

自制四轴飞行器DIY图解
电子说
描述
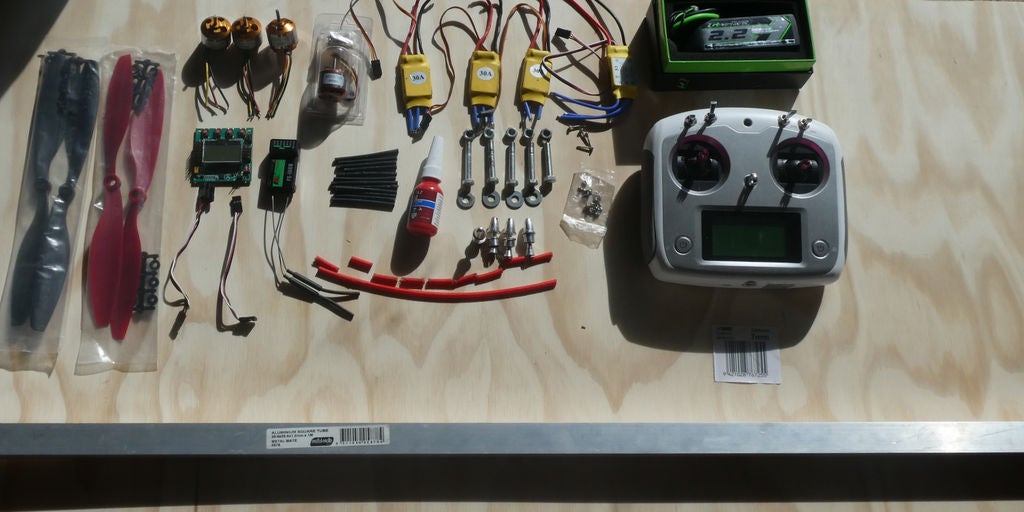
第1步:收集您的用品
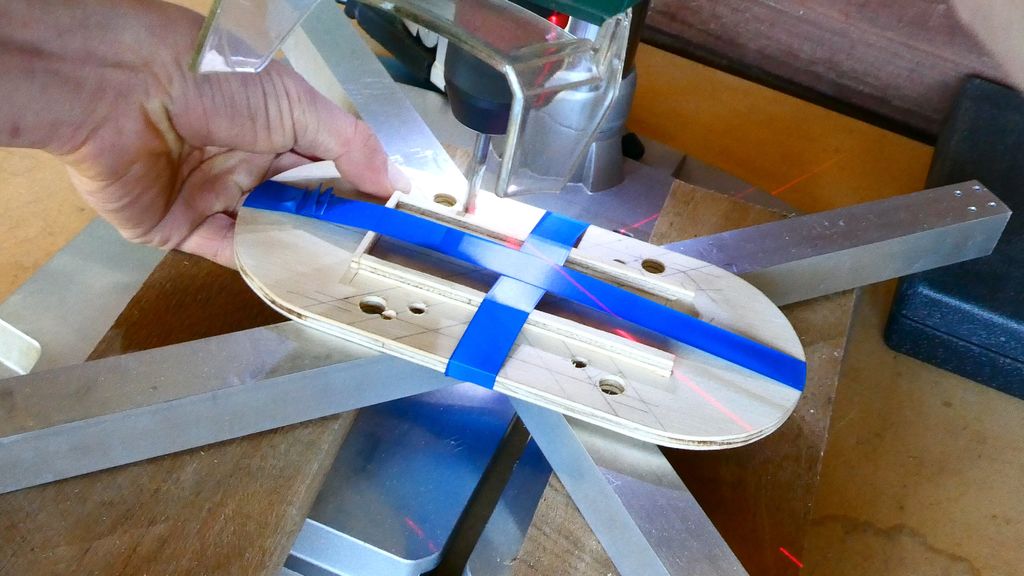
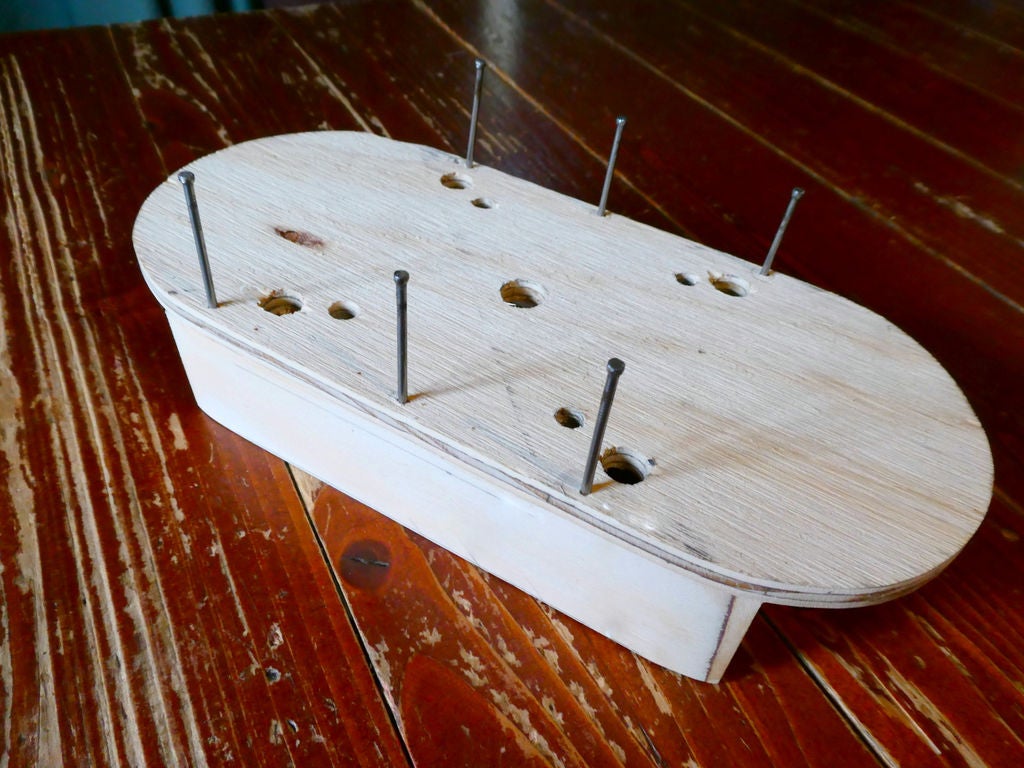
第2步:制作Pod





打印本节中的PDF并将其粘贴到胶合板上,切出并钻出平面上的所有孔,然后切割一些薄的在基座上使用的胶合板条带将电池固定到位。注意:您可以根据电池尺寸将电池盒的侧面切割得更窄或更宽。
通过平衡底板上的电池并在末端画一条线来找到平衡中心。将胶合板的小条胶粘到平台上,使电池很硬,然后推入。
然后你已经完成了第二步!
