

如何使用单片机模拟PT2262软件解码的方法说明
电子说
描述
在无线遥控领域,PT2262/2272是目前最常用的芯片之一,但由于芯片要求配对使用,在很大程度上影响了该芯片的使用,笔者从PT2262波形特征入手,结合应用实际,提出软件解码的方法和具体措施。
一、概述
PT2262/2272是一种CMOS工艺制造的低功耗低价位通用编解码电路,是目前在无线通讯电路中作地址编码识别最常用的芯片之一。PT2262/2272最多可有12位(A0-A11)三态地址端管脚(悬空,接高电平,接低电平),任意组合可提供531441地址码,PT2262最多可有6位(D0-D5)数据端管脚,设定的地址码和数据码从17脚串行输出。
PT2262/2272必须用相同地址码配对使用,当需要增加一个通讯机时,用户不得不求助于技术人员或厂家来设置相同地址码,客户自己设置相对比较麻烦,尤其对不懂电子的人来说。随着人们对操作的要求越来越高,PT2262/2272的这种配对使用严重制约着使用的方便性,人们不断地要求使用一种无须请教专业人士,无须使用特殊工具,任何人都可以操作的方便的手段来弥补PT2262/2272的缺陷,这就是PT2262软件解码。
二、解码原理
上面是PT2262的一段波形,可以看到一组一组的字码,每组字码之间有同步码隔开,所以我们如果用单片机软件解码时,程序只要判断出同步码,然后对后面的字码进行脉冲宽度识别即可。
2262每次发射时至少发射4组字码,2272只有在连续两次检测到相同的地址码加数据码时才会把数据码中的“1”驱动相应的数据输出端为高电平和驱动VT端同步为高电平。因为无线发射的特点,第一组字码非常容易受零电平干扰,往往会产生误码,所以程序可以丢弃处理。
下面我们来仔细看一下PT2262的波形特征:
振荡频率 f=2*1000*16/Rosc(kΩ) kHz 其中Rosc为振荡电阻 这里我们选用的是一种比较常用的频率f≈10 kHz, Rosc=3.3MΩ(以下同)。下图是振荡频率与码位波形的对应关系:同步码头波形:
PT2262有三种编码:0,1,和悬空(表示为f)。
1、 数据“0”发送的码位如下:
2、 数据“1”发送的码位如下:
3、 数据“f”发送的码位如下:
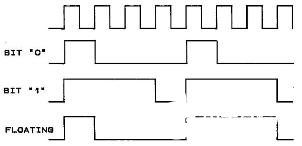
有了以上具体的波形,我们就可以进行软件解码了。T2262每次至少发送4次编码,首先我们可以通过检测11ms宽度的同步码头,有码头才开始进行编码解码,无码头则继续等待。当收到码头时,还要检测是否已经收到过码头,若无,则丢弃第一次编码的信号,以防止误码。
从编码图中可以看出,每一位码字都是从低电平开始到高电平,到低电平,再到高电平。为了检测方便,在接收端我们把编码信号进行了180°倒相,使码位开始的上升沿转化为下降沿,这样当我们使用MCS51系列单片机解码时可使用中断方式及时截获编码。从编码图中还可以看出,每一位码字都可以分成两段,我们以每段中的电平宽度来描述码位:
码位 第一段 第二段 数值表示 反码表示
0 窄 窄 00 11
1 宽 宽 11 00
f 窄 宽 01 10
无效码 宽 窄 10 01
软件解码方法1(反码):
从第一个下降沿开始延时700us左右,检测电平高低,记为A1,再检测第二个下降沿,延时700us左右,检测电平高低,记为A2,这样一个码位就可以译出来了,连续检测12个码位。
软件解码方法2(反码):
从第一个下降沿开始记时,并不断检测电平变化,一有电平变化,立即记录电平宽度B1,再继续记时直至出现第二个下降沿,记录两个下降沿的间隔B2,重复以上步骤,得到B3,B4,判断B1,B2,B3,B4是否在各自允许的误差范围内,是则保存B1,B3,译出一个码位,否则认为误码,丢弃。连续正确检测12个码位。
两种解码方式各有优缺点如下:
解码方式 优点 缺点
1 程序简单,CPU开销少 解码精度差
2 程序复杂,CPU开销大 解码精度较高
为了获得较高的解码精度,我们推荐使用方法2,以避免大量的干扰信号的误解码。
三、参考解码软件
;软件解码程序(仿真PT2272) ; ;晶体频率为11.0592Mhz ;
;本程序中的时间定位关系只适用于接3.3M振荡电阻的PT2262解码 ;
