

伺服驱动器结构
伺服与控制
描述
伺服驱动器简介
伺服驱动器(servo drives)又称为“伺服控制器”、“伺服放大器”,是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服马达进行控制,实现高精度的传动系统定位,目前是传动技术的高端产品。
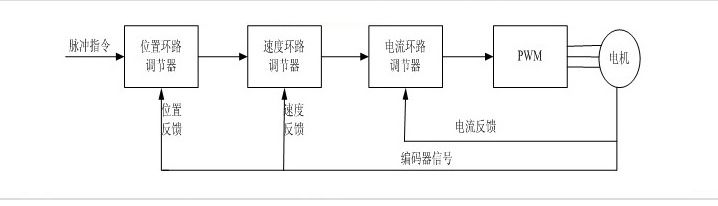
图1 伺服驱动器原理框图
伺服驱动器结构
伺服驱动器均采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,实现数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入了软启动电路,以减小启动过程对驱动器的冲击。
整流部:通过整流部,将交流电源变为直流电源,经电容滤波,产生平稳无脉动的直流电源。
逆变部:由控制部过来的SPWM信号,驱动IGBT,将直流电源变为SPWM波形,以驱动伺服电机。
控制部分:伺服单元采用全数字化结构,通过高性能的硬件支持,实现闭环控制的软件化,现在所有的伺服已采用(DSP数字信号处理)芯片,DSP,能够执行位置、速度、转矩和电流控制器的功能。给出PWM信号控制信号作用于功率驱动单元,并能够接收处理位置与电流反馈,具有通讯接口。
编码器:伺服电机配有高性能的转角测量编码器,可以精确测量转子的位置与电机的转速。
目前,伺服控制系统的输出器件越来越多地采用开关频率很高的新型功率半导体器件,主要有大功率晶体管(GTR)、功率场效应管 (MOSFET)和绝缘门极晶体管(IGPT)等。这些先进器件的应用显着地降低了伺服单元输出回路的功耗,提高了系统的响应速度,降低了运行噪声。
尤其值得一提的是,最新型的伺服控制系统已经开始使用一种把控制电路功能和大功率电子开关器件集成在一起的新型模块,称为智能控制功率模块(Intelligent Power Modules,简称IPM)。这种器件将输入隔离、能耗制动、过温、过压、过流保护及故障诊断等功能全部集成于一个不大的模块之中。其输入逻辑电平与TTL信号完全兼容,与微处理器的输出可以直接接口。它的应用显着地简化了伺服单元的设计,并实现了伺服系统的小型化和微型化。
结构组成
机电一体化的伺服控制系统的结构,类型繁多,但从自动控制理论的角度来分析,伺服控制系统一般包括控制器,被控对象,执行环节,检测环节,比较环节等五部分。
比较环节
比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现。
控制器
控制器通常是计算机或PID控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
执行环节
执行环节的作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作。机电一体化系统中的执行元件一般指各种电机或液压,气动伺服机构等。
被控对象
机械参数量包括位移,速度,加速度,力,和力矩为被控对象。
检测环节
检测环节是指能够对输出进行测量并转换成比较环节所需要的量纲的装置,一般包括传感器和转换电路。
-
伺服驱动器工作原理2017-03-20 0
-
伺服系统的组成.pdf2021-07-12 0
-
基于SPMC75F2313A的直流伺服驱动器2009-09-19 1458
-
基于单片机的直流伺服驱动器2012-06-06 3958
-
基于VS伺服驱动器结构及安装2017-09-23 801
-
基于GTSD13伺服驱动器的结构及功能2017-10-02 702
-
基于TS−K同步伺服驱动器原理及结构2017-10-02 607
-
基于V6-H-M1伺服驱动器结构及应用2017-10-02 756
-
LS系列伺服驱动器结构及安装2017-10-25 880
-
浅谈伺服驱动器的结构及其原理应用2018-09-24 8625
-
伺服驱动器怎样维修_伺服驱动器维修技巧2019-05-07 19063
-
伺服驱动器的工作原理_伺服驱动器内部结构2019-10-07 49834
-
伺服驱动器是什么?2022-12-02 1811
-
可替换Altera EP4CE10F17I7N的国产FPGAM5C06N3SF256助力伺服驱动器2022-05-27 854
-
伺服驱动器结构功能图和接线图2023-06-29 6213
全部0条评论

快来发表一下你的评论吧 !