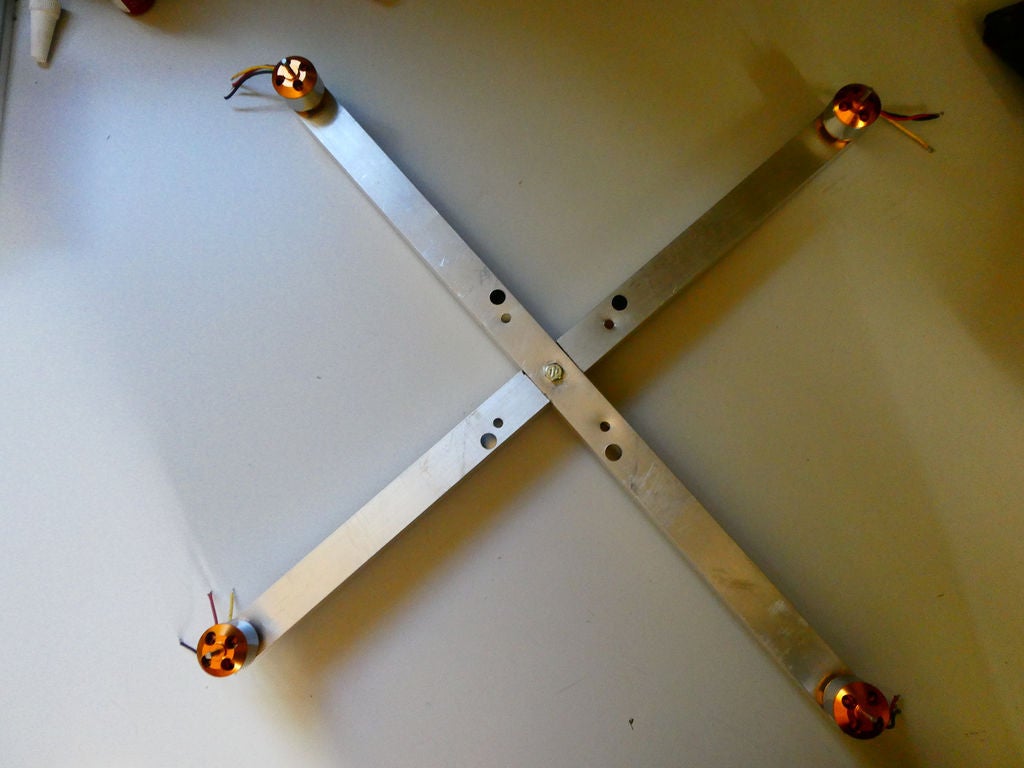
第3步:制作铝框架

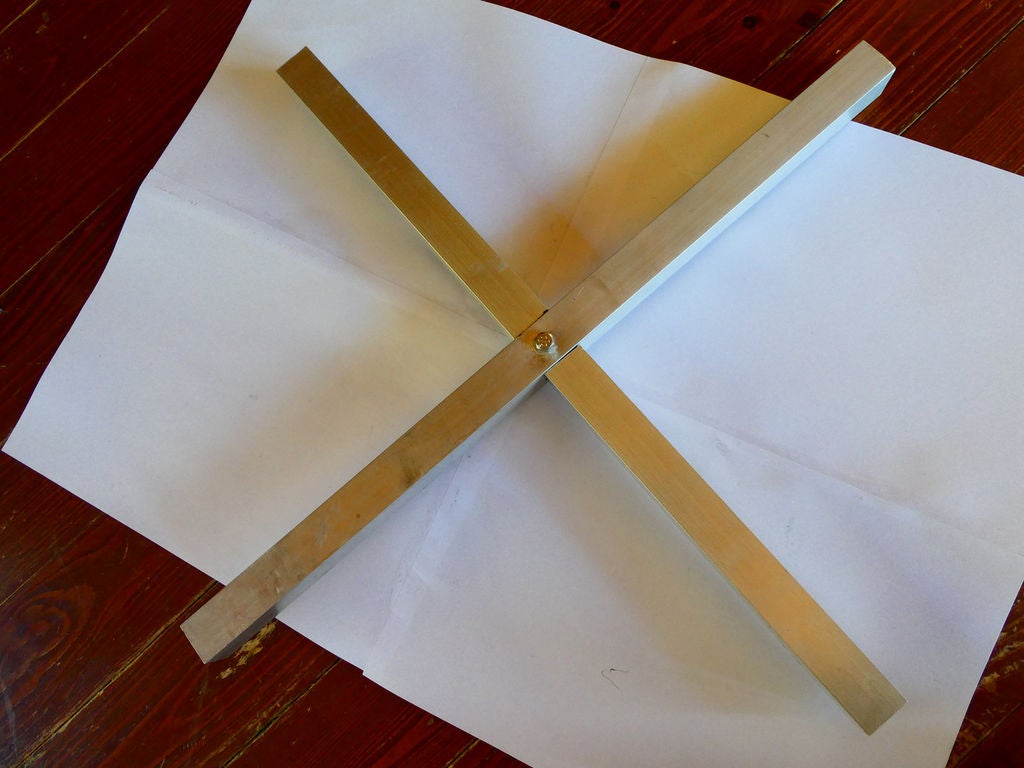



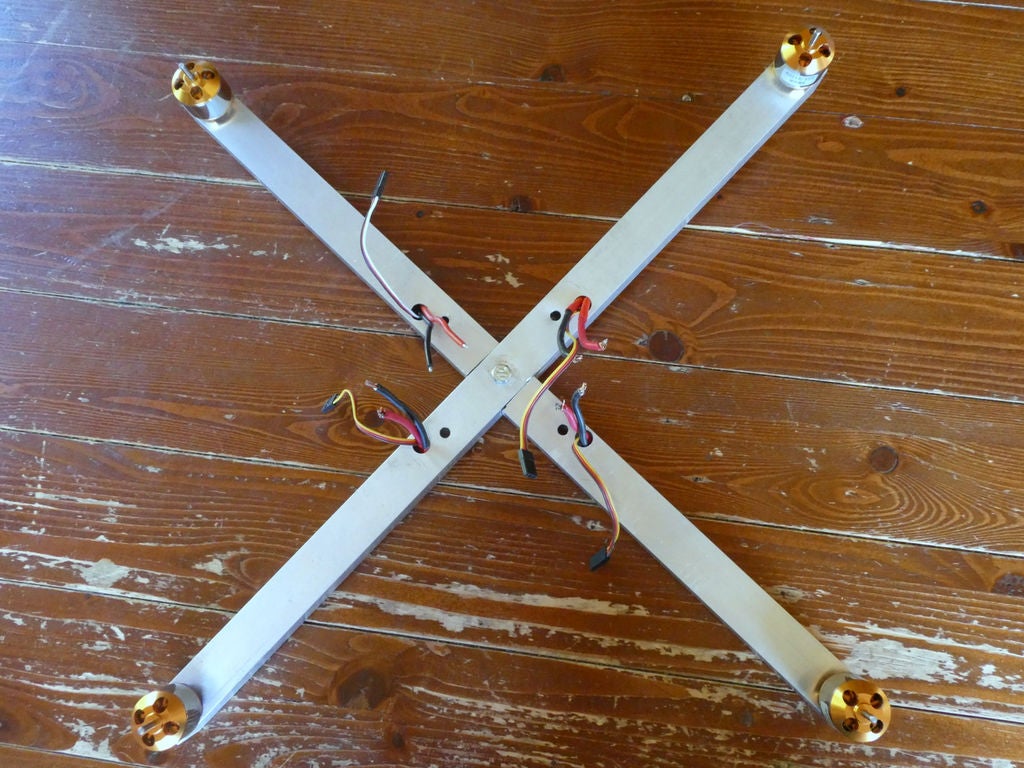
将铝管切成两个50厘米的长度,将管子的宽度(2.5厘米)沿着每个管子的一半切割到一半深度,然后钻孔和螺栓这两个部分组合在一起,形成一个完美的X.
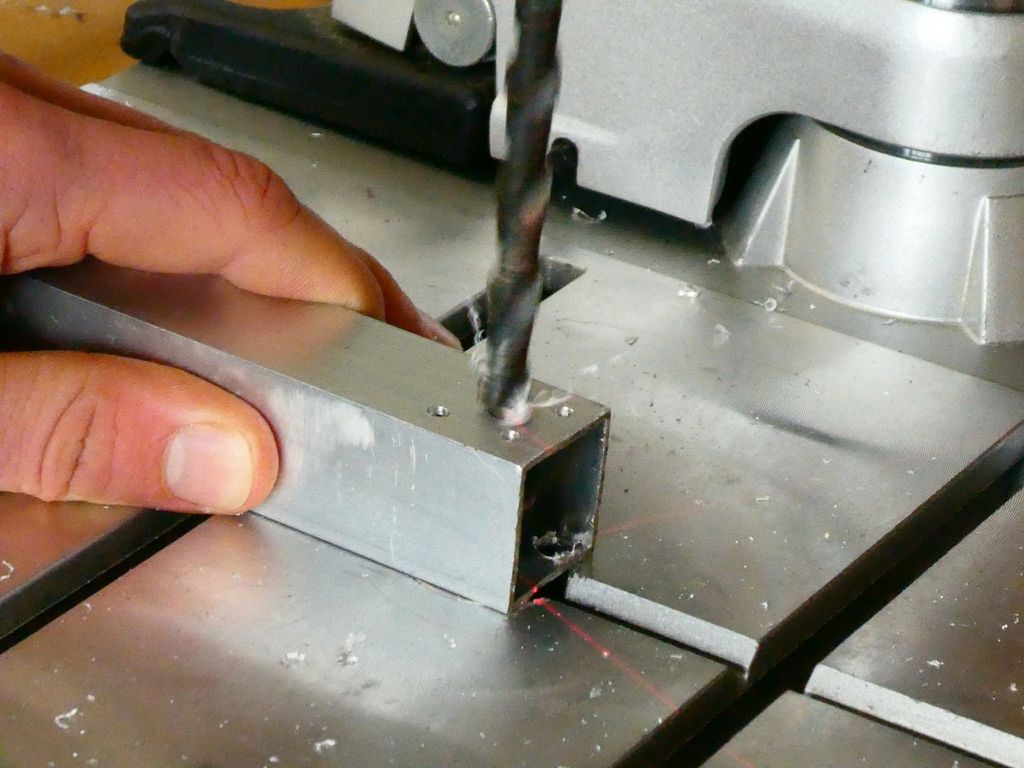
现在使用电机附带的电机安装座来画出需要在X的末端钻孔的位置。钻孔。然后将吊舱带到框架上并钻出底座上的八个孔,同时确保锉掉钻孔周围的锋利位置,否则它们会在以后撕裂您的ESC。
将侧面粘到底座上并放入一些面板插针以加强它以防万一它崩溃。 :)
现在你已经完成了第三步!
