

无人机航测技术为为工程施工管理提供决策依据
军用/航空电子
描述
传统的道路施工方案优化决策过程中,往往是技术人员带上设计图纸到现场,根据地形特征勘察周边环境,分析现场地形与设计意图之间的关系。李斌等基于DEM 数据并对其插值,通过三角化建立拓扑关系进而得到可视化地形。聂启详利用数字化地形图划分规则方格网,再根据等高线点计算格网点高程,构筑三维地形模型。杜阳阳等应用无人机获取的数据测绘大比例带状地形图并建立地形模型; 赵元应用无人机倾斜摄影绘制城市区域大比例地形图,提高了测图的效率,体现了无人机获取数字地形的高效性。
在道路工程施工 BIM 应用方面,多应用 BIM 模型进行设计工程量计算,或者应用于设计结构物之间的碰撞检查。城市道路工程施工环境复杂,沿线交通设施、周边地物地貌变化频繁,传统作业模式需要携带图纸反复到现场踏勘核对,效率低下,而且无法直观了解设计结构物与周边环境之间是否和谐美观。基于这种情况,提出应用无人机获取航测地形并与 BIM 技术相融合,创建城市道路施工环境模型,以快速获取施工周边区域的地形环境。
1 基本原理与流程
1. 1 基本原理
无人机航测能够快速获取实景三维地形模型, 可直接用来量测坐标、距离、面积、坡度、填挖方量等,方便施工环境实景模型的快速更新,使 BIM 设计模型能够在复杂多变的施工环境中进行实景呈现。将 BIM 创建的道路设计模型与无人机航测获取的实景环境模型进行匹配融合,建立能够真实反映 设计结构与复杂施工环境空间关系的三维模型( 称之为“施工环境模型”) ,该模型具有实时性、可量测、可视化、可追溯性等特点,能够为工程施工管理提供决策依据。
( 1) 应用无人机倾斜摄影测量方法获取施工区域内的地形原始影像资料,对影像资料进行处理,通过空三计算、坐标转换,生成具有项目施工坐标属性的实景三维地形模型。
( 2) 在统一的项目施工坐标系统下,将实景三维地形模型点云格式数据与通过 BIM 技术创建的施工结构物设计模型进行融合处理,创建基于实景三维背景下的施工环境模型。
( 3) 当工况发生变化时,可通过无人机航测补飞更新地形模型; 设计方案产生变更时,可通过 BIM 模块对设计模型进行更新。
( 4) 可利用该模块实现工况的实景漫游、设计模型与地形模型的碰撞检查、空间信息的量测、施工模拟、对工程项目环境条件的研究分析等,为施工方案优化、模拟,临建工程建设规划,工程计量等提供影像和数据信息,为复杂环境下城市道路工程施工方案优化、进度调整提供快速决策的依据。
1. 2 系统组成
建模系统由地形原始数据获取模块、地形原始数据处理模块、参数化 BIM 模型模块、参数化模型融合及应用模块四大部分组成( 如表 1) 。
表 1 施工环境模型建模系统组成
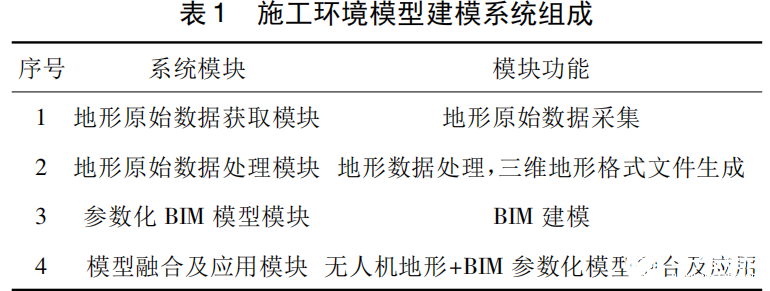
序号 系统模块 模块功能
1 地形原始数据获取模块 地形原始数据采集
2 地形原始数据处理模块 地形数据处理,三维地形格式文件生成
3 参数化 BIM 模型模块 BIM 建模
4 模型融合及应用模块 无人机地形+BIM 参数化模型融合及应用
施工环境模型的工艺流程如图 1 所示。
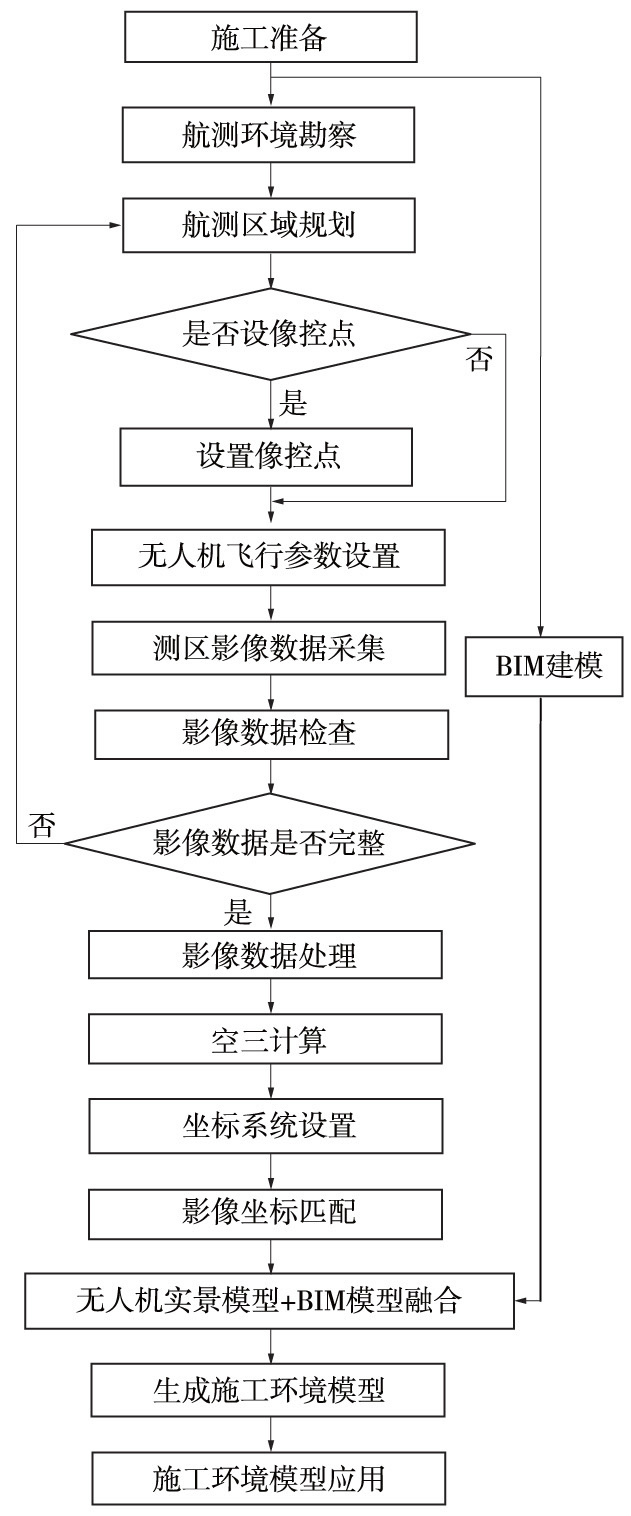
图1 建立施工环境模型工艺流程
