

机器人自动关机后如何自动开机,需要什么呢?
描述
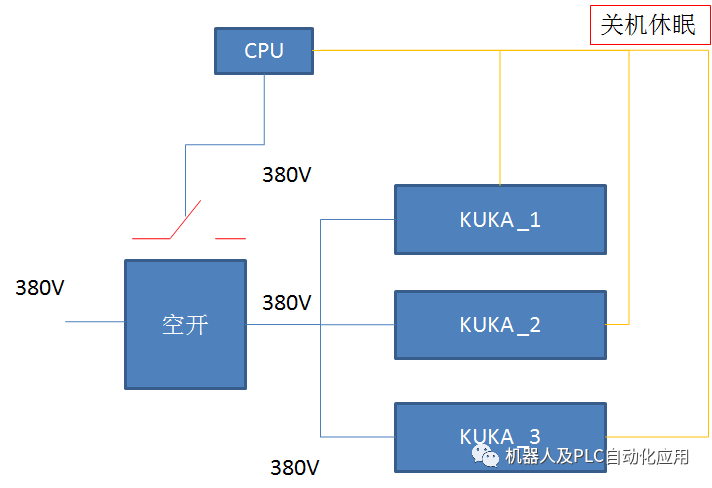
首先我们要知道机器人自动关机后如何自动开机,需要什么呢?我们需要一个可以由电信号控制的机器人电源回路的开关,配合机器人休眠时对机器人进行断电处理,并能控制开电使得机器人可以被及时唤醒.
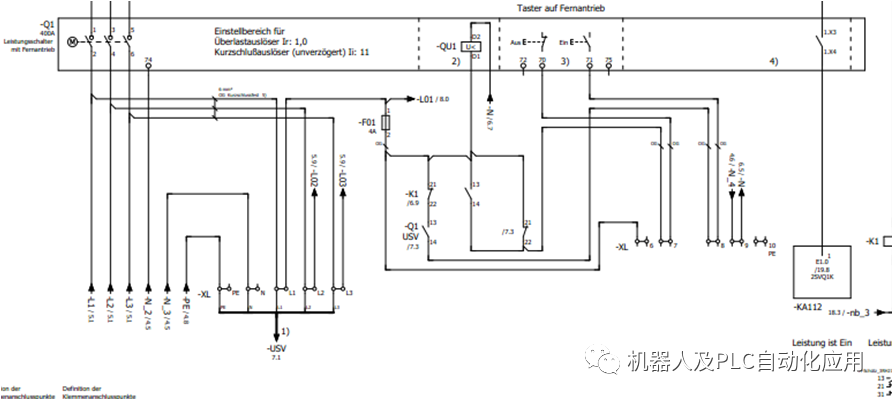
大众集团使用的可控电器开关,当然我们也可使用别的类型的.