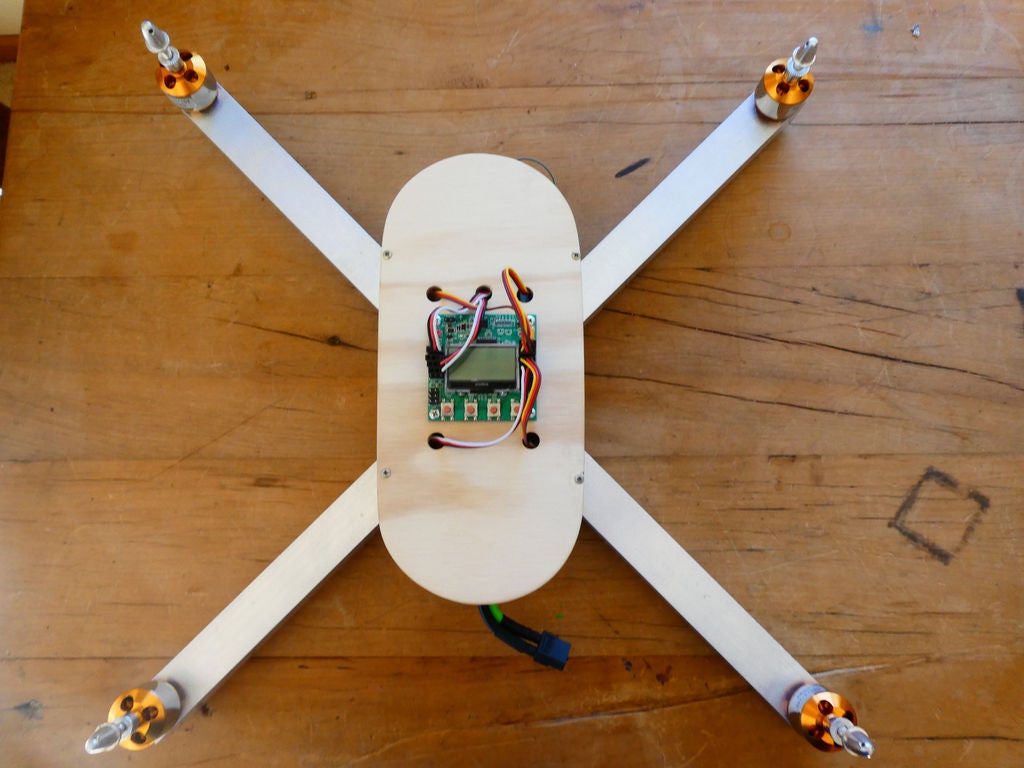
第四步:安装电机和电位器
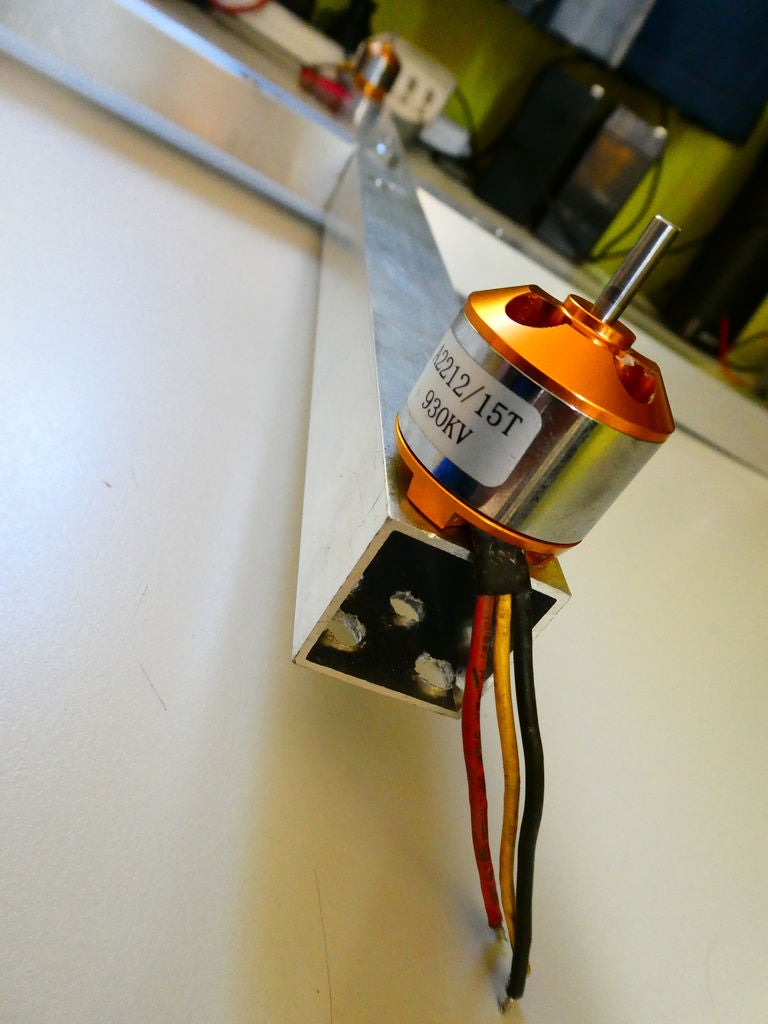
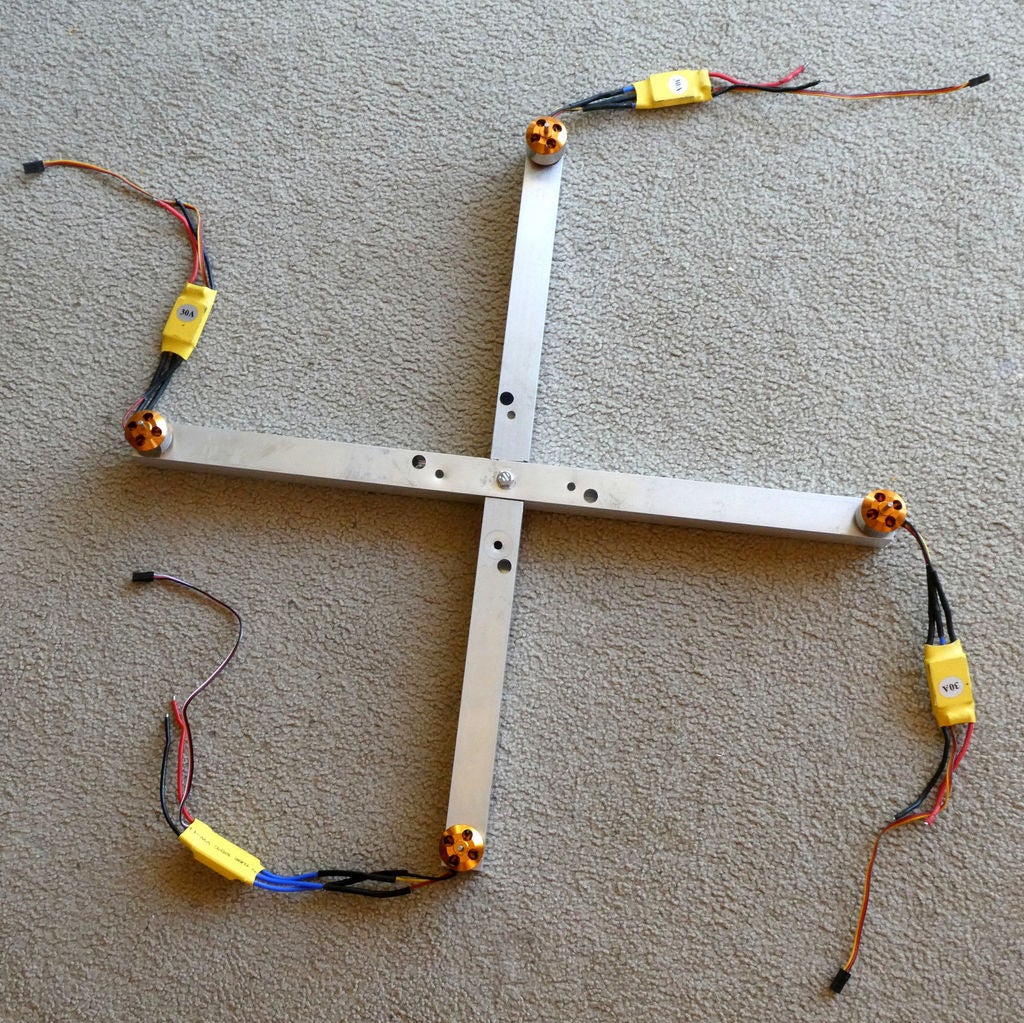
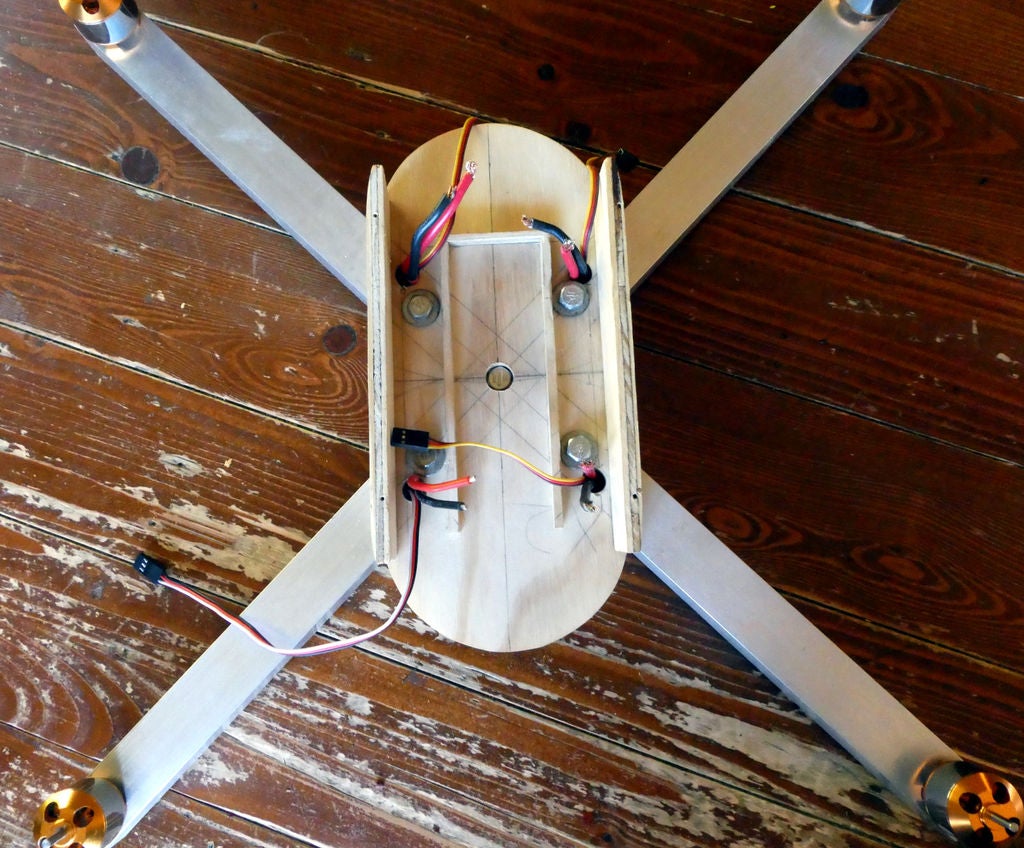
现在是时候将电机拧到框架上了,这就是你的螺纹锁定器派上用场的地方,如果你不使用它,你很可能在飞行时松开你的一个电机,这可能不是你想要的是什么!
