

dfrobot10自由度惯性导航模块简介
描述

产品简介
先来说惯性导航元件(IMU),这是一种可以测量飞行器速度、磁向角和重力加速度的电子器件,融合了加速度计、陀螺仪和磁罗盘。现在惯性导航元件已经用在人机交互领域的导航,和SegWay公司的单人双轮电动车的自平衡技术。
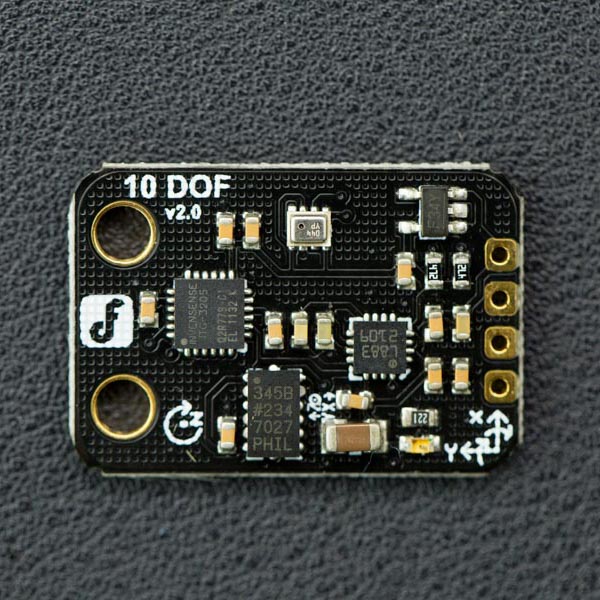
采用DFrobot的高集成度低成本的10自由度传感器。集合了ADXL345加速度计、HMC5883L磁罗盘、ITG3205陀螺仪以及BMP280气压传感器和温度传感器。它小巧玲珑的身材能够适合大多数控制系统要求,它设计精巧的安装孔也使传感器的数据更加精确和可靠。内置了低噪声的低压线性稳压器,还扩展了电源电压输入范围,支持3V-5V电源电压。当然了,10自由度IMU也可以直接和Arduino控制板兼容。
版本升级:V2.0升级了大气压传感器,从BMP085升级至BMP280,带温度与气压双重数据监测。
应用举例
多轴飞行器
自平衡机器人
室内惯性导航
高度计
人机互动(HCI)
技术特性
宽电源电压输入范围从3V-5V
低噪声低压稳压器
低成本IMU
接口:I2C
M3x2 安装孔可以很好的适应你的移动平台、机器人、HCI或无人机
LED电源指示
集成10自由度传感器
ADXL345 加速度计
ITG3205 陀螺仪
HMC5883L 磁罗盘
BMP0280 气压传感器和温度传感器
紧凑的设计非常易于使用
与Arduino控制板兼容
金色PCB线
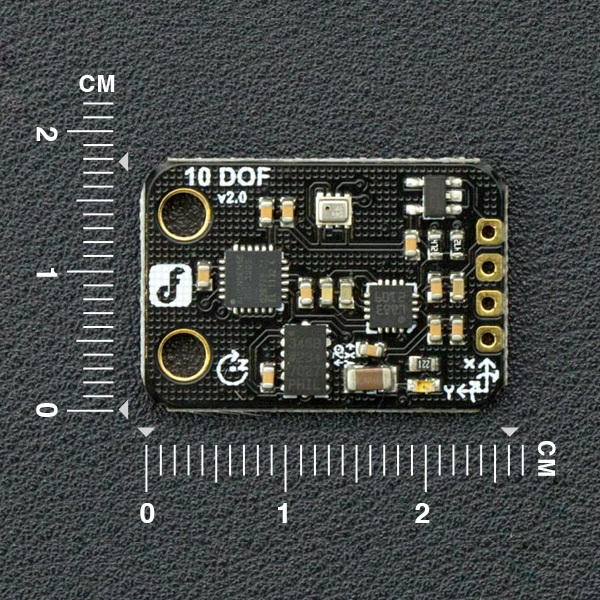
尺寸:26x18mm
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
高性能单片机车载惯性和GPS组合导航模块2017-08-30 0
-
ADI 6自由度惯性传感器2018-11-16 0
-
GPS北斗卫星+惯性组合导航模块的优势分析2019-07-15 0
-
惯性导航模块特征和 优势有哪些?2020-08-13 0
-
北斗导航模块UM2202016-03-03 2208
-
GNSS+INS惯性导航模块SKM-4DX资料下载2018-03-15 986
-
惯性导航模块SKM-4DX使用说明pdf下载2018-03-15 969
-
惯性导航和GPS卫星导航结合的车载组合导航模块资料2018-03-21 1178
-
惯性导航+GPS北斗导航一体的车载组合导航模块规格书2018-03-22 1172
-
一文读懂组合导航模块2018-04-23 4021
-
看GPS+惯性组合导航模块怎么解决传统GPS导航5大信号难题2018-07-16 8090
-
揭秘:GPS北斗卫星+惯性组合导航模块有哪些优势呢?2018-09-26 4506
-
卫星+惯性导航模块SKM-4DX的路测数据报告展示(公交导航测试篇)2018-09-26 3109
-
ADIS16407:十自由度惯性传感器数据表2021-05-09 532
-
ADIS16365:六自由度惯性传感器数据表2021-05-23 560
全部0条评论

快来发表一下你的评论吧 !