;使用其它阻值电阻时,应将定位时间按电阻比例缩放 ;下面的程序中 REM 为信号输入端 ;
;RECEIVE 检测到有效信号标志位 ;
;ENABLE_DETE 连续按键标志 ;
;3AH,3BH用作定时器 ; ;
;PT2262共12根地址线 ; ;31H,32H:接收的前8 位地址编码 ;
;33H,30H:接收的后4 位地址编码(若最后4位用作数据端,则只须读第33H单元的内容即可) ;
;当用作数据端时,PT2262对应脚悬空被认为是低电平。
;地址数据说明 ; ;以31H.0 和32H.0 为例 ;
;悬空 : 31H.0=0 32H.0=1 ; ; 1: 31H.0=1 32H.0=1 ; ; 0: 31H.0=0 32H.0=0 ;
;出错 31H.0=1 32H.0=0 ; ; ;
; 说明:为了能可靠检测到有效信号,建议每次接收至少检测3次,然后比较3次检测值
;3次值相同才认为收到了正确信号。可在主程序中如下处理:第1次检测时调用REMOTE
;第2、3次检测时调用REMOTES,请注意必需连续调用,否则得不到正确的数据 ; ;
;注意:将T1设定为16位定时器,允许中断,否则将导致接收数据错误
REMOTE: CLR RECEIVE ; ;检测50ms 内有没有编码接收 ;
MOV 3AH,#55 ;
REMOTEA: MOV 3BH,#250 ;
REMOTEB: JB REM,REMOTE0 ;有码发送则跳转
DJNZ 3BH,REMOTEB ;
DJNZ 3AH,REMOTEA ;
REMOTE_END_1: CLR ENABLE_DETE ;
REMOTE_END: CLR REMOTING ;清除探头检测标志
RET ;
REMOTE0: JB ENABLE_DETE,REMOTE_END_1;按键没有放开则返回
REMOTES: MOV 34H,#12 ;接收12位编码 ;解码 ; ;先找出接收码的开头即10ms左右的高电平 ;
MOV TH1,#00H ; ;设置高电平时间为8~12ms ; ;检测和等待8ms 的 低电平,70ms门限 ;
CLR T_OVER ;
MOV TL1,#00H ;
SETB TR1 ;
REMOTE1: MOV 3AH,#50 ;
REMOTE2: MOV 3BH,#25 ;
REMOTE3: JB REM,REMOTE1 ;
JB T_OVER,REMOTE_END ;
DJNZ 3BH,REMOTE3 ;
DJNZ 3AH,REMOTE2 ; ; ;等待在4ms 内接收到的高电平 ;
CLR T_OVER ;
MOV TH1,#0F1H ;
MOV TL1,#0F0H ;
SETB TR1 ;
REMOTE_4: JB T_OVER,REMOTE_5 ;
JNB REM,REMOTE_4 ;
CLR TR1 ;
AJMP REMOTE6 ; ;超出12ms 接收错误返回 ;
REMOTE_5: AJMP REMOTE_END ;
REMOTE6: MOV 3AH,#00 ; 等待550us 后采集接收信号 ;
DJNZ 3AH,$ ; ;采集接收信号并记录 ;
MOV C,REM ;
MOV A,33H ;
RLC A ;
MOV 33H,A ;
MOV A,31H ;
RLC A ;
MOV 31H,A ; ;等待第二个上升沿,限时1.5ms ;
CLR T_OVER ;
MOV TH1,#0FAH ;
MOV TL1,#099H ;
SETB TR1 ;
RM1: JB T_OVER,REMOTE_END ;
JB REM,RM1 ;
CLR TR1 ; ;
CLR T_OVER ;
MOV TH1,#0FAH ;
MOV TL1,#099H ;
SETB TR1 ;
RM2: JB T_OVER,REMOTE_END ;
JNB REM,RM2 ;
CLR TR1 ; ;等待550us 后采集接收信号 ;
MOV 3AH,#00 ;
DJNZ 3AH,$ ;
MOV C,REM ;
MOV A,30H ;
RLC A ;
MOV 30H,A ;
MOV A,32H ;
RLC A ;