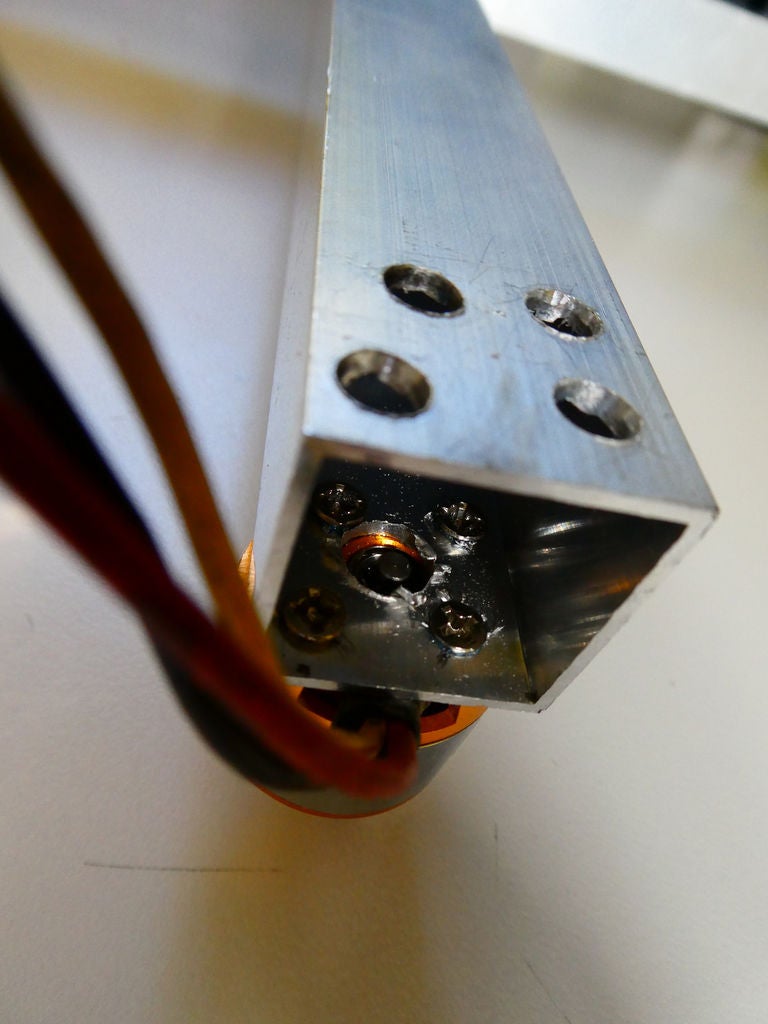
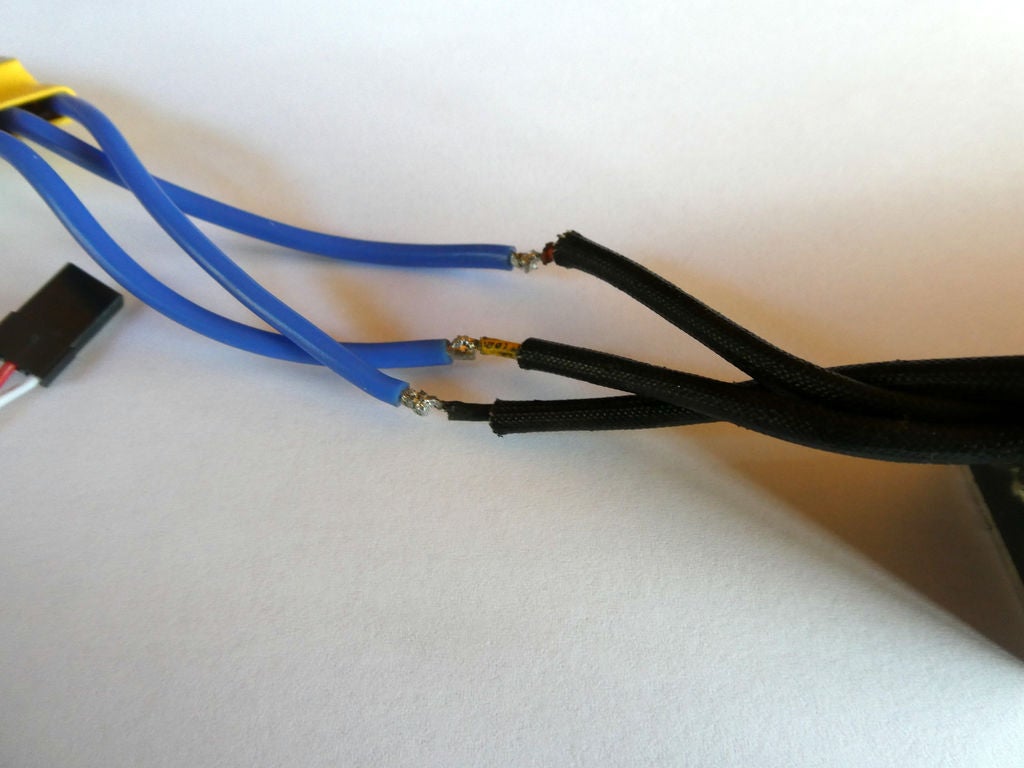
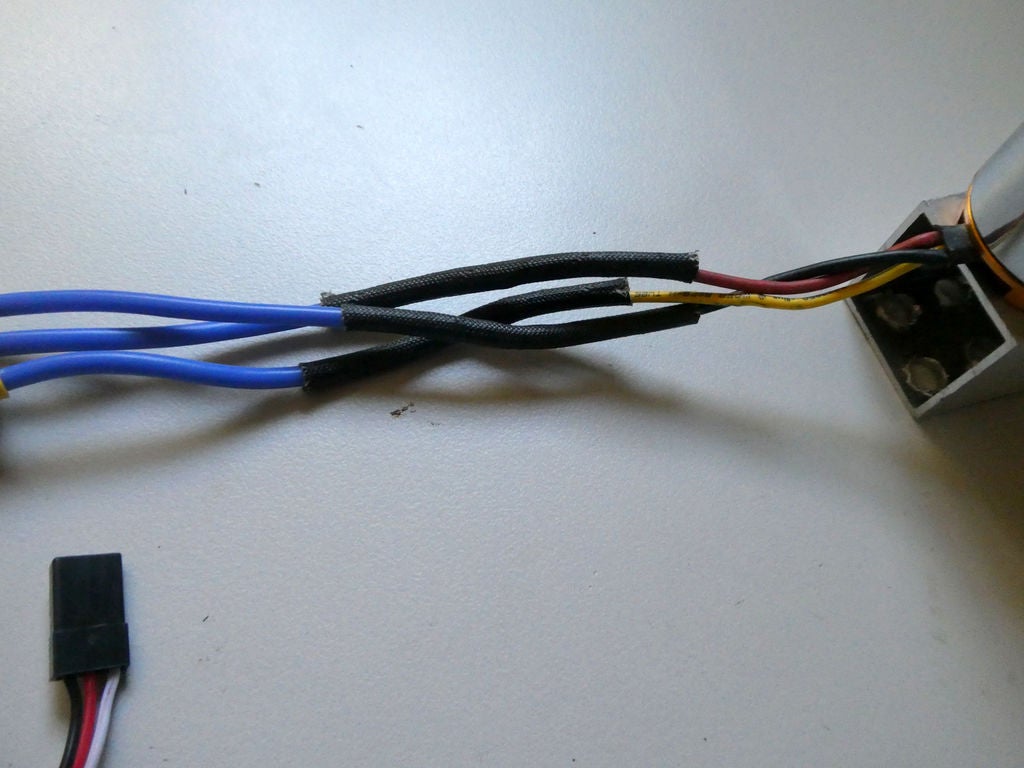
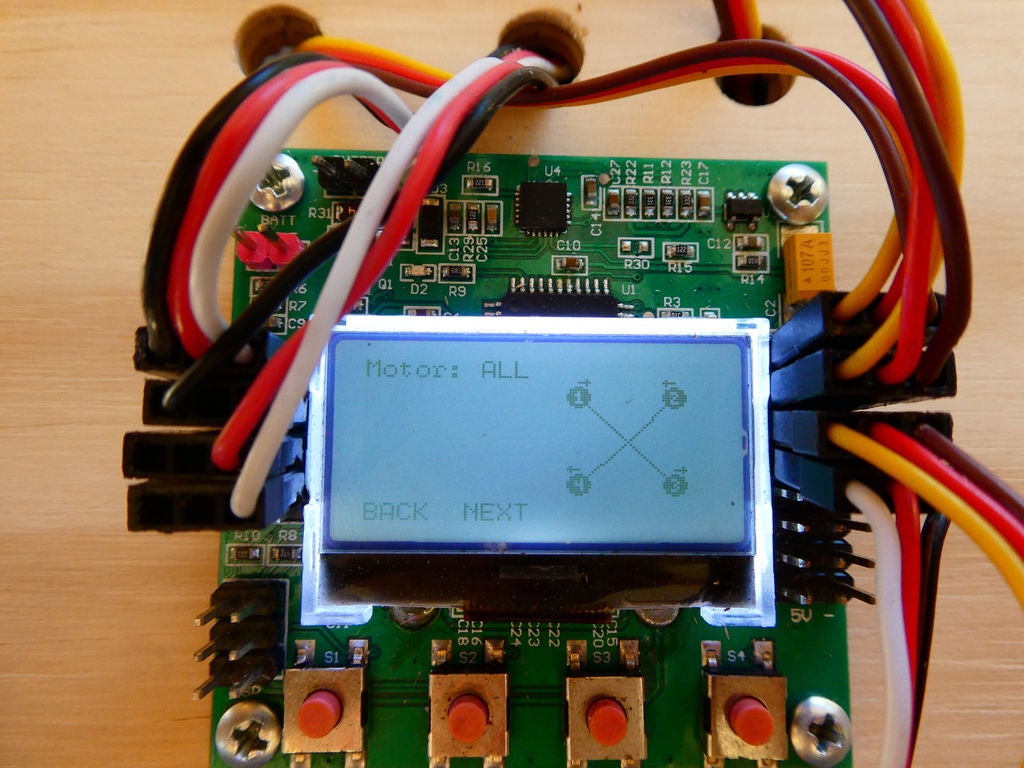
将你的ESC(电子速度控制器)连接/焊接到电机上,使左上电机顺时针旋转,右上电机逆时针旋转,右下电机顺时针旋转,左下方电机逆时针旋转。要更改电机的方向,请更换ESC上的三根电线中的任意两根,电机将反向旋转。完成后,隔离你的连接/连接。
