
资料下载


×
使用红外反射式传感器实现小车自动寻迹导航的设计资料说明
消耗积分:0 |
格式:rar |
大小:0.13 MB |
2019-09-06
分享资料个
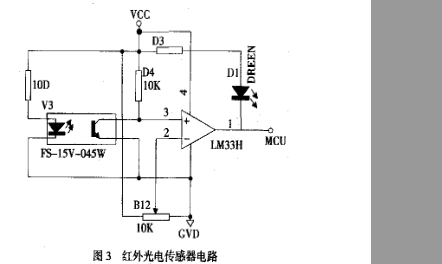
本文介绍了利用红外反射式传感器实现小车自动寻迹导航的设计与实现。自动寻迹是基于自动导引小车(AGV — auto 2guided vehicle) 机器人系统 , 用以实现小车自动识别路线 , 判断并自动规避障碍, 以及选择正确的路线。实验中采用与地面颜色有较大差别的线条作引导 , 使用反射式红外传感器感知导引线和判断障碍物。系统控制核心采用 AT89C2051 单片机 , 系统驱动采用控制方式为单向 PWM 的直流电机。该技术可以应用于无人驾驶机动车 ,无人工厂、仓库、服务机器人等领域。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章







