
资料下载


×
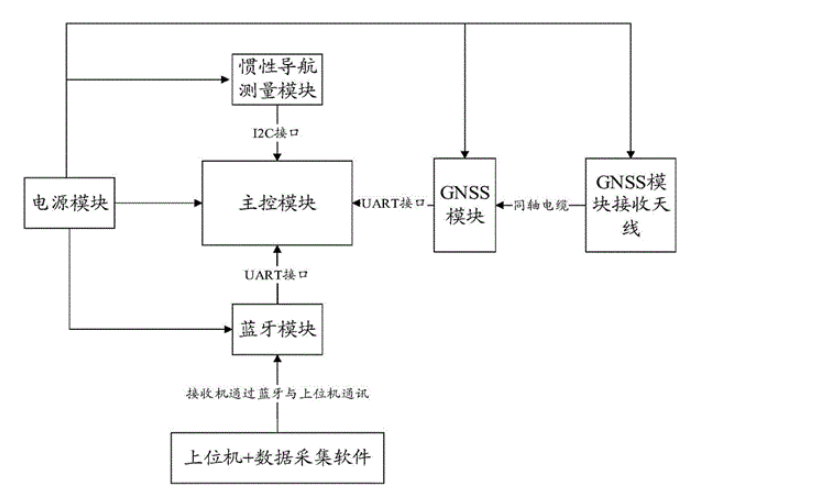
如何进行惯性导航系统的误差估计详细方法说明
消耗积分:0 |
格式:pdf |
大小:0.31 MB |
2019-09-19
192284244
分享资料个
惯性导航系统(INS)以其自主的工作能力广泛应用于军事武备的导航、制导与控制系统和国民经济的诸多领域。它的主要缺点是定位误差随其工作时间的增长而增大。对惯导系统的误差进行估计和补偿是在保证性能价格比的前提下,提高惯性导航系统精度的有效途径。目前,对惯导系统的误差修正均采用外信息(如 GPS 的输出信息)校正, 即在 INS 工作的全部时间内,定期地利用 GPS 输出的速度和位置信息与 INS 输出的相应信息的差值作为观测量, 对 INS 误差进行估计和补偿。Kalman 滤波的方法广泛地应用于惯导系统的误差修正初始对准。本文研究了当地水平惯导系统的的误差估计和补偿问题。分析结果表明,采用 Kalman 滤波的方法,可以精确地估计惯导系统的误差(包括陀螺漂移和加速度计零偏),误差估计的精度高,并且估计的方差阵收敛快。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
评论(0)
发评论
- 相关下载
- 相关文章