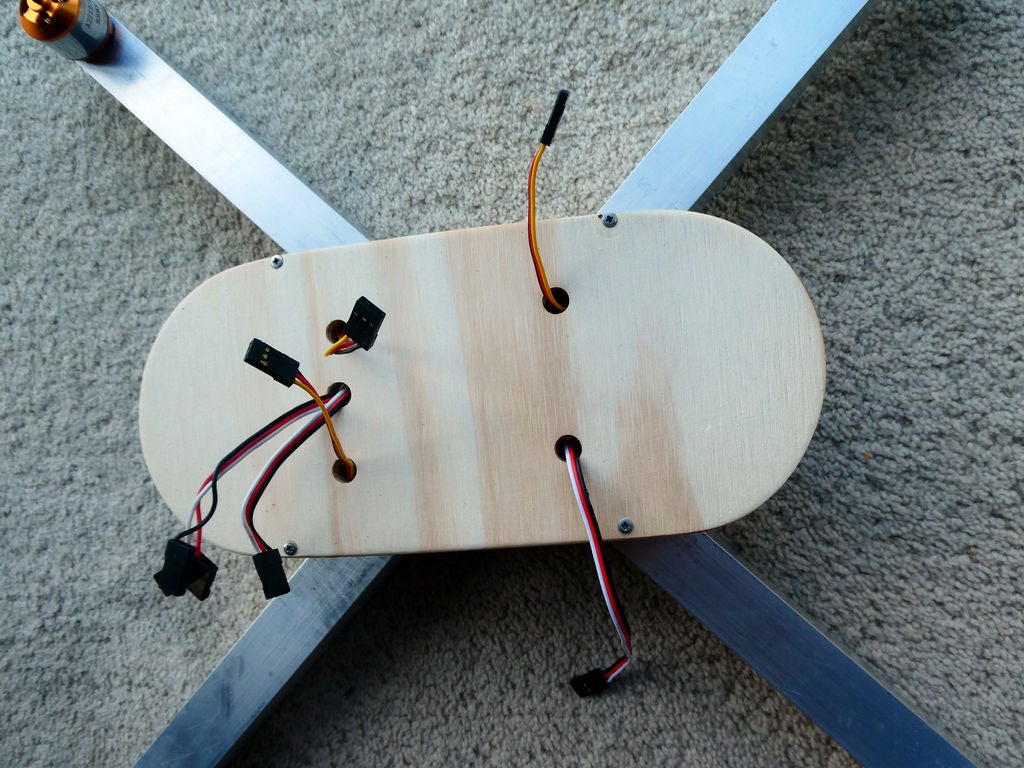
将ESC从铝管中拉出,然后用镊子将电线拉过孔。将你的吊舱排成一行,然后将吊索拉过框架。
然后你已经完成了第四步!
第五步:焊接导线并安装Kk2.1.5飞行控制器
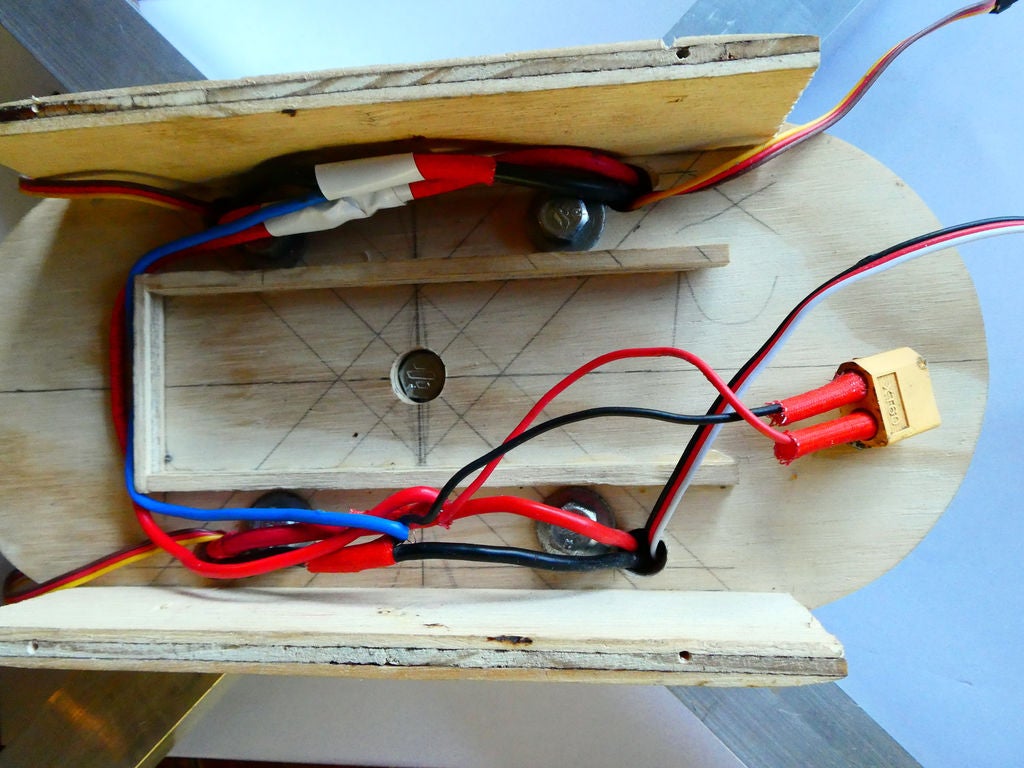
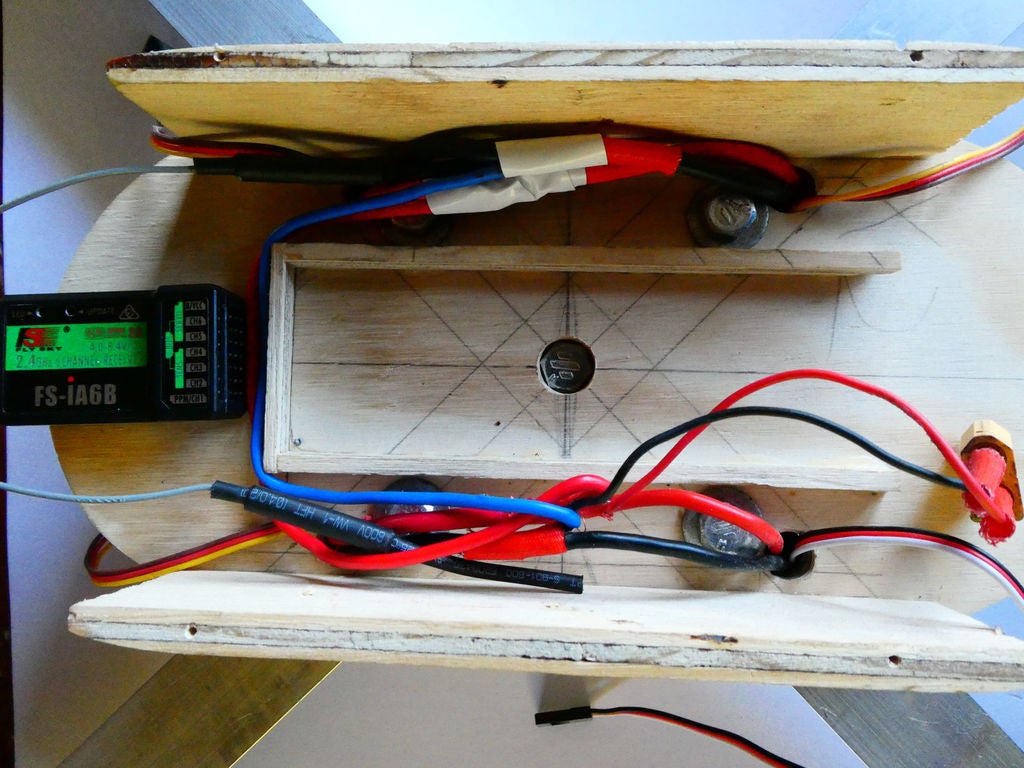
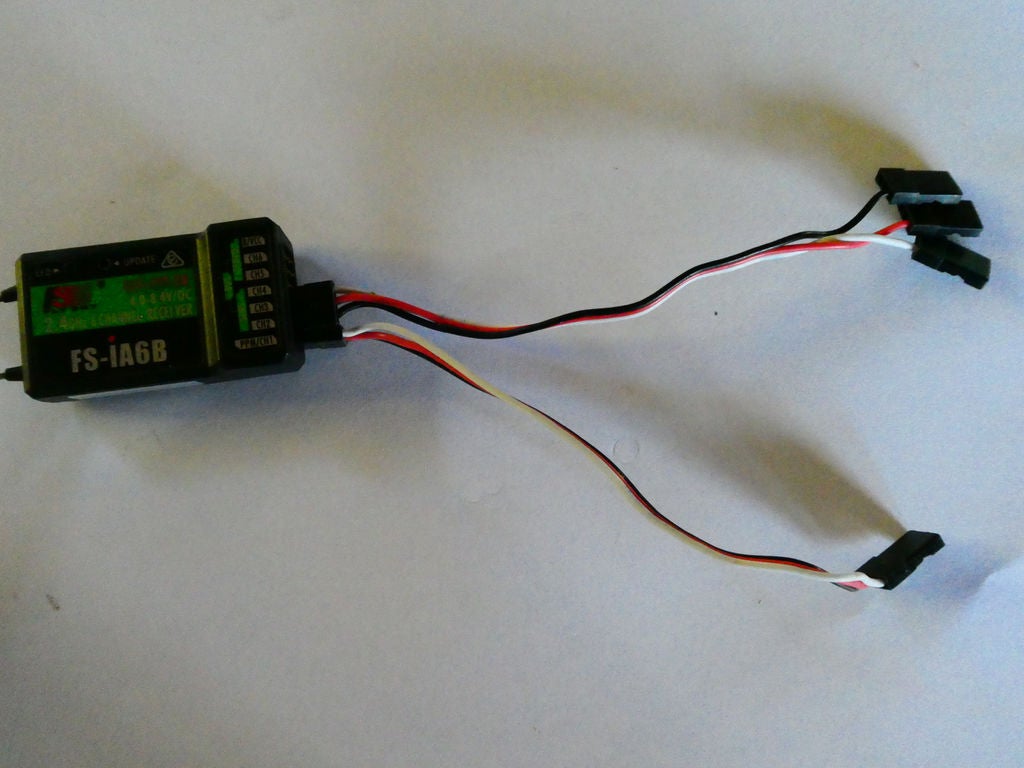
