

自制外骨骼臂DIY图解
电子说
描述
步骤1:关于Exo-Arm的更多信息
每当我们收缩或放松手臂时,手臂表面都会产生神经电势
•运动单元动作电位(MUAP)。 •幅度约为0-10毫伏
•频率在0-500Hz之间。
•此MUAP是该项目的核心,也是EMG处理的基础。/p》
外骨骼臂
•这是一个可以戴在生物臂上的外部框架
•它使用无创方法来从肌肉获得MUAP以控制可以戴在生物手臂上的框架。
•由高扭矩伺服电机提供动力。
•可以提供帮助或增强肌肉的力量生物臂,具体取决于伺服电机的扭矩
。 •肌电图(EMG)是借助外骨骼(EXO)进行人机界面(HMI)的合适方法。
步骤2:必需的硬件工具:
单击链接以转到可以购买项目
1)1x微控制器板:EVAL-ADuCM360精密模拟微控制器(Analog Devices Inc.)此微控制器板在我们的项目中用作控制外骨骼手臂的大脑。此过程将用于将我们的EMG传感器与手臂(伺服电机)连接。
2)1x AD620AN:(Analog Devices Inc.)它从EMG电极接收信号并提供差分增益作为输出。
3)2x运算放大器:ADTL082/84(Analog Devices Inc.)对差分放大器的输出进行整流,然后将该输出馈入低通滤波器,然后馈入增益放大器。 p》
4)1x SERVO MOTORS :180 kg * cm扭矩。
5)3x EMG电缆和电极:用于获取信号。
6)2x电池和充电器:两个11.2V,5Ah锂电池,将用于为伺服器供电。两块9V电池为EMG电路供电。
7)用于框架设计的1x1米铝板(3毫米厚)。
电阻器
•5x 100 kOhm 1%
•1x 150 Ohm 1%
•3x 1 kOhm 1%
•1x 10 kOhm微调
电容器
