

C4机器人与PLC的通信IO域更改扩展
描述
在全自动化生产线上,必须对过程进行监控和协调,例如状态监测和过程控制。这个任务通常由 PLC 来承担。为了使 PLC 和 KR C4 能通过 PROFINET互相通讯,WorkVisual项目必须相应地扩展。在 PLC 中必须同样存在一个 PROFINET 项目设置 — 该项目设置将KR C4 参数化为从属设备。KR C4 可以从两种不同的角度来配置。配置为具有 “ 标准 ” 输入 / 输出的 “ 标准 ” PROFINET 用户或者配置为具有安全输入 / 输出的PROFIsafe用户。
1. KR C4 的输出是PLC 的输入
2. KR C4 的输入 是PLC 的输出
3.数字输出先在PLC 端被写入 输出存储器,然后才被传输。PLC的数字输出在KRC4 端被存放在输入存储器中。
4.在 WorkVisual中,KRC4 输入存储器 和 KR C4 输入/ 输出端 之间的接线在接线显示器中配置。
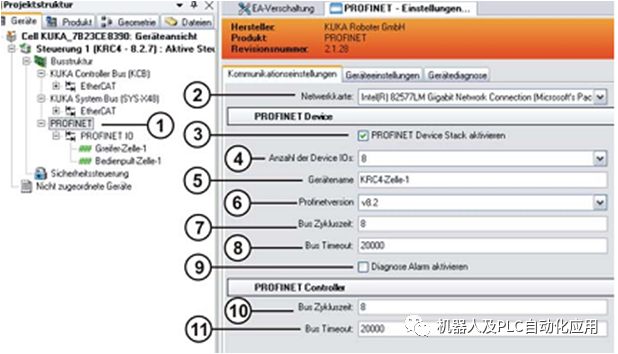
| 1 | ProfiNet(工业以太网) | DTM |
| 2 | 网卡 | 笔记本电脑的网卡,通过它与控制器相连接。 |
| 3 | ProfiNet堆栈 | 激活 PROFINET 设备栈 |
| 4 | 从属设备输入输出数量 | 用于 PLC 通讯的数字输入输出信道的数量。最多 2032 个 |
| 5 | 设备名称 | 用于 KR C4 的 PROFINET 设备名称 与 PLC 项目中的设备名称相同。 |
| 6 | ProfiNet版本 | 取决于 KSS 版本 (8.1 或 v8.2) |
| 7 | 从属设备运行时总线循环时间 | 在 ProfiNet中发送或者接收电报的节拍时间。 |
| 8 | 从属设备运行时总线超时 | 到 PLC 已完成 KR C4 初始化的最长允许时间,单位为毫秒若此时间已过而未成功,则将产生故障信息。 |
| 9 | 诊断警报 | |
| 10 | 总线循环时间--控制器 | 在 ProfiNet中发送或者接收电报的节拍时间。 |
| 11 | 总线超时--控制器 | 到 KR C4 已将所有从属总线模块初始化的最长允许时间,单位为毫秒。若此时间已过而未成功,则将产生故障信息。 |
下面让我突破VASS试一下。
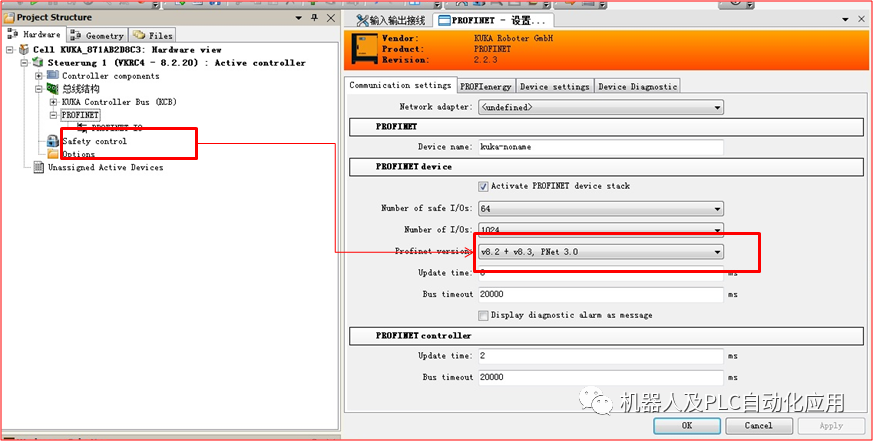
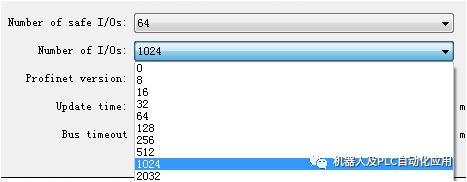
设置与上位机通讯的长度 : 可以改为1024(1024位)
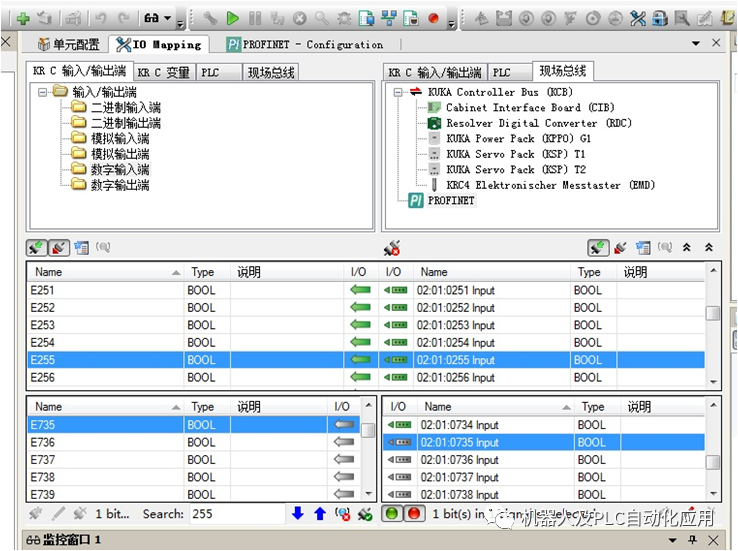
在机器人中分配IO到1024,让后编译下载到机器人,并在机器人中激活项目.