将所有黑色( - )导线和所有红色(+)导线焊接在一起,同时将两根导线焊接到XT60夹子(红色和黑色)。用一些“蓝色tac”将接收器连接到吊舱的前端(或者你可以使用一个活泼的扎带。)
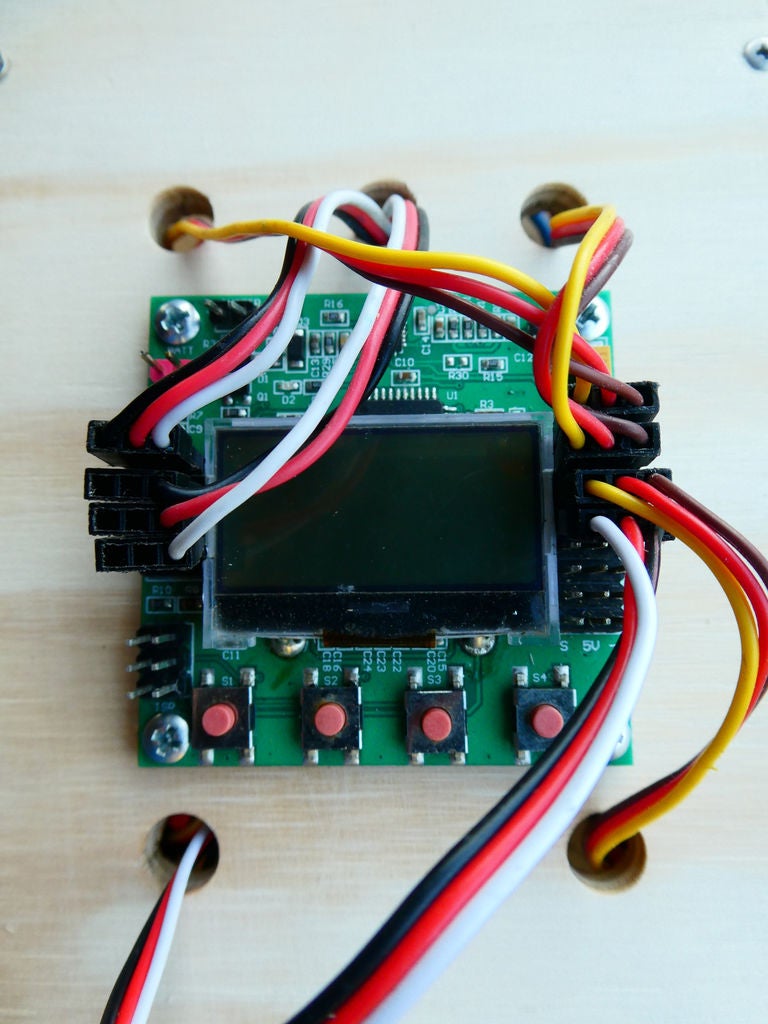
通过吊舱盖上的孔将来自ESC和接收器的引线穿过然后拧上盖子。接下来将kk2.1.5飞行控制器拧到盖子上。将ESC的引线连接到kk2.1.5飞行控制板的右侧,将接收器的引线连接到左侧。
您现在已经完成了第五步!