2 无人机航测地形模型的获取
2. 1 准备工作
( 1) 收集施工图纸、资料,核实工程施工范围;
( 2) 航测区域报备;
( 3) 无人机飞前测试、检查;
( 4) 坐标测量设备测试、检查;
( 5) 耗材准备。
2. 2 航测环境勘察
( 1) 工程沿线航测环境勘察: 主要勘察测区范围内结构物高度分布情况,确定无人机航高。
( 2) 工程沿线 5 km 外部环境勘察: 目标范围内有无军事禁区、机场起降航线及其它禁飞区。
2. 3 航测区域规划
根据设计图纸、施工范围及其他需求,确定航测区域和飞行方案,并编制飞行计划。
2. 4 像控点设置
根据测量精度要求、无人机性能和测区地形,布设 像控点并测定像控点坐标,作为影像坐标匹配的基准。
( 1) 无免像控型无人机一般每隔 500 m 左右均匀设置像控点,地形起伏变化较大时需加密设置。带GNSS RTK 系统的无人机能够实时获取影像曝光时刻的像片中心坐标,可根据精度需要在地形起伏变化较大的地段加密设置部分像控点。
( 2) 像控点采用彩色喷漆图案( 在地面上或纸板上喷绘一个半径为 0. 5 m 的十字符号) ,确保在拍摄的影像中能够清晰分辨符号中心。用印刷图案的纸板作像控点时,纸板可回收再次利用。
( 3) 像控点应按航线方向编号,坐标可采用 GNSS RTK 测量或全站仪导线测量。
2. 5 航测区域及飞行参数设置
按照无人机飞行方案设置各项参数,当外业实施过程中遇到特殊情况时( 如电池电量不足或天气原因影响) ,可根据现场实际情况适当调整飞行参数。
( 1) 在地形原始数据获取系统中设置航测区域, 并按照系统提示的步骤,设置规划航测区域内无人机 的飞行线路,同时设置相关飞行参数,以及相机拍摄角 度、拍摄间隔、航向重叠度、旁向重叠度、无人机飞行速 度等。飞行高度依据现场勘察的情况确定,应保证无 人机飞行高度高于飞行区域内最高结构物 5 m 以上。
( 2) 将每一条飞行路线进行编号并保存在系统数据库内,以便影像数据质量差或者影像遗失时可按原线路进行补拍。
( 3) 在飞行控制系统与无人机连接的状态下,将飞行线路数据上传至无人机运行数据库内,并确保传输过程连续进行。
2. 6 无人机试飞
参数设置完毕后,应对无人机进行试飞,检查飞行过程中相机拍摄情况、飞行路径执行情况、影像数据存储情况及像控点在图像数据上的清晰度等。
2. 7 实景地形影像资料获取
( 1) 根据无人机试飞情况确定各项参数,开展全线影像数据的获取工作; 每块航测区域的影像数据单独导出存储并编号。
( 2) 对全线航拍原始数据进行初步检查,确保数据的完整性,再导入数据处理软件生成虚拟三维地形; 若存在影像缺失区块,应根据实际缺失范围进行补拍, 直至影像数据 100% 完整。
2. 8 实景地形影像数据处理
( 1) 按照每条航线的编号,将完整的影像数据依次导入处理软件中,并核对导入的图片数量与原始数据文件夹里的图像数量是否一致。
( 2) 将空间参考系统设置为与控制点对应的工程施工坐标系; 将控制点坐标参数信息导入数据处理软件; 找出可在图像上看到地面标识控制点的图像,并与导入文件数据坐标点号一一对应; 在 3D 视图中找到可以看到控制点的图像; 根据 2D 及 3D 视图,找到匹配的影像,与控制点进行关联融合。
