
资料下载


使用HCS12单片机开发板设计自主识别的智能小车论文免费下载
分享资料个
本论文制作了一个能够自主识别黑线行驶的智能车。该智能小车以飞思卡尔HCS12单片机作为核心控制器,采用光电传感器件对黑线进行感知,以脉宽调制(PWM)控制方式控制伺服机构转向,利用PID 控制算法对智能小车转速进行控制。本文对智能小车的车速控制特性,路面检测灵敏度以及寻线策略等多方面进行了调试,最终取得了很好的效果。
本论文结构安排如下:
第一章引言,介绍课题的研究背景及意义。
第二章智能车设计概述,介绍系统模型车设计制作的主要思路以及实现的技术方案概要说明。
第三章机械结构分析与设计,进行了模型车运动分析以及机械部分分析与仿真、传感器的设计安装。
第四章电路设计,介绍各模块电路设计。
第五章软件设计,介绍智能小车控制策略与软件框架。
第六章结论,说明小车的总体参数、调试过程与结果。
智能小车系统由电源模块、车速检测模块、直流电机驱动模块、路径识别模块、显示模块、单片机模块等组成。
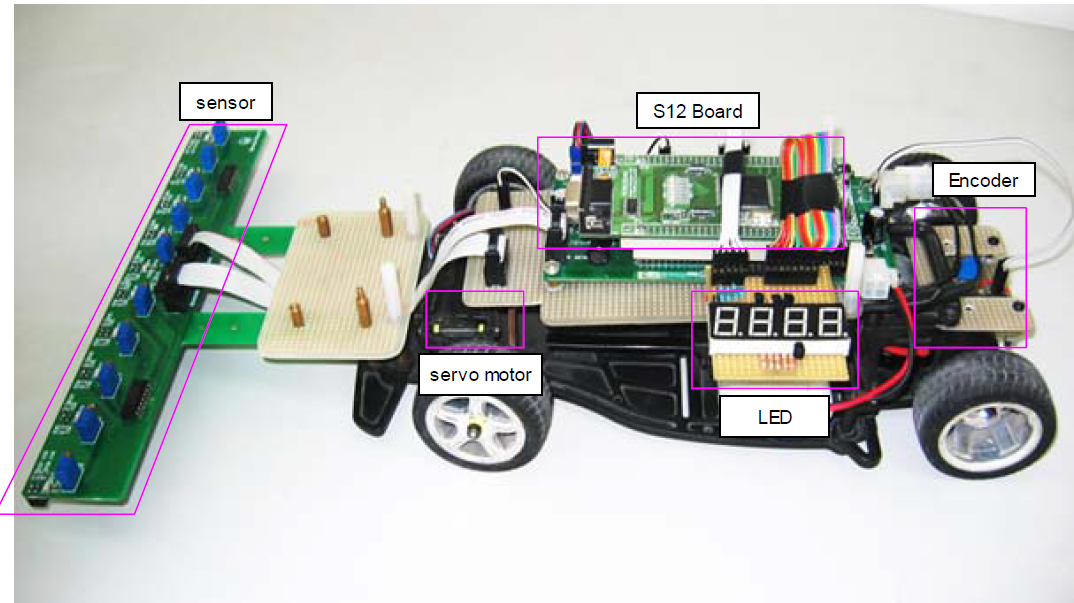
单片机模块采用Freescale公司的HCS12开发板,其中以MC9S12DG128B作为核心控制器。路径识别模块将采集到的路面导引线与车体位置的信息、转速测量模块测得的车速信息通过各自的接口送到单片机。单片机则根据这些信息,通过相应的软件算法对舵机与直流驱动电机进行控制,进而完成对小车方向与速度的控制,电源模块则向各个模块提供所需的电压与电流,并要保证系统稳定安全的运行。LED显示模块可以方便调试过程,例如能在小车运行时同时显示车速等相关信息。小车的外形及部分模块如图2.1所示。


声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章