步骤6:设置KK2.1.5飞行控制器
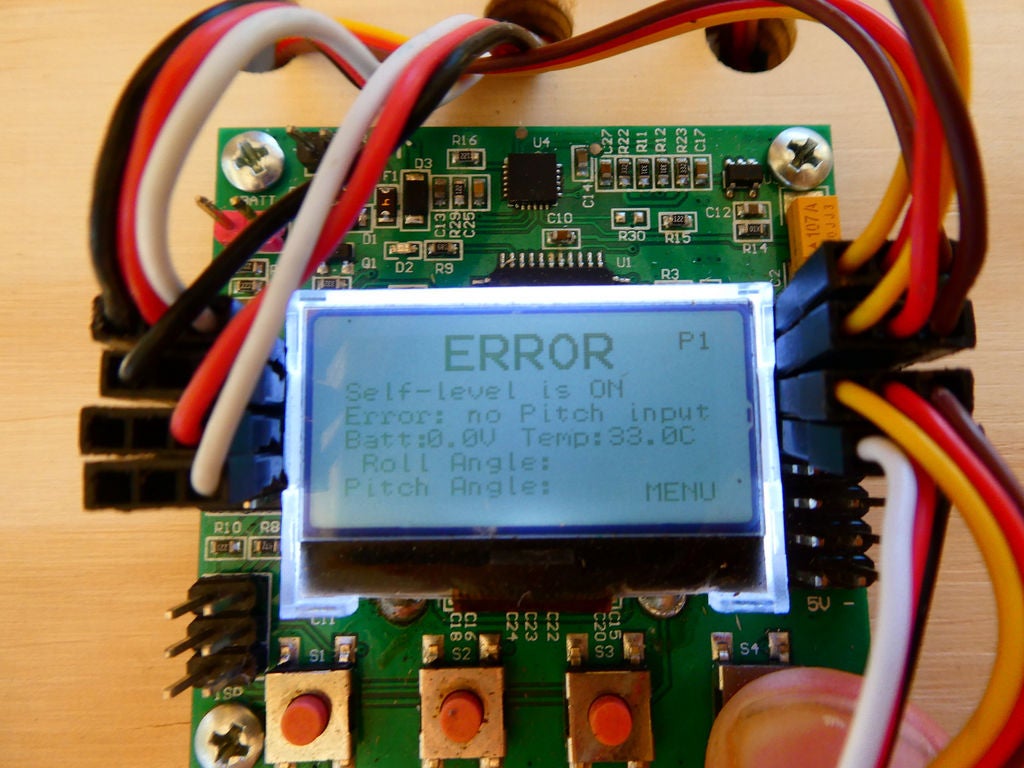
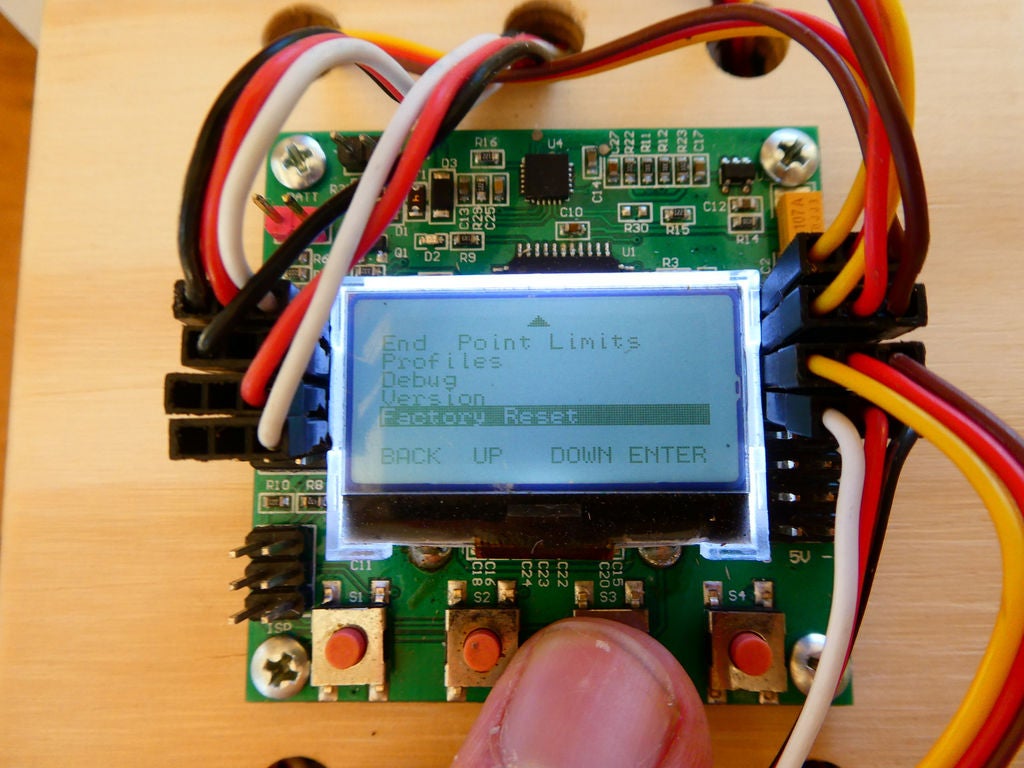
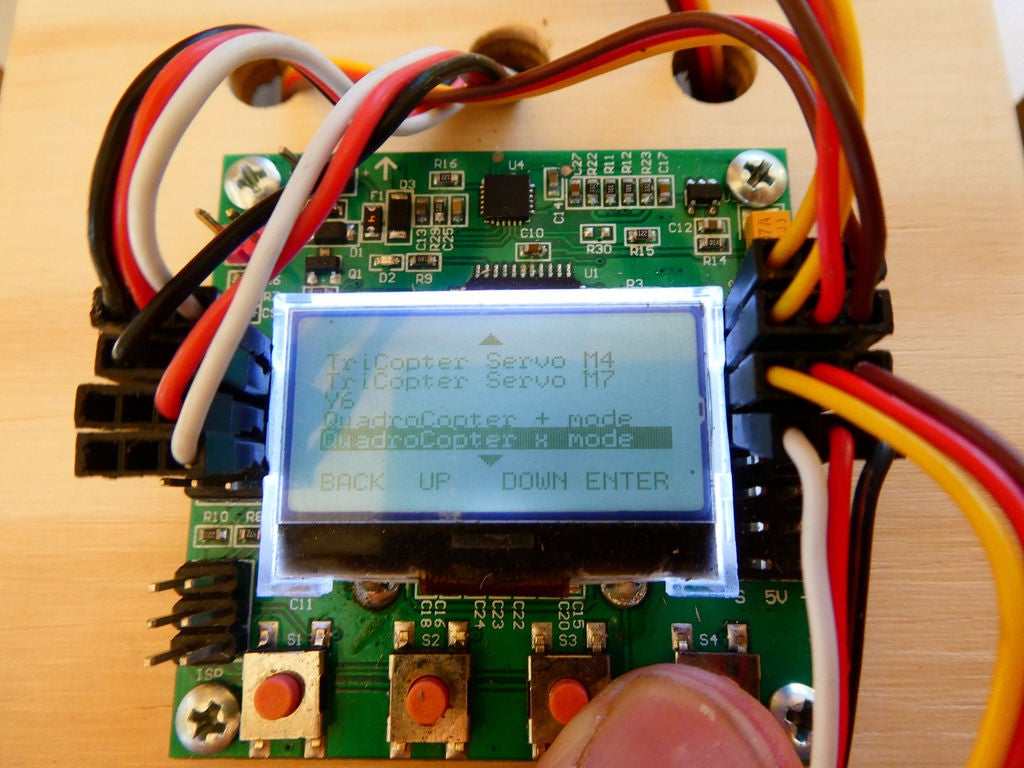
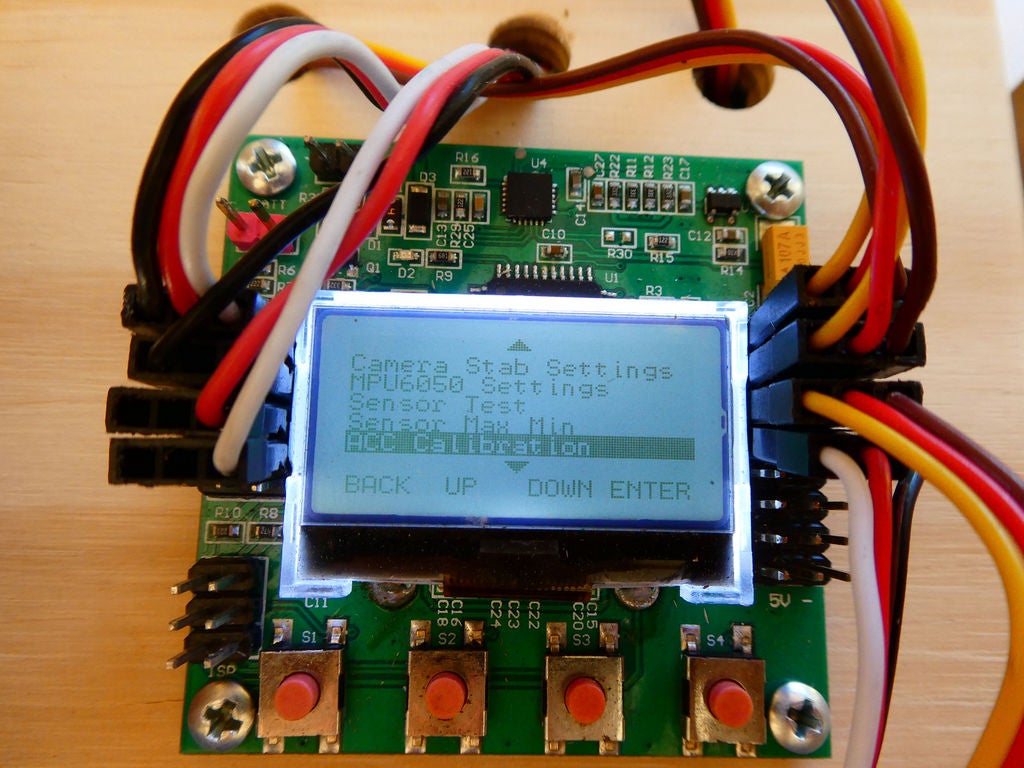
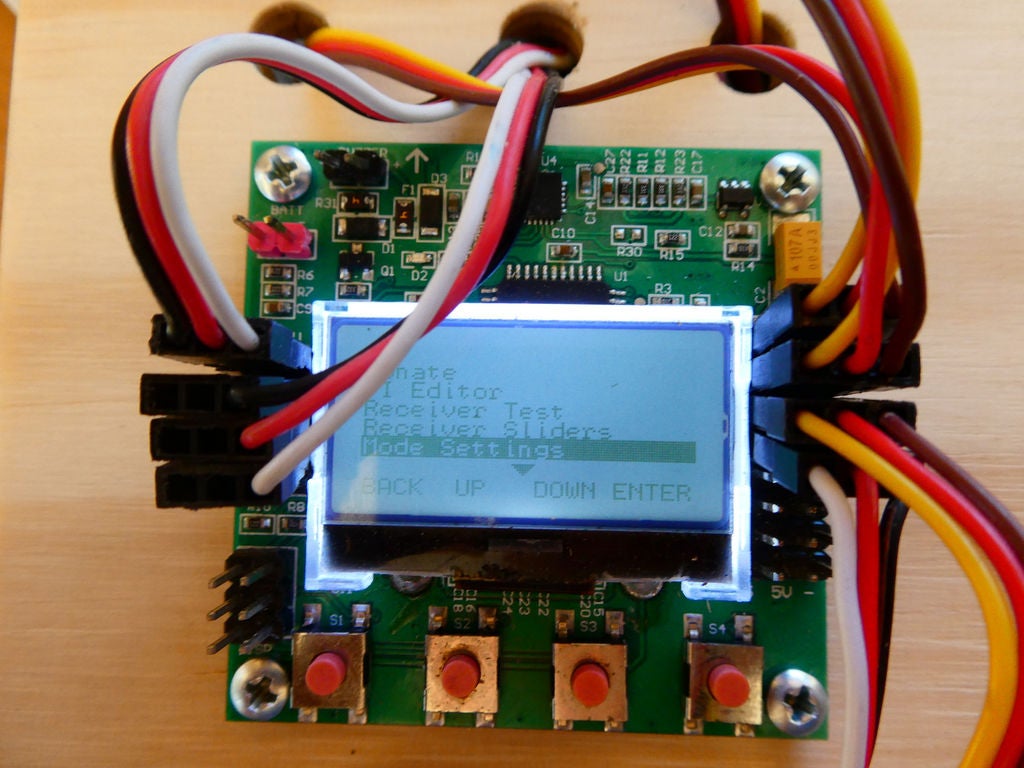
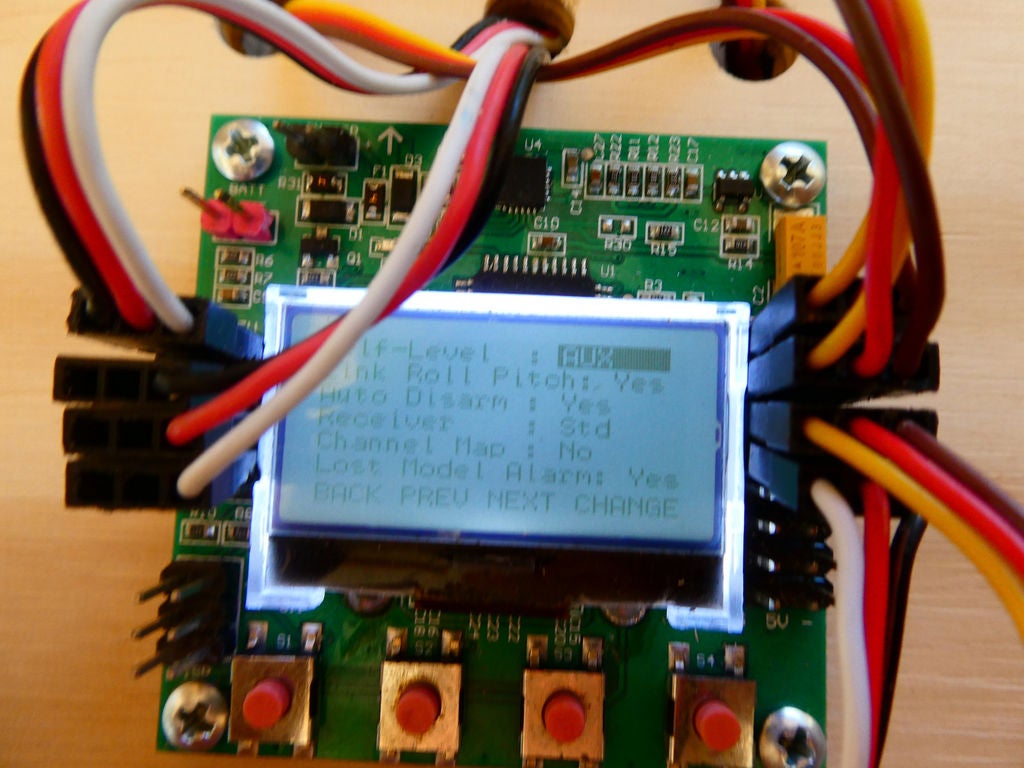
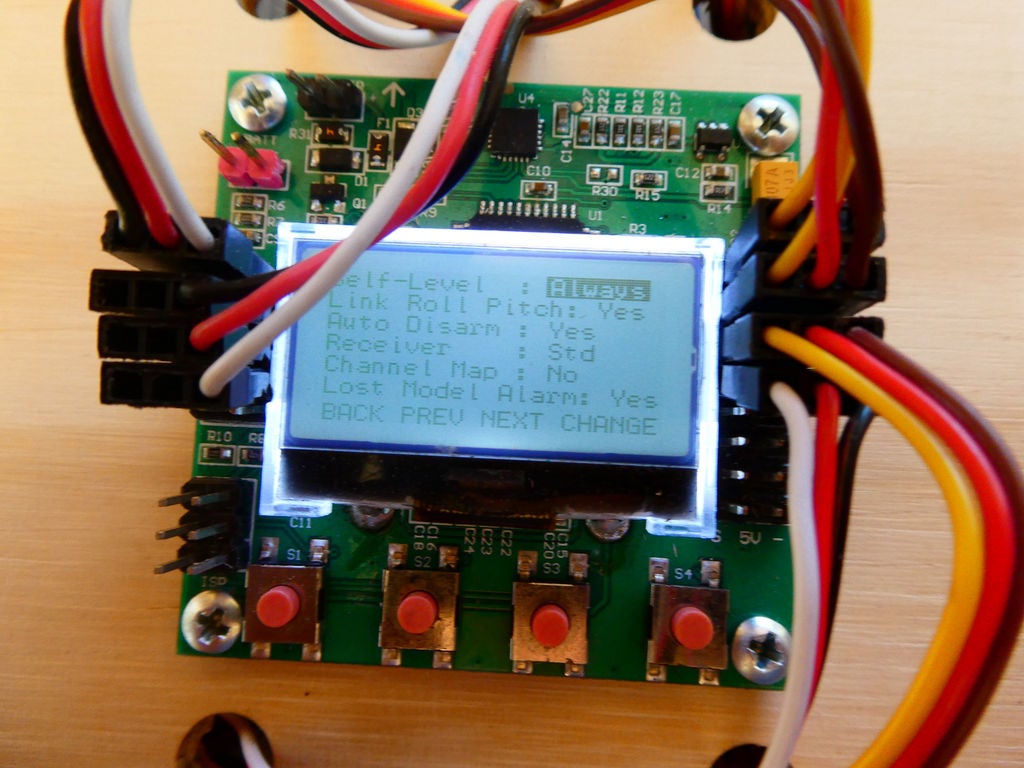

插上电池和kk2飞行控制器应该启动,它应该显示一条错误信息,忽略它并按菜单按钮,向下滚动到底部并单击‘恢复出厂设置’。然后它应弹出一个菜单,用于选择你想要的无人机框架,向下滚动直到你进入四轴飞行器X模式,点击“接受”,再点击背面再返回,返回菜单并向下滚动到‘ acc校准’。将无人机放在平坦的表面上,然后单击“校准”。完成后,向上滚动至模式设置并将自动电平从“AUX”更改为“始终”。
拔下电池,打开控制器电源,然后重新插入电池。 kk2飞行控制器应该打开并且现在显示SAFE,将控制器的左手操纵杆向下移动到左上角,显示器应该从SAFE变为ARMED,
你现在已经完成第六步
第七步:添加道具


拿四个道具铺设它们将塑料垫圈与道具一起放在中心位置,以便适合电机。将支柱放在电机杆上并拧紧子弹形顶部。
祝贺你!您现在已经完成了设置四轴飞行器的最后一步!快去!