PLC程序中加入KUKA机器人的组态文件
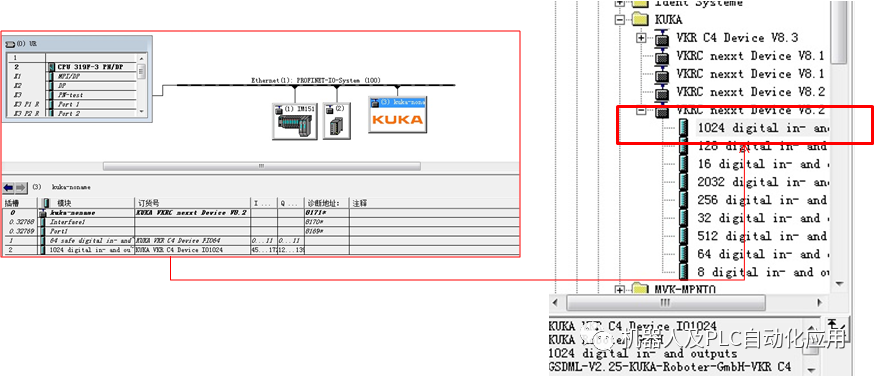
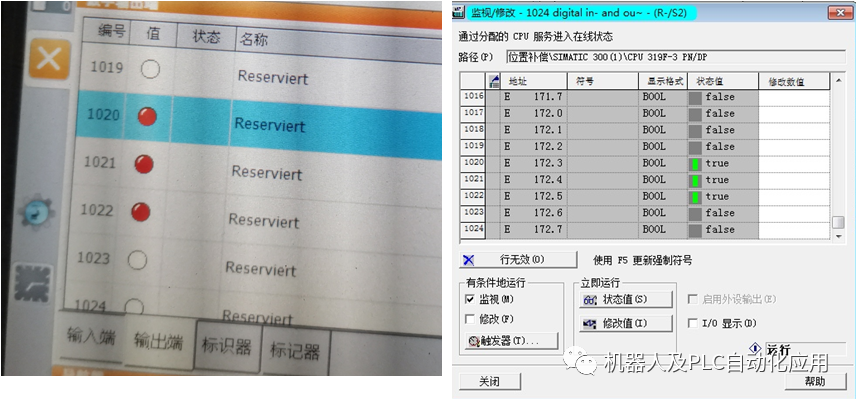
在标准通讯区,选择1024与机器人相对应,然后下载程序到PLC.
可以通过机器人给PLC发出信号,再通过PLC软件的监控功能,查看效果.
机器人编程结合练习:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人求路线啊2012-05-26 0
-
智能语音机器人2015-12-02 0
-
群舞蹈机器人表演2016-03-24 0
-
单片机教学机器人-鸥鹏科技2016-04-01 0
-
机器人弹钢琴2017-05-22 0
-
机器人基础书籍2019-05-22 0
-
上位机全套程序,上位机与机器人和PLC通讯都是通过以太网总线方式2021-07-01 0
-
最实用的STM32和ROS机器人的串口通信方案2021-08-20 0
-
库卡机器人MGV电源模块维修2021-09-08 0
-
KUKA机器人伺服驱动模块维修2021-09-17 0
-
通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现2023-02-24 0
-
C4机器人与PLC的通信IO域更改扩展2020-05-11 3302
全部0条评论

快来发表一下你的评论吧 !
