
资料下载


开关磁阻电机全速度范围无位置传感器控制系统研究与设计的论文说明
分享资料个
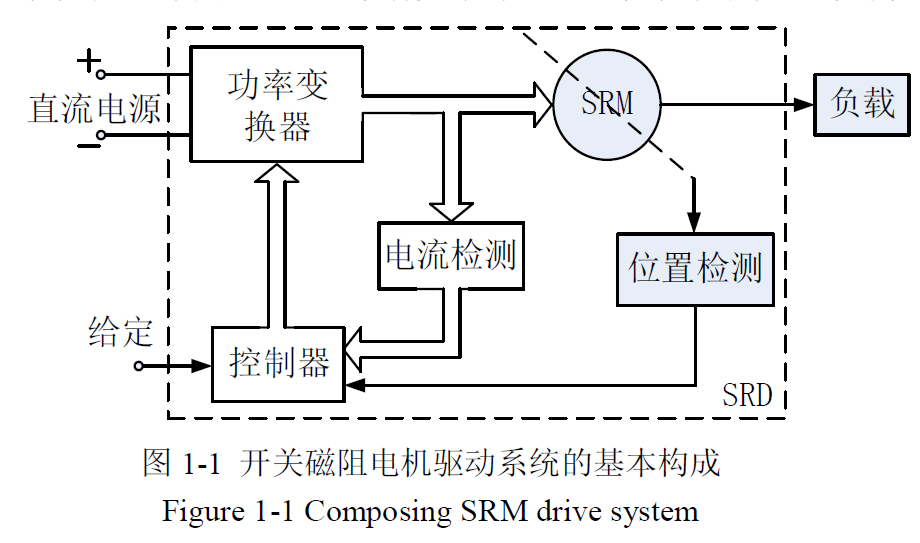
开关磁阻电机(SRM )具有结构简单、控制灵活、容错能力强等诸多优点而开关磁阻电机驱动系统( SRD )更是融合了交直流两大调速系统的优点,现已广泛应用于矿山开采、航空、电动车驱动、机床设备等诸多工业领域。而用 于检测转子位置信息的位置传感器给 SRD 带来了系统可靠性降低、安装调试不便、成本和复杂度增加等不利影响,成为 SRM 推广普及的瓶颈,因此, SRM 无位置传感器控制技术研究具有极为重要的工程实用意义。本文针对 SRM 启动及高低速驱动运行不同工作状态,研究了一种基于复平面电感模型无位置控制方案。本文首先对国内外在SRM 启动及驱动运行不同工作状态下转子位置检测技术的研究成果进行了总结,介绍了 SRM 工作原理、基础数学方程及数学模型,讨论了常用的控制策略和运行特性。
之后,本文采用了JMAG 有限元和半周期激励两种方法对 18 .5kW 实验样机进行了磁链特性曲线获取,给出了两种方法的磁链获取原理及步骤,并通过了JMAG 软件对 18.5kW SRM 的磁通密度和磁场强度进行了三维有限元仿真分析,此外,文章还对以上两种磁链获取方法得到的 18.5kW 样机磁链结果进行了分析。再次,本文针对SRM 启动、低速及高速驱动运行状态下转子位置检测问题,提出了一种基于复平面电感模型的全速度范围无位置传感器控制方案。文章从复平面电感模型与转子角度之间存在的函数关系入手对角度估计的原理进行了说明,并给出了利用 SRM 磁链特性求解复平面电感模型三项系数的方法, 进一步分析了不同扇区内角度估计的误差。在此基础之上,详细阐述了启动和低速驱动运行三相电感及高速驱动运行参考相电感获取方法,给出了各状态下参考相选择规律,分析了电感饱和效应对低速驱动运行时转子角度估计的影响,并采取了三项系数补偿措施以消除影响。通过 MATLAB 仿真对不同工作状态下转子位置检测方法的可行性进行了验证。此外,本文还给出了从启动、低速到高速驱动运行全速度范围无位置传感器控制方案,并对方案中的高低速无位置算法的切换策略进行了可行性仿真验证。
最后,本文介绍了无位置传感器实验平台的软硬件设计,并对提出的全速度范围无位置控制算法进行了全面的实验验证,验证结果表明本文提出的启动、低速及高速驱动各运行状态下的无位置传感器控制算法均具有较高可行性。

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。 举报投诉
- 相关下载
- 相关文章