第8步:提示与技巧
您可能会发现四轴飞行器非常敏感。开始飞行的最佳方式是在离地面约1米的地方飞来飞去,左右飞行,然后开始将四轴飞行器绕成圆圈。它不喜欢“生涩”的飞行,所以学会尽可能保持你的控制动作。
提示1:前面有不同颜色的道具而不是背面
提示2:当你开始飞行时,保持无人机的背面朝向你,这样你就可以知道哪个是左右的。
提示3:如果你撞到你的话,购买碳纤维道具可能是一个很好的投资quadcopter很多(像我:) :)
提示4:为飞行控制器寻找某种封面(例如浅塑料盖)
- 相关推荐
- 四轴飞行器
-
关于四轴飞行器的发展2012-07-27 0
-
微型四轴飞行器2013-10-10 0
-
四轴飞行器2014-05-21 0
-
DIY四轴飞行器如何入门?2014-07-23 0
-
四轴飞行器DIY攻略大集合2015-04-09 0
-
【GoKit申请】+基于GoKit云平台的微型四轴飞行器设计2015-05-08 0
-
如何学习自制四轴飞行器?2015-07-10 0
-
【GoKit申请】基于GoKit的微型四轴飞行器设计2015-09-22 0
-
四轴飞行器DIY分享2016-01-05 0
-
四轴飞行器的结构原理2016-01-15 0
-
MWC开源四轴飞行器2016-11-28 0
-
四旋翼飞行器结构和原理+四轴飞行diy全套入门教程2019-01-14 0
-
【第7期】每周精选之四轴飞行器设计资料汇总2019-06-14 0
-
四轴飞行器原理图分享2020-11-21 0
全部0条评论

快来发表一下你的评论吧 !
