零值 - 如果障碍距离太远 - 低于100厘米。
第三,沿同一轴的距离传感器必须同意响应一种方法,即四轴飞行器将作用的响应方向必须没有障碍物。换句话说,如果前传感器上的物体距离与后传感器的物体距离之差不超过安全指定值,即使存在看似满足的障碍物,四轴飞行器也不会向后倾斜前两个条件。
在Arduino Nano上传草图期间,必须将TX和RX引脚从Arduino断开连接到FC。 Arduino上的LED闪烁表示两个组件之间的某些信息交换。例如,Arduino被编码为每秒接收来自FC的RX引脚心跳信号。反之,只要满足指定的一组响应,Arduino的TX引脚就会向FC发送超越信号。
当满足所有条件时,在标准UART发送功能中发送包含新RollOut和PitchOut值的RC覆盖mavlink消息。由于程序在循环中运行,一旦障碍物与特定传感器保持距离,响应应该停止并返回零俯仰或滚动的初始值,即1500.
避免物体的测试是通过将四轴飞行器的四个侧面约束到如上所示构建的PVC矩形结构来实现。
- 相关推荐
- 无人机
-
关于四轴飞行器的发展2012-07-27 0
-
半智能四轴飞行器设计2013-10-28 0
-
四轴飞行器2014-05-21 0
-
【专题分享】最新出炉的四轴飞行器专题2015-05-08 0
-
四轴飞行器的小程序2015-08-08 0
-
四轴飞行器的结构原理2016-01-15 0
-
【CANNON申请】四轴飞行器2016-01-26 0
-
开源四轴飞行器2016-03-03 0
-
求微型四轴飞行器的教程2016-04-19 0
-
四轴飞行器开发解密2018-01-02 0
-
四轴飞行器教程资料分享2019-01-15 0
-
如何学习制作四轴飞行器2019-04-03 0
-
怎么设计一个简易的四轴飞行器系统2021-03-04 0
-
一个小时组装的 STM32F103C8T6 主控 DIY 组装的 STM32开源四轴飞行器 MPU60502021-12-06 845
全部0条评论

快来发表一下你的评论吧 !
