

聊聊C2机器人的校零
描述
最近在校正C2机器人时遇到了一个小事故,机器人的EMT坏了,反复校正零点报校正超时.
今天我们就聊聊C2机器人的校零.
为什么要校零?
1.当机器人校正的时候,各个轴就可以运动到一个特定的机械位置,也就时所谓的机械零点。
2.一旦机器人运动到机械零点,各个轴上的绝对编码盘的值就被保存下来了。
机器人零位校正后,可以用直角坐标系移动机器人或运行程序; 同时机器人也知道软限位的位置.
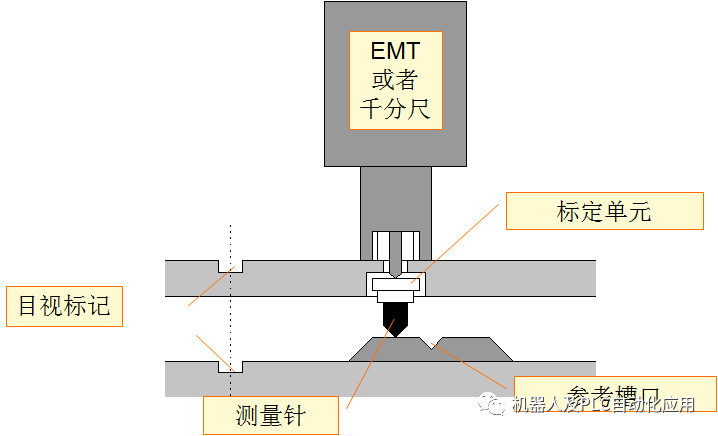
校零装置:
1.EMT
2.千分表
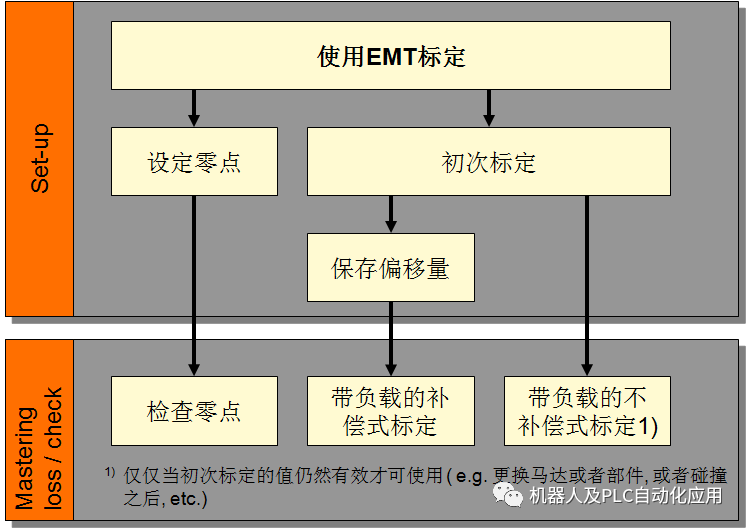
控制运行过程示意:
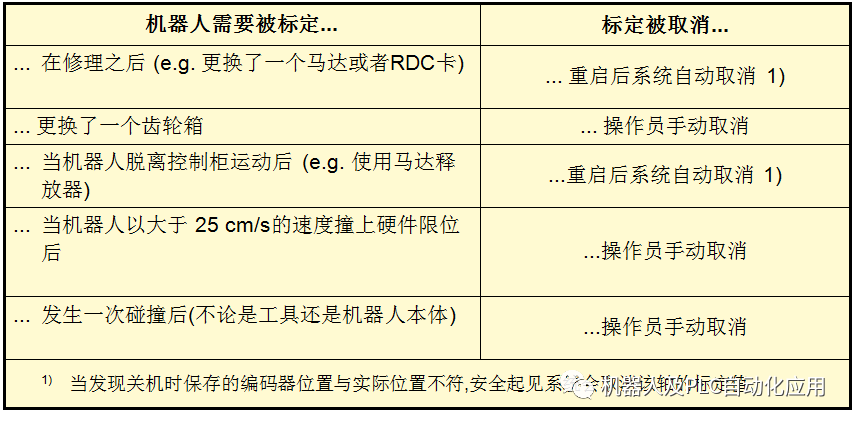
重新标定的情况:

使用EMT标定:
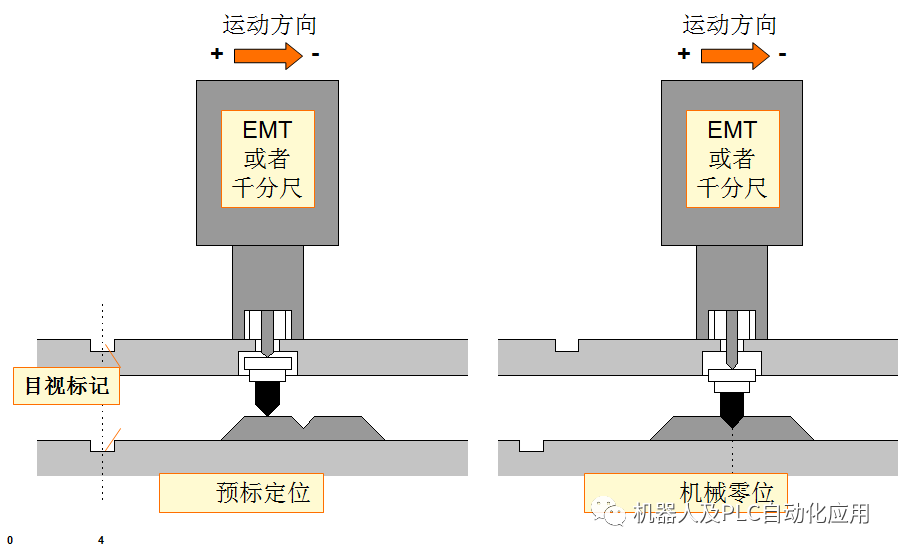
•把需要标定的轴移动到预标定位 (如图所示白线位置)
•使用轴坐标系移动机器人各轴
•每个轴的标定是独立的