例如:VASS 标准中的FB142就是用来控制关闭电源的,当然我们也可以自己改装,并编写程序实现.FB142只关闭机器人,变频器等380电源,不关闭24V控制电
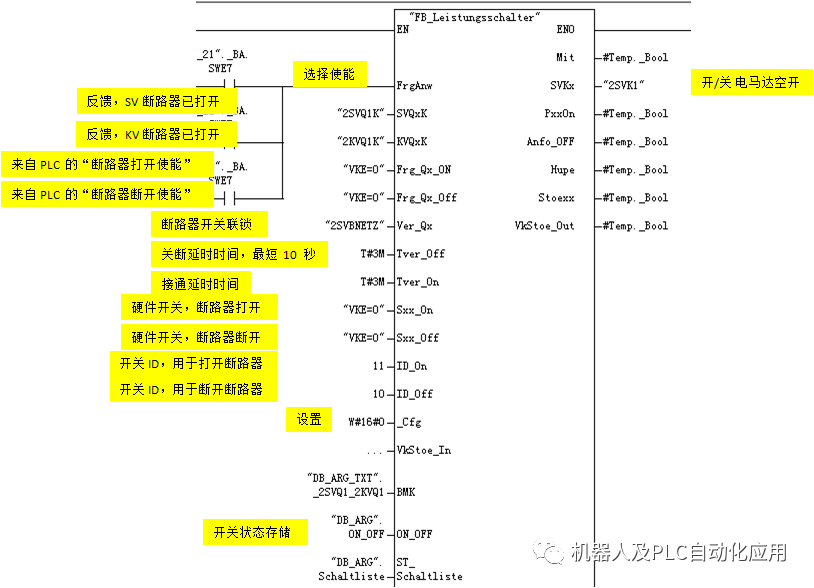
采用该块,可以以手动或自动方式切换电动断路器。自动切换取决于在项目中定义的开关ID 。采用 On_Off 结构重新打开某个设备后,该设备即处于关闭或启动就绪状态。Cfg.X1 = True 只激活对 SV 断路器的监控功能。
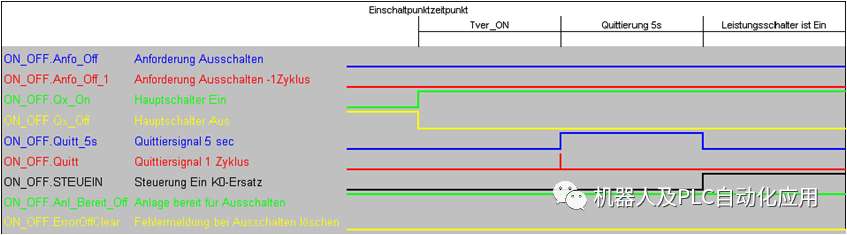
打开流程
无论采用哪种切换方法,打开流程都如下所示:
块输出 "SVKx" 变成 False ; 从而打开电动断路器。与此同时,接通延时时间 "Tver_On" 开始计时。计时结束时,通过 On_Off 结构输出确认信号(True)。On_Off.Quitt 持续一个 PLC 循环;On_Off.Quitt_5s 持续 5 秒。多种不同确认信号要用到这些信号。确认完成时,On_Off.STEUEIN被设置成 True。
最小断开时间为 2.5 分钟。该时间必须确保所有装置都正常地关机。
打开期间的 On_Off 结构信号的处理:
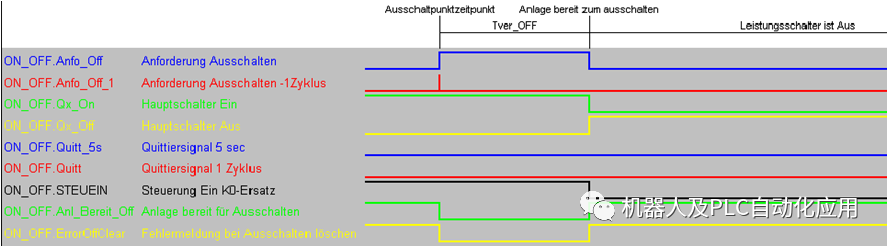
断开流程
一旦通过可视化功能启动了断开流程,计时时间"Tver_Off" 就开始计时。在该时间内,机器人必须通过输出 A30 向 PLC 返回一个 True 信号。若如此,则未给它们分配任何其它顺序,且它们进行断开就绪状态。但是,如果机器人未通过输出A30 返回 True 信号,则中止断开流程。A30 上没有反馈信号时,如果仍想进行断开操作,可以按可视化功能上的断开按钮 4 秒钟以上。自动处理期间,不需要先向机器人发出请求,机器人即返回A30 信号。
