

通过采用低成本DSP控制器实现马达驱动的多种功能设计
处理器/DSP
描述
随着数字信号处理器(DSP)价格从几百美元降到3美元,DSP在价格敏感的家电(如洗衣机、冰箱、加热器、通风和空调机)中正越来越多地被采用。带特殊外设的高MIPs DSP,除显著地改进这些产品性能外,还大大地简化产品设计过程并提供各种重要的特异性能。DSP非凡的处理能力,使得制造商能满足用户不断增加的要求,如较高的效率和可变速度工作及精确的速度控制特性。

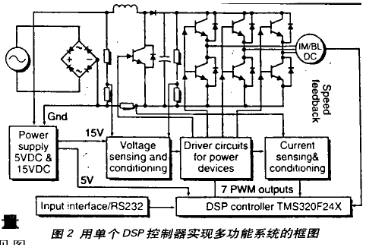
低成本DSP控制器能使很多先进的马达控制算法内置在对成本非常敏感的应用中。DSP控制器的带宽也使设计人员能用一个控制器整合多种功能,如把马达控制、功率因数校正和通信协议整合在一起(见图2)。本文描述采用低成本DSP控制器的单板AC感应马达驱动(带功率因数校正和串行通信)结构,详细地验证DSP软件和硬件方案的优点。
关键的马达驱动要求
为了能提供先进的马达驱动特性,一个典型的马达控制器必须满足下列要求:
·具有产生多个高频、高分辨率PWM波形的能力。
·能实时处理数据以实现先进的算法,使得转矩波动最小,在线参数适应、精确速度控制等。
·用同一控制器实现诸如马达控制,功率因数控制及通信等多种性能。
·用减少元件数、简化板布局和改进制造工艺来简化整个方案。
·通过软件而不是硬件重新设计来简化后期修正。
用于马达驱动的DSP控制器
TI的新型DSP集成了所有重要功率电子设备的外设,以使成本最敏感应用(如家电)的整个系统执行得以简化、减少元件数和降低板尺寸。
用TI公司的TMS320F240 DSP控制器(图1)提供3相ac感应马达驱动的多种功能,这包括具有闭环速率控制的基本马达控制、采用升压拓扑结构的输入功率因数校正和串行通信。此器件具有一个20MIPs 16位定点DSP芯核并集成有下列功率电子设备的外设:12个PWM通道(9个独立的通道)、3个16位多模通用定时器,16通道10位ADC(具有同时变换能力)、4个捕获引脚、编码器接口能力、SCI、SPI、看门狗等。
6个PWM通道(PWM1~PWM6)控制3相电压源倒相器。这6个PWM通道分为3对(PWM1 &2,PWM3&4,PWM5&6)。3个比较寄存器与每个PWM通道对相关联。更新比较寄存器的值以得到合适的PWM输出。可编程的片上软件静带模块提供足够的空载时间以避免失效引起的冲击。有3个以上PWM通道留做实现其他的功能,如功率因数校正。
马达驱动描述
3相倒相器利用6个PWM通道。用可编程片上软件产生静带;25齿链轮提供到控制器捕获单元的速度输入;用升压拓扑结构实现功率因数校正,在升压拓扑结构中,控制器的另一PWM通道控制功率开关。用简单的分压器电路调节和馈送不同的电压到控制器的模/数单元。
完整的驱动主要利用了软件模块:马达控制的闭环间隔向量脉宽调制(SVPWM);改善输入功率因数的功率因数校正模块;串行通信。
下面将详细描述以上所提到的软件模块的实现。
间隔向量脉宽调制(SVPWM)
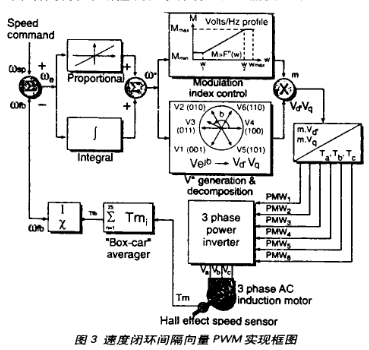
为了给马达提供能量效率,重要的是采用正确的倒相器开关转换方法(见图3)。间隔向量脉宽调制就是这样的一种开关转换方法,它比简单和低效率的方法(如正弦PWM)优越的多。SVPWM具有较高的DC总线利用和较低的谐波铜线损耗。对于给定的dc环路电压输出,SVPWM与正弦PWM馈送马达相比,其3相马达的功率输出提高了16%。
所有应用软件由中断服务程序(ISR)驱动。主码(即本地环)由TMS320C240外设初始化(例如锁相环、看门狗、中断控制和事件管理)组成。码的其余部分由PWM-ISR组成。每50ms(20KHz)由事件管理的Timer1中的周期事件特征位调用ISR。
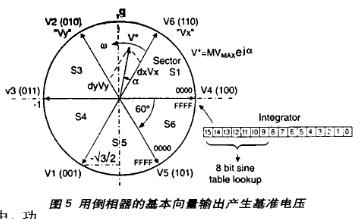
