

如何使用Arduino UNO和步进电机创建自动伦敦Bascule桥模型
电子说
描述
第1步:您需要的零件
对于此项目,您将需要:
1。压克力板
2。 1个步进电机
3。 1 x红外传感器
4。 1个Arduino UNO
5。 PCB板
6。 1个步进电机驱动器ULN2003A
7。一些吊环螺丝钩或滑轮
8。 2个门铰
9。 10个L括号
10。绳索或螺纹
步骤2:在Solidworks中准备设计(机械零件)
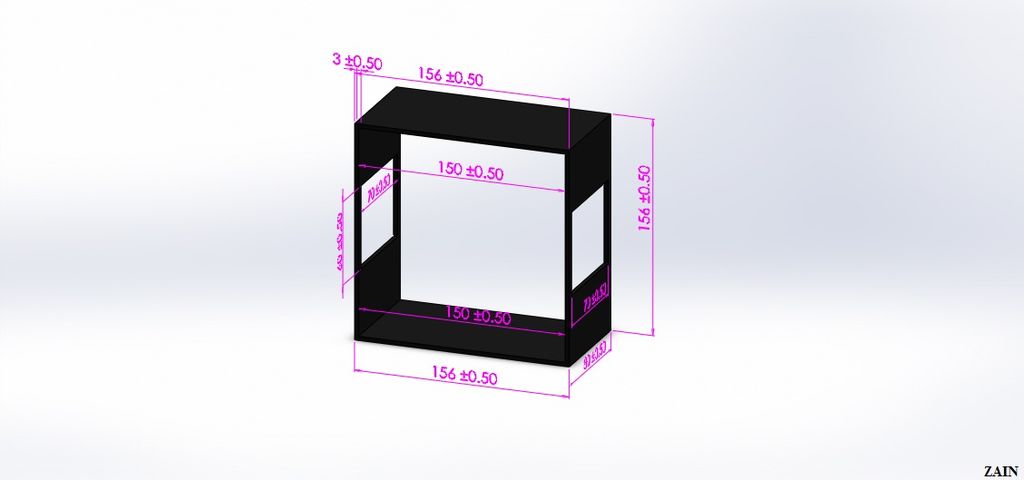
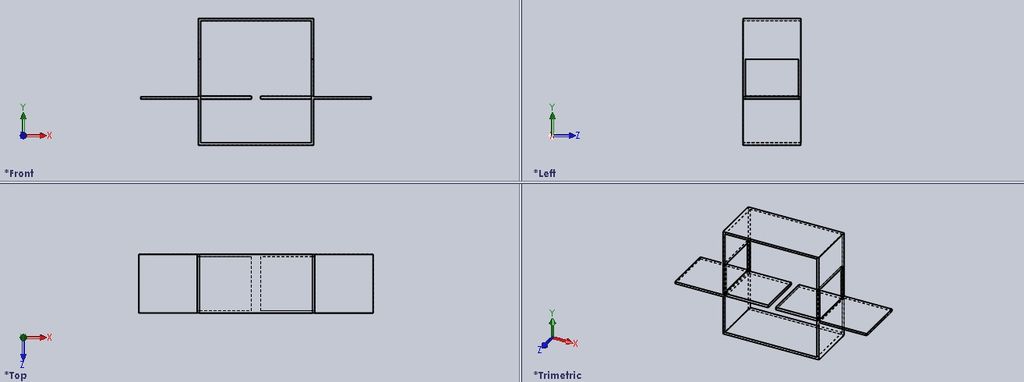
我使用Solidworks设计了整个模型。所有尺寸和图形均在文件中给出。
只需下载文件并在SolidWorks中打开它们即可。 :)
步骤3:准备电路(电子部分)
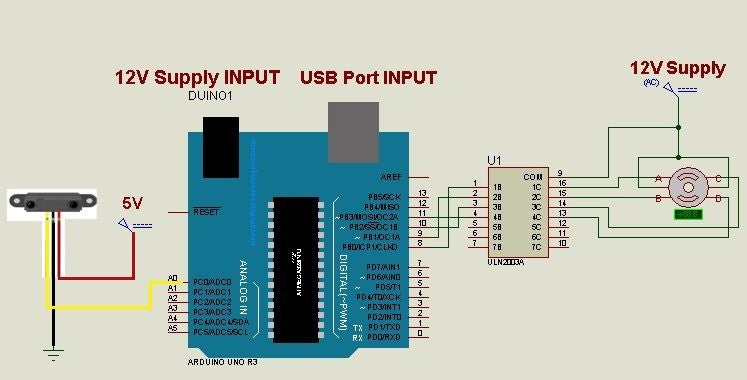
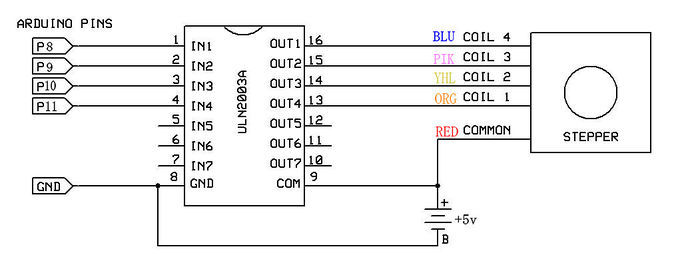
这一步也非常简单。我用Proteus制作电路。按照图中给出的示意图连接每根电线。我还附加了Proteus ISIS文件。
单极和双极电动机:
不同的步进电动机可以具有不同数量的导线,通常为4、5、6或8根导线。单极电动机通常具有从基座延伸的五,六或八根导线,每相一个线圈。在六线电机中,每个线圈对都有自己的中心抽头。单极步进电机可以转换为双极配置,其优点是与单极步进电机相比,双极步进电机可以承受更大的负载或扭矩。通常,双极步进电机有四根电线。有关更多详细信息和更多信息,请参见这些链接。
1。步进电机简介
2。如何使用步进电机
步骤4:软件和编码(Arduino IDE)
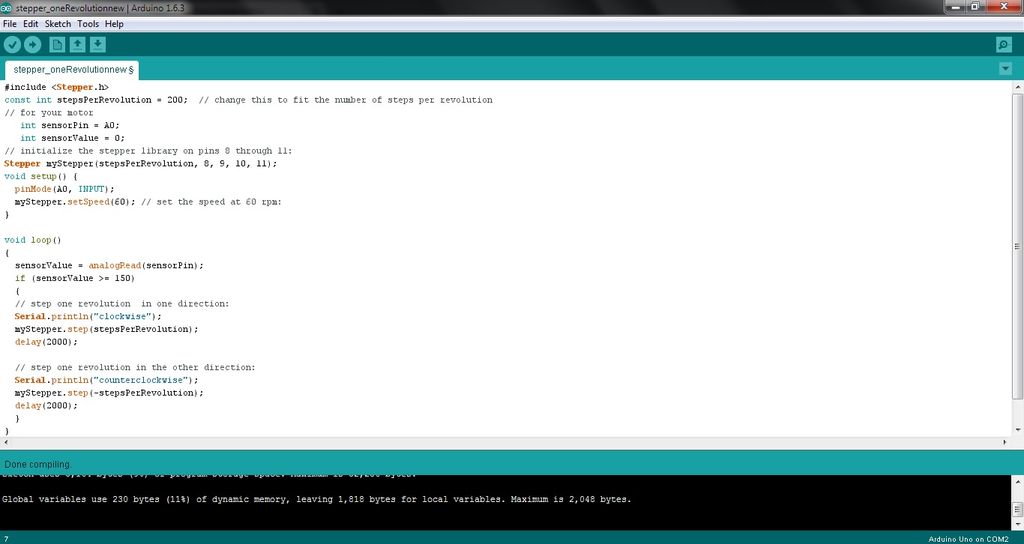
此是最后一步,硬件完成,我们可以开始编程。打开arduino IDE软件并复制下面的程序或下载Code.txt文件。通过usb电缆将您的arduino开发板连接起来,检查COM PORT,然后编译并将代码上传到连接到系统的Arduino。
代码:
#include
const int stepsPerRevolution = 200;//更改此值以适合电机的每转步数//
int sensorPin = A0;
int sensorValue = 0;
//初始化引脚8到11上的stepper库:
Stepper myStepper(stepsPerRevolution,8,9,10,11);
void setup()
{
pinMode(A0,INPUT);结果,myStepper.setSpeed(60);//将速度设置为60 rpm
}
void loop()
{
sensorValue = AnalogRead(sensorPin);
if(sensorValue》 = 150)//根据您与传感器的距离更改您的位置
{
//沿一个方向步进一圈:
Serial.println(“顺时针”);
myStepper.step(stepsPerRevolution);
延迟(2000);////您可以根据电动机的转速
//沿另一方向步进一转来更改延迟时间值:
Serial.println(“逆时针”);
myStepper.step(-stepsPerRevolution);
延迟(2000);
}
}
第5步:完成:D
责任编辑:wv
-
Arduino UNO+TB6600驱动器控制步进电机的正反转2021-06-28 0
-
Arduino UNO+TB6600驱动器按键控制步进电机启动停止 精选资料下载2021-07-08 0
-
如何连接双极步进电机到Arduino Uno板2021-08-31 0
-
如何使用Arduino UNO开发板控制步进电机2021-09-18 0
-
请问Arduino UNO如何利用电位器模拟输量输入控制步进电机调速?2021-10-19 0
-
Arduino Uno+步进电机28BYJ-48怎么实现摇头转圈等应用?2021-10-20 0
-
如何连接双极步进电机到Arduino Uno板?2021-10-28 0
-
TB5128 + Arduino UNO如何控制步进电机?2021-12-21 0
-
用于Arduino UNO兼容板的3个步进电机控制器载板2022-07-19 397
-
使用Arduino Uno和基本组件创建自动泡泡皂机2022-12-27 241
-
创建一个Arduino UNO闹钟2022-12-27 678
-
Arduino UNO使用库实现步进电机指定角度旋转2023-03-21 231
-
Arduino实验16步进电机的控制2023-03-21 189
-
基于Arduino Uno的步进音序器开源分享2023-07-07 141
全部0条评论

快来发表一下你的评论吧 !