•1x 22.0 nF Tant
•1x 0.01 uF陶瓷盘
其他
•2x 1N4148二极管
•跳线
•1x示波器
•1x万用表
•螺母和螺栓
•魔术贴带
•垫填充泡沫
注意:
a)您可以选择任何首选的微控制器,但它应该具有ADC和PWM引脚。
b)可以使用OP-AMP TL084(DIP封装)代替ADTL082/84(SOIC封装)。
c)如果您不想构建EMG传感器,请单击此处EMG传感器。
第3步:使用的软件:
1)KEIL uVision用于编译代码和监视信号。
2)多isim用于电路设计和仿真。
3)Blender用于框架的3D仿真。
4)Arduino和用于实际传感器仿真测试的处理。
第4步:方法论
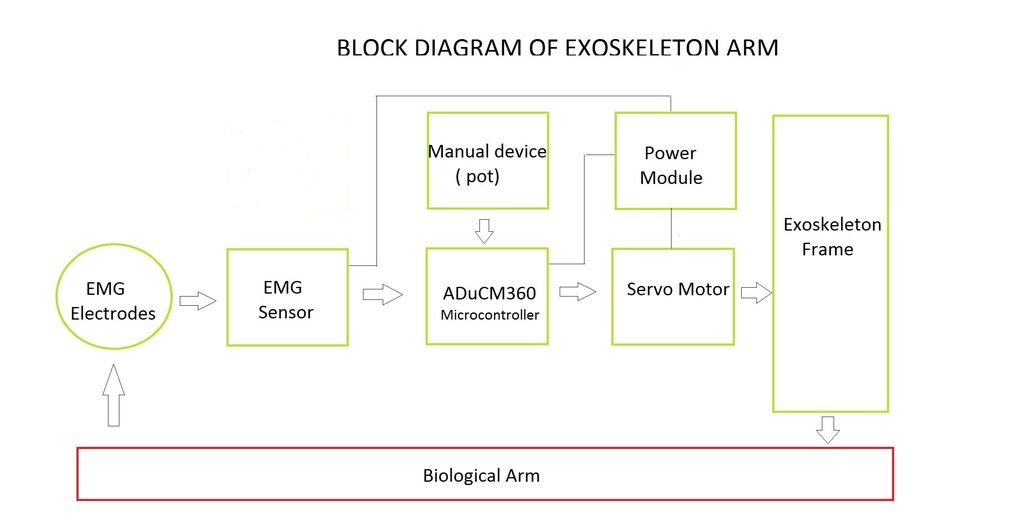
外骨骼臂工作在两种模式下。第一种模式是自动模式,其中信号处理后的EMG信号将命令伺服系统,第二种是手动模式
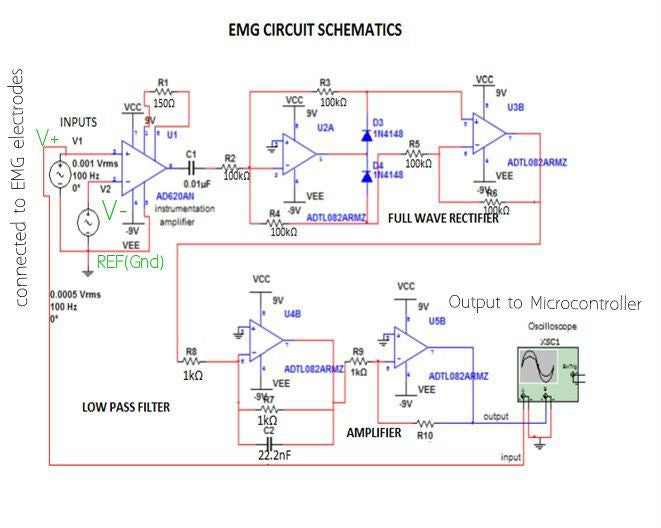
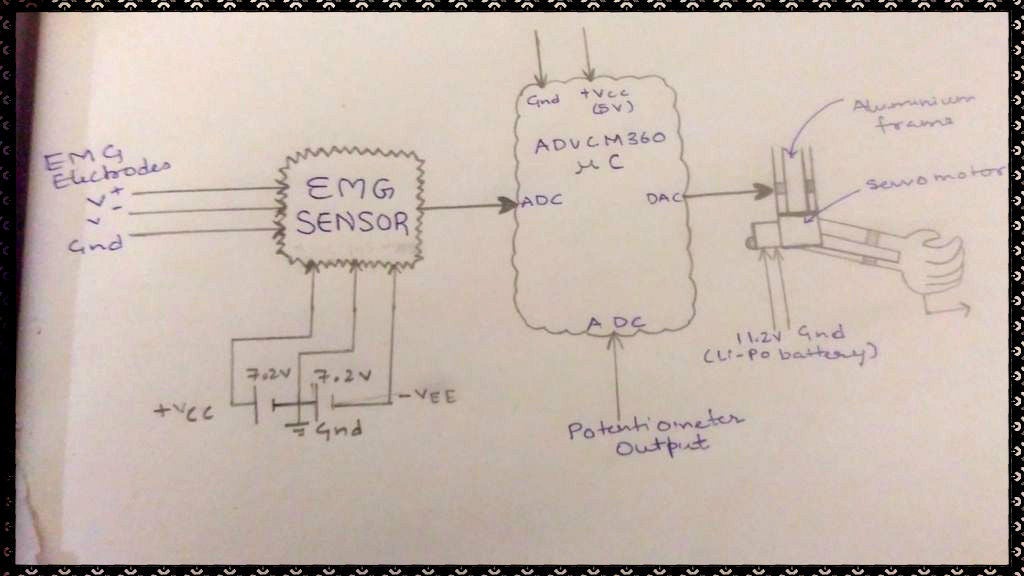
步骤5:EMG电路
步骤6:EMG信号处理和传感器测试的各个阶段:

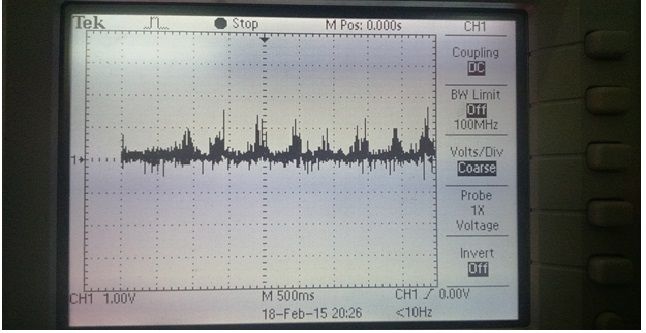
1)信号采集:电机单元从患者手臂的二头肌和三头肌获取动作电位(MUAP)信号。在此过程中使用了三个EMG电极。将两个EMG电极放在二头肌和三头肌上,一个放在肘部上作为接地参考。采集的信号被馈送到高质量仪表放大器AD620。会放大(增益= 500)有源电极之间的电位差。
仪表放大器的增益G = 1 + 49.9KOhms/R
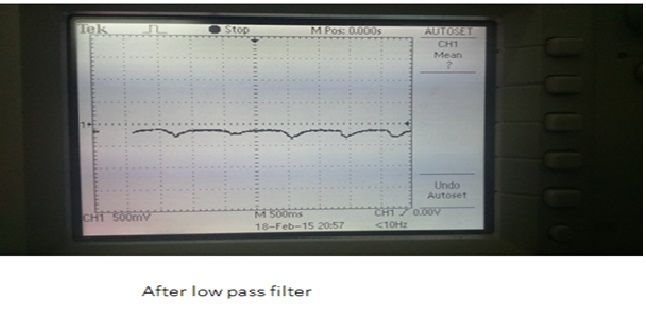