在d-q图(见图5)中需要精确定位基准电压向量。其目标是以给定的速度ω和大小M在d-q图中旋转基准向量。控制器从用户侧接收所需的基准速度ω。角速度ω由精确的频率产生算法控制,此算法依赖于限定长度寄存器(在图5中称之为积分器)的模数特性。积分器的高8位用做256字正弦查找表的指针。到该寄存器的外加固定值(步长)导致8位指针以恒定速率循环查找正弦表。在结束限制时,指针简单地循环并且对步长给出的下一个模值继续同样的运行。需要用Sine(a)数值把基准电压向量分解为基准电压向量所在区域的基本间隔向量。由于在6个区域中这种分解是相同的,所以只需要一个60°正弦查找表。为了完成一个循环(360°),正弦表需循环查找6次。对于给定的步长,V*的角频率(周/秒)由下式给出:
ω=(STEP×fs)/6×2m (1)
(1)式中fs是取样频率(20KHz,PWM频率),STEP是角步长增量,m是积分寄存器的位数。
对给定的PWM频率(fs=20KHz),STEP(=1)和m(16位),其频率分辨率为0.061Hz。因此,倒相器输出频率可控制在0.1Hz之内。查找表的大小对合成正弦波的谐波失真也有一定的影响。一个256条目表用于60°范围,其提供的角查找分辨率是60°/256=0.230。
基准电压向量变换为一组专用开关变量a、b、c
3相电压源倒相器可产生8个基本向量。图5中示出8个基本向量的6个(V1,V2,V3,V4,V5和V6)。其他两个向量V0和V7(零向量)在图中未示出,它们对应于开关变量的状态0(000)和7(111)。为了产生一个任意的基准向量V*,需要对给定的基本向量进行时间平均。在给定区域中所希望的基准电压向量V*可合成为两个相邻基本向量Vx和Vy的线性组合,它们与两个零向量的任一个组合成帧区域。因此,基准向量可写为:
V*=dxVx+dYVY+dzVz (2)
式中Vz是零向量,dx、dy和dz是PWM开关间隔内状态X、Y和Z的占空率。占空率相加必须是PWM周期的100%,即dx+dy+dz=1。
V*=Mvmaxeja=dxVx+dYVY+dzVz (3)
式中M为调制系数。
分解V*为其d-q分量,它可写为:
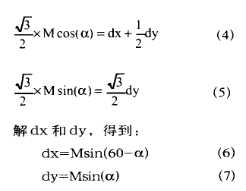
由于d-q基准帧可对照任何基本向量,所以这些方程可应用在任何区域。这就是为什么在这种方法中只需要一个60°正弦查找表的原因。
对于一个特定的基准电压V*,计算所需的PWM占空率dx、dy和dz之后,需要计算比较寄存器的合适的比较值。每个PWM周期(50ms)需要计算3个新的比较值(Ta,Tb和Tc)来产生开关图形。
比较值Ta,Tb和Tc可写为:
Ta=(T-dx-dy)/2 (8)
Tb=dx+Ta (9)
Tc=T-Ta (10)
计算的比较值输入PWM比较寄存器,而DSP控制器在下一个PWM周期开始时更新占空率。
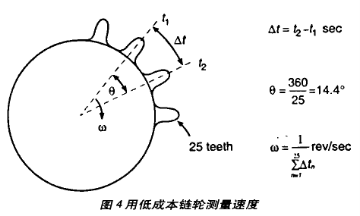
用低成本的25齿链轮和霍尔传感器获得马达速度信息。图4示出与链轮有关的物理描述以及相关的角速率。总脉冲率是25个脉冲/循环。霍尔传感器的输出直接送到C240的Capture1输入,在此可测量齿到齿周期(t2-t1)。为了降低抖动或周期波动,每检测一个新脉冲,对最近的25个周期测量执行平均。
一旦从一个平均算法求出一个“robust”(“健全的”)周期测量,则用倒相周期值计算角速率(频率)。一个经典的比例-积分(PI)可得到闭环速度控制。
功率因数校正
在很多行业中,功率因数校正日益重要起来。欧洲的IEC和美国的IEEE已从事开发离线设备中限制谐波电流的标准。
对很多新电子产品必须具有接近1的功率因数和无失真电流输入波形。通常的AC-DC变换器采用简单电容器的二极管桥整流器从ac线路汲取功率。在离线设备中的输入电流波形用一个整流器/电容器输入滤波器提供窄脉冲。因此,由于电流波形的高谐波失真,使得功率因数很不理想。