( 3) 参数信息关联完毕后,对数据进行保存。
( 4) 进行首次空中三角测量计算。
( 5 ) 完成全部控制点与影像上标识点的匹配工作。
( 6) 进行第二次空中三角测量计算。
( 7) 检查投影误差的均方根精度( 所有数值应小于 0. 6) ,如果精度不满足要求,应重新进行影像与坐标控制点的匹配工作。
2. 9 实景三维地形生产
( 1) 运行建模软件,新建项目,选择空间参考系统。切块模式设置为规则平面格网。
( 2) 参数选择为三维网格形式,并将格式改变为OpenSceneGraph binary ( OSGB) ; 同时,坐标系设置为工程施工坐标系。
( 3) 生成无人机航测三维地形模型。
3 BIM 参数化模型建立
( 1) 根据工程项目设计图纸,编制 BIM 建模实施方案;
( 2) 根据任务要求,在施工图纸的基础上,建立项目的族库文件,为主体结构的建模做准备;
( 3) 依据工程项目的建模环境,将建模软件系统的坐标系与无人机航测地形坐标系统设置为一致;
( 4) 对项目 CAD 图纸进行简化处理,删除冗余线条,并确定 BIM 项目的建模基点;
( 5) 基于项目基点,将 CAD 图形导入 BIM 建模软件中,作为参数化模型建立的基础;
( 6) 通过前期建立的族库文件以及手工建模,完成 BIM 模型的创建。
4 无人机地形数据+BIM 模型匹配融合
4. 1 基于第三方软件地形数据软件的模型融合
将 BIM 模型保存为 FBX 格式文件( FBX 格式文件可保留模型的参数化信息) 。将 FBX 格式文件转化为带参数化信息的 3DS 格式文件,再将 BIM 模型导入到已打开处理完毕模型的地形数据软件中。导入过程中需进行坐标转化参数设置,以保证 BIM 模型和地形模型的精确结合。
4. 2 基于 BIM 软件的模型融合
将无人机地形转化为 PCD 点云格式文件,再导入到含有 BIM 模型的 BIM 软件环境中; 导入过程中需进行坐标转化参数设置,保证 BIM 模型和地形模型的精确结合。
4. 3 基于三维效果软件的模型融合
选择 OBJ 格式文件为最终地形模型文件,同时将BIM 模型转化为 FBX 格式文件,通过 3D Max 软件的文件导入功能,将无人机地形与 BIM 模型融合。导入的过程中需进行坐标转化参数设置,使 BIM 模型与地形模型精确匹配,形成施工环境模型。
4. 4 质量控制措施
( 1) 航拍作业前对像控点坐标、高程进行复核;
( 2) 在影像数据处理过程中,确保像控点坐标参数与像控点图形中心准确对应;
( 3) 影像成像不清晰或因建筑物遮挡影像信息不全时,应进行局部补飞或重飞;
( 4) 对地形特征点坐标、高程进行抽检,通过地形模型获取的坐标与实测坐标比较,检核地形模型的实际精度,点位偏差超出相应比例地形图的精度时,应分析原因,并采取加密像控点的方式对影像数据重新进行处理;
( 5) BIM 模型与地形模型融合前,必须对模型进行核查,确保设计模型与设计图纸一致;
( 6) 地形模型坐标系应与 BIM 设计模型坐标系精确匹配至工程施工坐标系内,使融合后创建的施工环境模型的空间位置与施工坐标系准确一致。
5 工程实例及结论
( 1) 工程概况