如果 "CfgX0" = True ,将忽略反馈信号 On_Off.Anl_Bereit_Off。此时,将立即执行关闭过程。
关闭成功时 On_Off 结构的信号处理
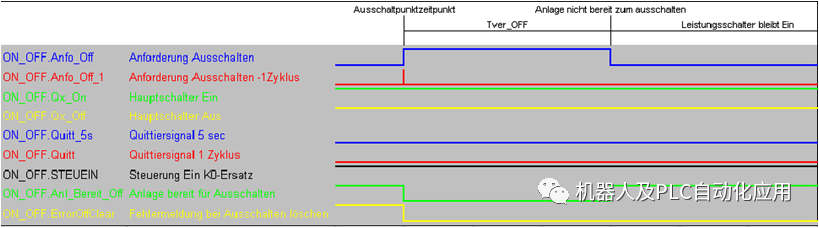
关闭过程被中止时 On_Off 结构的信号处理
FB142电源控制激活ON_OFF 功能
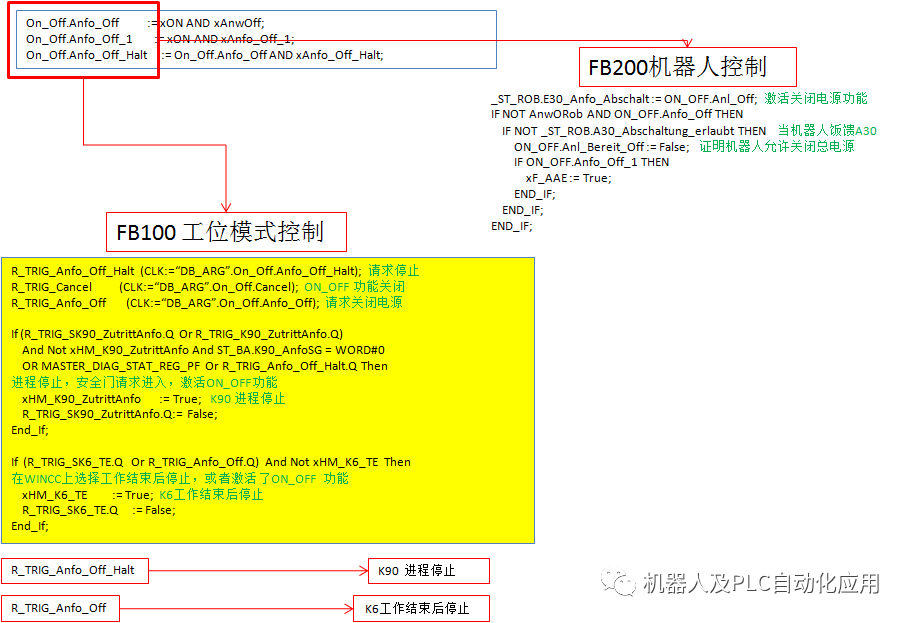
FB142电源控制激活ON_OFF 功能
-
[求助]康佳p29a5386开机自动关机2010-06-19 0
-
[求助]开机后自动关机回到待机状态2010-09-02 0
-
电视机自动关机怎么办2011-03-15 0
-
如何设置电脑自动关机2012-07-16 0
-
怎样实现自动关机2013-03-07 0
-
为什么电脑总是自动关机解决方案2013-07-27 0
-
好记星 K3自动开机2016-06-09 0
-
新手第一帖 长虹电视通电自动开机 开机不定时自动关机或突然黑屏 有声音无画面2017-03-09 0
-
如何实现安卓手机接通电源自动开机2021-12-29 0
-
康佳T2105自动关机奇特故障检修一例2006-04-17 1454
-
机外型彩电交流全自动关机电路图2009-07-29 1075
-
手机自动关机如何解决?2009-12-19 5159
-
电脑关机后又自动开机,怎么办?(详解)2010-02-25 210363
-
安卓手机通电自动开机,自动执行脚本,断电关机,连接电源手机自动开机,断电关机2022-01-07 1614
-
维修罗德与施瓦茨示波器RTB2004自动关机案例2023-11-20 370
全部0条评论

快来发表一下你的评论吧 !