用著名的带单电源开关的升压拓扑结构能改善输入功率因数。电源开关控制能量流。当开关接通时,电流建立在升压电感器中,同时二极管保持关断。当电源开关断开时,存在电感器中的能量经二极管对dc线路电容器进行充电。另外可控制电感器电流跟踪所想要的电压。对于功率因数校正,通常控制电感器电流跟踪整流电压,因此ac端电流将与ac线电压同相。然而,基于正向馈电控制和电流测量的方法不是一种简单的实现方法。测量整流器输出电压以得到输入线电流的波形信息。全波整流线电压馈送到模拟通道。输入电压用电阻分压器调整。
另外测量dc线电容器电压可获得输入电流大小的信息。同样,用电阻分压器把此电压馈送到另一个模拟通道。
这两个电压确定升压控制开关的工作占空率。占空率可写为:
dactual=Krec×Vin×dmax
式中dactual是升压电源开关的占空率,dmax是最大允许的占空率,krec是整流器输出电压传感器的增益。
DC总线电压电平确定最大允许占空率dmax。
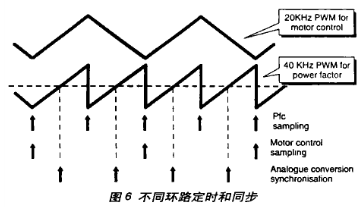
经典的PI方法可得到dmax。Vref取决于不同的应用并且总是大于输入线电压的峰值。模/数变换同步于相应功率因数校正的PWM通道。图6示出不同控制环路的定时图。
升压变换器的大小远远小于各种无源滤波器。可以预料,有效的功率因数校正将满足将来各种严格的电源性能调整。
实验
250W实验板已被制作用来实现上面所提到的所有功能。带风扇的3相感应马达(1/3HP,4极)做为负载被连接到板上。输入是标准的ac线电压(115V,60Hz)。工作频率在0~60Hz之间变化。3相倒相器和升压变换器的功率开关用IRF840功率MOSFET。升压电感器在150mH左右。软件用汇编语言编写,使用小于4KW的程序空间。控制器的片上闪存可存储程序。
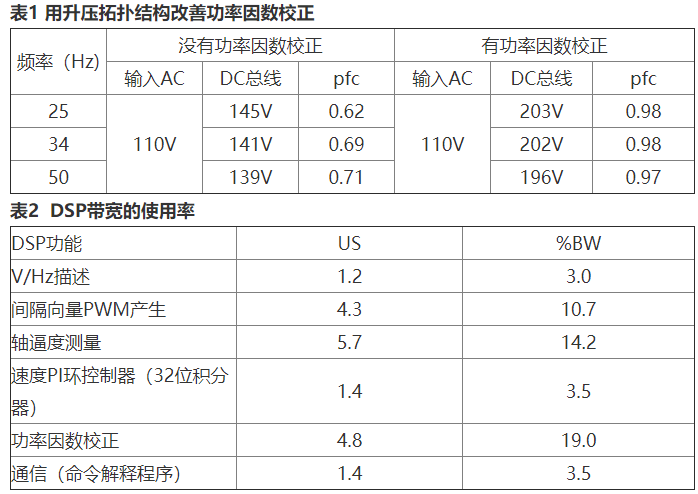
由20KHz SVPWM产生无失真相位电流。表1示出在不同工作频率下的功率因数电平。
检测电流波形的某种失真。升压电感器在较高的工作频率会处于饱和状态而导致电流失真。然而,马达相位电流和线到线电压完全是无失真的。
软启动特性也包含在软件中。在启动期间驱动以预先确定的速率斜波上升。通过斜波上升或下降曲线,进行速度指令的突然改变。
表2列出对于不同软件模块的DSP带宽的使用率。很显然,多功能整合不能利用DSP带宽的100%,因此,更先进的算法可实现应用要求。
结语
新型低成本DSP控制器正在成为成本敏感应用的一种有前途的选择方案。这些控制器具有足够的带宽并集成有片上功率电子设备的外设以实现马达驱动的多种功能。集成的多功能减少了系统元件数并加快了产品上市。
责任编辑:gt
-
对马达控制的误解及其实际情况--DSP对MCU的影响2009-09-25 0
-
基于DSP的马达控制系统2012-11-28 0
-
低成本低功耗8位微控制器可轻松融入高能效产品设计2018-12-04 0
-
PIC32MZ2048ECH144如何实现一个低成本的无控制器系统2020-04-30 0
-
多功能低成本的电压模式PWM控制器2020-08-25 0
-
低成本CCFL背光控制器MAX8722相关资料下载2021-05-17 0
-
低成本FPGA或CPLD实现节能型家电电机控制设计2021-07-14 0
-
智能马达保护控制器的简述2021-09-13 0
-
如何去实现一种基于STM32频率控制器的功能设计呢2022-01-25 0
-
使用STM32F10xxx实现低成本现实的应用方案2022-12-01 0
-
低成本嵌入式多媒体微控制器的设计与实现2009-08-19 446
-
DSP马达驱动器设计发展装置2011-02-28 576
-
DSP泛用型马达控制驱动器2011-02-28 694
-
采用基于Flash的低成本8位微控制器实现优化电子镇流器的设计2019-09-27 2398
-
SVPWM算法在低成本微控制器中的快速实现2022-10-28 230
全部0条评论

快来发表一下你的评论吧 !
