

伺服电机定位原理
工业控制
1104人已加入
描述
伺服电机定位原理很简单,电机旋转带动丝杆转换把旋转量转换成平移量,脉冲的数量就是移动的距离,我们只要知道脉冲情况就能计算出位置信息。电子齿轮比提供了简单易用的行程比例变更,如现在一套伺服系统台达ASDA-B系列的驱动器,编码器分辨率为160000p/r,机械设备的丝杆导程为10mm,减速机减速比为15,现要求每个脉冲的移动量为1丝,计算电子齿轮比的分母与分子N/M。我们的思路很简单,不要套公式,进行一个简单地对比就可以计算出,如下表中的转换:
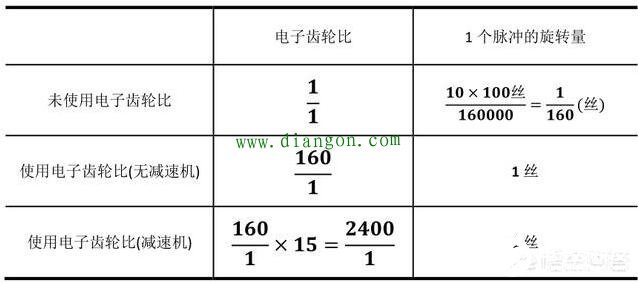
首先考虑不使用电子齿轮比的情况单位脉冲的移动量只有1/160丝,达不到我们的要求因此需要扩大倍数(它的倒数)来满足,这是在没有减速机的情况下,如果有减速机它的脉冲量又会缩小,因为需要继续扩大倍数(减速比),这样在得出了电子齿轮比的分子2400,分母为1。在台达驱动器的参数组P1-44电子齿轮比分子设置2400,P1-45分母设置为1即可。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
请教伺服电机绝对定位和相对定位问题2024-02-05 1261
-
西门子伺服电机定位出现偏差的原因有哪些?2024-01-09 0
-
两个伺服电机定位控制 #自动化技术 #PLC #零基础#零基础教学学习硬声知识 2022-09-16
-
三菱伺服电机的定位启动及busy等信号的时序图相关资料分享2021-06-28 0
-
基于伺服的定位装置设计2017-09-22 506
-
线性伺服电机定位系统简化安全摄像机定位设计2019-02-26 3543
-
究竟是什么原因导致了伺服电机的走位不准2021-01-12 23291
-
伺服电机定位校准方法教程2023-06-28 496
-
高精度FPC伺服冲床设备流程2023-08-24 436
-
伺服位置误差大的原因 怎么解决伺服电机定位误差过大的问题?2023-12-25 2743
-
伺服电机绝对定位和相对定位问题2024-03-18 428
全部0条评论

快来发表一下你的评论吧 !