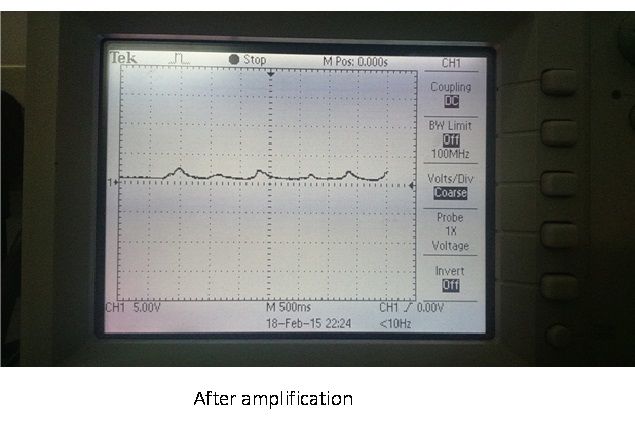
精度全波整流器将削除不需要的负半信号
2)滤波和放大:然后将放大后的信号馈送到直流耦合电容器和全波整流器消除了直流误差偏移和负半周期,使信号与微控制器兼容。然后,该整流信号通过低通滤波器以消除高频并形成信号的包络线。信号被发送到具有可变增益的放大器中以进一步放大。所有阶段均使用ADTL084运放进行设计
运放增益Vout/Vin = -Rf/Rin
我们启动了传感器
数据采集:
放大后的信号被馈送到微控制器EVAL-ADuCM360 PRECISION ANALOG。模拟电压由微控制器中存在的超高精度24位ADC读取。数据以2.450 kHz的速率采样。使用ADC斩波方案。这种斩波方案具有出色的直流失调和失调漂移指标,在需要漂移和噪声抑制的应用中极为有利。从肌肉输出放松时获得的偏移量从ADC输出中减去
控制逻辑:由于最后阶段需要抑制噪声,因此将ADC输出线性映射到DAC避免。我们创建了一个查找表,该表将离散值写入DAC。无需为低压模拟信号创建条件,以免不必要地激活伺服。在测试后,最大电压的阈值是手动设置的,因为每个测试对象都不同。
DAC:微控制器带有一个12位DAC。 DAC有两个可选范围:0至1.2 V和0至1.8V。巧合的是,向伺服电机输入1.8V电压可为伺服电机提供最佳旋转角度。使用此范围是因为它不需要进一步放大。我们使用了DAC插值模式。插值模式使用16位。数据写入使用12位,插值使用4位。
伺服电机:伺服电机的扭矩为180kgcm。它在脉冲宽度调制和电位计模式(模拟信号)两种模式下运行。我们使用模拟模式是因为与PWM相比,它更易于监视和分析。输入5V时,伺服旋转270度。它在14V至30V的电压下运行。30V可获得最大扭矩。