•从1轴开始往上标定
•每个轴总是从正向往负向运动
•仅仅在T1模式下!

•摘掉标定单元的保护盖
•接上EMT 并连上信号线(另一端连接到 机器人底座上的连接盒接口 X32上)

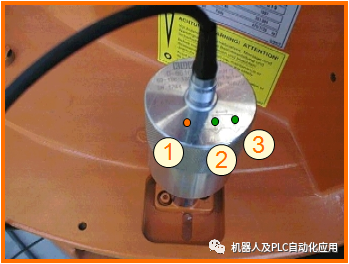
•EMT上有三个指示灯:
1. 红色 - 错误
2.绿色 - 下降沿
3. 绿色 - 上升沿
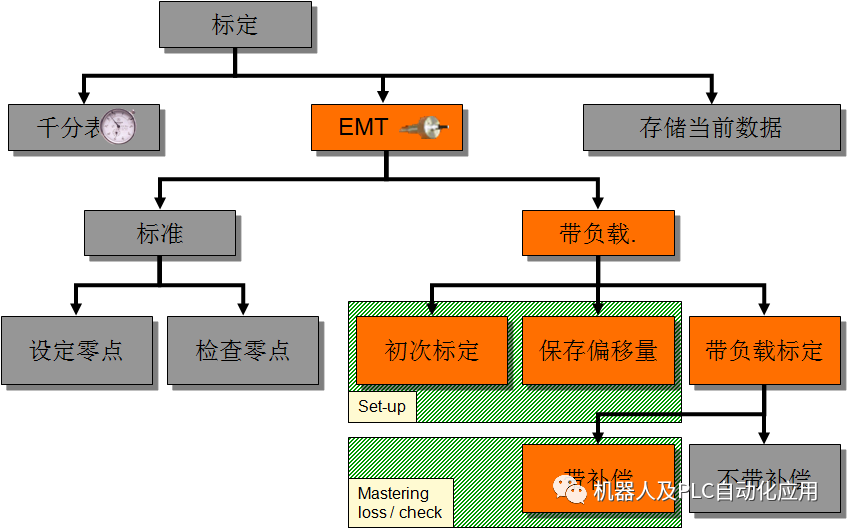
标定菜单:
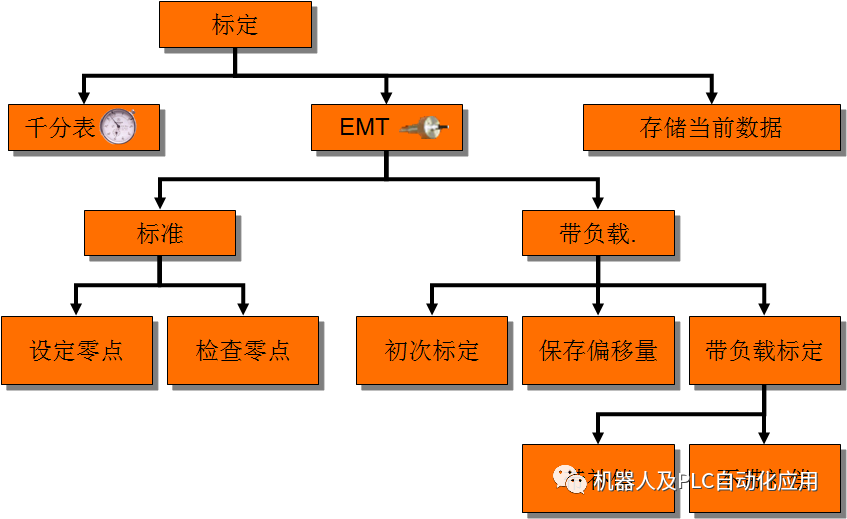
对于精确定位机器人的标定:
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
《机器人设计与实现》——低成本DIY机器人,一本机器人制作的经典入门书2017-08-01 0
-
创意机器人的教程2012-10-11 0
-
酷卡机器人提示要求调零的目的是什么?2015-01-14 0
-
工业机器人的基本结构2015-01-19 0
-
智能家用机器人到底是个啥?2015-06-17 0
-
华南机器人应用培训中心工业机器人培训班招生2015-09-02 0
-
中国的机器人发展光明前景2015-12-29 0
-
C语言教学机器人2016-03-28 0
-
Landzo C1 机器人套件免费试用2016-05-08 0
-
机器人的主要技术参数2017-08-15 0
-
零基础玩转工业机器人2018-10-29 0
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 0
-
机器人是什么?2022-03-31 0
-
通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现2023-02-24 0
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 0
全部0条评论

快来发表一下你的评论吧 !