MOV 32H,A ; ;等待第二个码值的上升沿 ;
CLR T_OVER ;
MOV TH1,#0FAH ;
MOV TL1,#099H ;
SETB TR1 ;
RM3: JB T_OVER,RM5 ;
JB REM,RM3 ;
CLR TR1 ; ;
CLR T_OVER ;
MOV TH1,#0FAH ;
MOV TL1,#099H ;
SETB TR1 ;
RM4: JB T_OVER,RM5 ;
JNB REM,RM4 ;
CLR TR1 ;
DJNZ 34H,REMOTE6 ; ;把接收的编码左移4 位将8 位密码放在同一字节上
MOV 34H,#4 ;
AJMP REMOTE7 ;
RM5: AJMP REMOTE_END ;
REMOTE7: CLR C ;
MOV A,33H ;
RLC A ;
MOV 33H,A ;
MOV A,31H ;
RLC A ;
MOV 31H,A ;
CLR C ;
MOV A,30H ;
RLC A ;
MOV 30H,A ;
MOV A,32H ;
RLC A ;
MOV 32H,A ;
DJNZ 34H,REMOTE7 ; ;把4 位数据编码由高4 位移到低4 位上 ;
MOV A,33H ;
SWAP A ;
MOV 33H,A ;
MOV A,30H ;
SWAP A ;
MOV 30H,A ;
SETB ENABLE_DETE ;
SETB RECEIVE ; ;
AJMP REMOTE_END_1 ;
END;
四、硬件抗干扰
在无线通讯中使用单片机会对通讯系统造成严重的干扰,相信许多技术人员一定有过同样的苦恼。如果硬件设计不当,会造成原先硬件解码时通讯距离为200米,而用软件解码后可能只有十几米,因此解决硬件抗干扰问题在很大程度上可减少软件解码的误码率。
1、收发模块:早期常用的频率为47MHz,在这种频率下,很难有好的解决方法;建议采用目前国家允许无线遥控使用的频率315 MHz。
2、单片机振荡频率:大量的MCS51教材中推荐大家使用的是12 MHz及11.0592MHz的晶体,这些晶体在一般场合使用没有问题,但在此却不可以,它们在300MHz左右仍然能够产生较大的干扰,为解决单片机运行速度与电磁干扰的矛盾,建议采用频率为4MHz或3.58MHz的晶体。
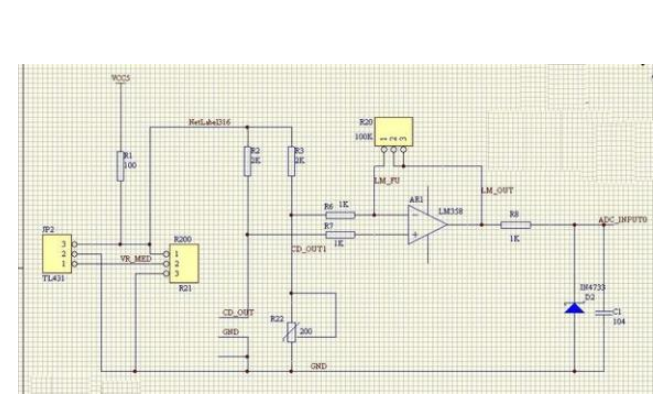
3、隔离:为了有效抑制单片机对接收模块的电磁干扰,建议采用①电源隔离;②端口隔离;端口隔离可采用三极管或比较器。实践表明采用隔离的效果非常明显。
五、结束语
PT2262的软件解码在实际应用中有较好的用武之地。采用软件解码的系统,厂家再也无须对收发设备进行配套,以利于生产于保管;对客户来说,使用软件解码无须求助,厂家只须再软件中加入自动学习功能,用户可自行使用该功能,只须轻按学习键即可学习新的通讯设备,如遥控器等。目前,该软件解码已经在某无线报警设备中采用,客户反映使用简便,效果良好。
责任编辑 LK
-
 随风飘荡
2022-06-09
0 回复 举报谢谢分享,学习 收起回复
随风飘荡
2022-06-09
0 回复 举报谢谢分享,学习 收起回复
-
PT2262解码2012-07-25 0
-
PT2262/PT22722012-08-03 0
-
有偿:用单片机通过315M模块实现PT2262编解码2012-09-24 0
-
关于PT2262解码问题2015-07-25 0
-
基于AVR单片机的PT2262软件解码程序分享2018-07-19 0
-
PT2262编码芯片的软件解码2010-04-07 1673
-
pt2262红外遥控解码电路2008-11-29 3978
-
PT2262/PT2272编解码集成电路原理说明2009-12-29 6497
-
用单片机模拟2272软件解码2010-01-25 2868
-
pt2262解码程序2017-10-23 2078
-
PT2262软件解码的单片机程序2017-11-14 2631
-
PT2262单片机解码思路和原理2017-11-14 7866
-
单片机实现PT2262解码示例代码2021-11-16 848
全部0条评论

快来发表一下你的评论吧 !