我们随附了代码 和重要的数据表
第7步:背包和连接
步骤8:框架设计
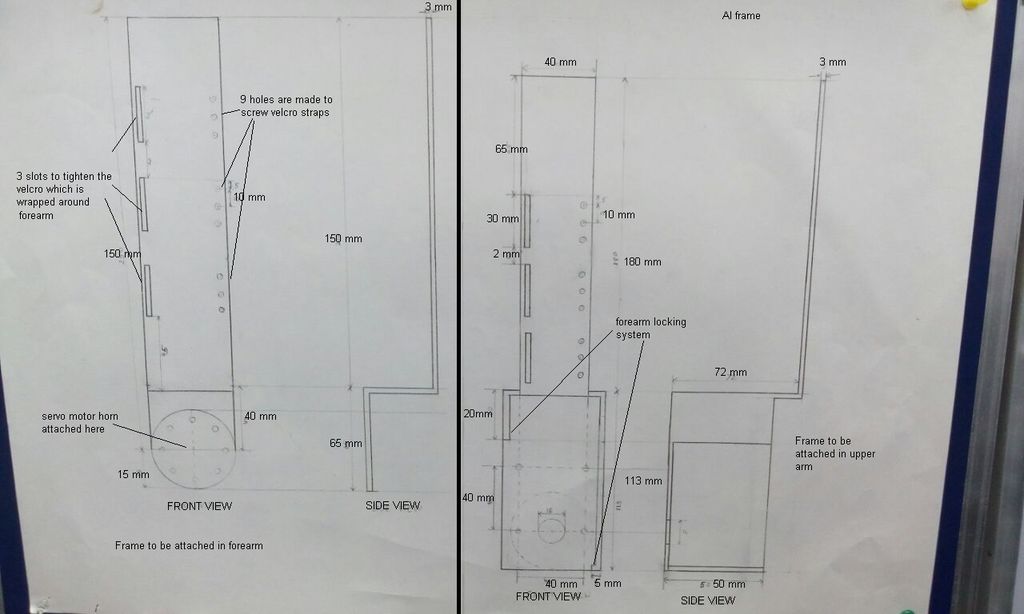
最初,我们在Blender软件中设计了框架,这里是一些设计
最终,我们将伺服电机直接放在上臂和前臂铝制框架的枢轴点,以减少复杂性和时间消耗,并且一如既往的安全第一!因此,我们还设计了一种锁定系统,该系统仅允许前臂移动45度至175度。
步骤9:最终测试!!!
责任编辑:wv
-
机械外骨骼传感器采用压力传感设计2016-04-27 0
-
继续:外骨骼压力传感器测试22016-05-06 0
-
浅析外骨骼机器人技术2019-04-28 0
-
【MAX40056申请】外骨骼助行器2019-09-19 0
-
怎样去设计一种基于虚拟现实的运动跟踪功能的上臂外骨骼2021-09-01 0
-
京东物流人员穿戴外骨骼机器人曝光,工业外骨骼迎来春天2017-11-14 10311
-
如何自制手机充电宝?DIY图解步骤2018-01-18 27143
-
日本Skeletonics外骨骼套装开售 穿上就变高达2018-04-09 3661
-
外骨骼研发设计应以使用者为出发2018-05-25 1635
-
外骨骼机器人的潜力如何2020-01-13 1874
-
基于TI处理器的外骨骼辅助康复机器人2021-06-25 553
-
外骨骼机器人的发展历程与未来发展2023-08-30 757
-
「黑科技」探索外骨骼机器人的创新之旅2023-09-12 345
-
探索外骨骼机器人的创新之旅2023-09-20 443
-
外骨骼机器人让残障人士重获行走自由2023-09-21 782
全部0条评论

快来发表一下你的评论吧 !