杭州市艮山路提升改造暨地下综合管廊项目: 地面道路为城市主干路,双向 6 ~ 8 车道,原有道路改造长度约 1. 52 km,主要工程范围包括地面道路 1. 52km、高架桥约 1. 52 km、地下管廊约 1. 9 km、地面桥梁1 座、人行天桥 1 座、排水及相关附属等工程。道路交改工作量大,房屋、管线密布,施工环境复杂。
( 2) 应用情况
利用无人机建立施工范围内的三维实景地形模型,作为建立施工环境模型的基础( 如图 2) 。
图2 无人机航测三维地形模型
根据工程设计图纸,创建 BIM 参数化模型。人行天桥、地面桥桩基础及墩柱基础 BIM 模型如图 3 所示。
图3 工程结构物BIM模型
将地面桥梁、高架桥、人行天桥等结构物 BIM 模型与无人机航测地形模型进行融合,建立施工环境模型( 如图 4) 。
通过对施工环境模型的分析,使复杂的施工环境得以直观的展现,结构物与现场道路、房屋之间的空间位置关系一目了然。可以在室内从施工环境模型上确认拆迁房屋边界、数量、确定道路交改范围及方案,为临建工程规划、施工场地布置方面及时提供参考依据和规划载体,在施工过程中为施工方案模拟、分析、比选,以及基于模型的面积量测、体积量测、坐标量测提供准确的空间信息数据,其更新航测地形时间仅为传统数字化测图建模的 1 /3。
图4 融合后的施工环境模型
6 结论
( 1) 复杂城市道路工况下,无人机航测法建立施工环境模型具有操作流程简单,可随工程进展及时对实景模型进行快速更新,确保环境模型的现势性等优点。
( 2) 可直接在模型中量测坐标、距离、面积、坡度、填挖方等参数,具有空间信息可量测的特点。
( 3) 施工环境模型使设计模型能够真实地展示在施工实际场景之中,可在室内随时进行设计模型与实际工况之间的碰撞检查,便于提前对碰撞可能产生的影响进行预判分析,及时对施工方案进行调整,具有真实性、可视化、可模拟推演等特点。
( 4) 多期实景模型真实地记录了施工过程信息,可对关键施工过程进行场景再现,呈现整个工程施工过程以及工程竣工时期的实景模型,具有关键工况环境可追溯的特点。
责任编辑:gt
-
无人机全景监测:空域管理的新革命2024-02-20 0
-
第二集 知语云智能科技无人机反制技术与应用--无人机的发展历程2024-03-12 0
-
第三集 知语云智能科技无人机反制技术与应用--无人机的应用领域2024-03-12 0
-
第四集 知语云智能科技无人机反制技术与应用--无人机的组成与工作原理2024-03-12 0
-
建筑工程施工规范全集2008-07-03 0
-
无人机技术专题:让你了解最前端设计2015-04-28 0
-
无人机遥感技术2016-03-11 0
-
都在谈论无人机:教你10种利用无人机赚钱的方法2017-02-17 0
-
天途航测无人机受关注,倾斜摄影技术遥遥领先2017-06-12 0
-
无人机技术解答2017-11-15 0
-
如何用隧道精确定位系统实现工程施工安全管理?2018-10-24 0
-
如何办理环保工程施工一级资质的呢?2020-12-23 0
-
各类反无人机技术的优势2022-08-25 0
-
航测无人机怎么选择2020-05-27 1226
-
无人机航测技术的特点优势和应用对比2020-08-19 4689
全部0条评论

快来发表一下你的评论吧 !
