

基于虚拟仪器技术实现发动机综合性能测试系统的设计
测量仪表
描述
1 引 言
随着发动机电控技术的发展,对发动机测试提出了更高的要求。发动机试验的自动化成为提高发动机测试效率和质量的重要方法。虚拟仪器是用软件将计算机与标准化虚拟仪器硬件结合起来,从而实现传统仪器功能的模块化,以达到自动测试与分析的目的。利用虚拟仪器技术用户可以通过图形化的编程环境和操作界面,轻松完成对待测对象的信号调理、过程控制、数据采集、数据分析、波形显示、数据存储、故障诊断以及网络通信等功能,大大缩短了系统开发周期;同时由于采用了标准化的虚拟仪器软硬件,测试系统的兼容性和扩展性也得到了很大程度的增强;除此以外,虚拟仪器技术的灵活性强和可重用度高,可以使用户的测试系统规模最小化,且易于升级和维护,用户甚至可以使用现有硬件组成另一套测试系统,从而减少不必要的重复投资,降低系统的开发成本。
2 系统组成及工作原理
(1)系统组成
发动机性能虚拟仪器测试系统主要由主控机模块、cFP实时监控模块、测功机模块以及待测发动机模块四部分组成,如图1所示。
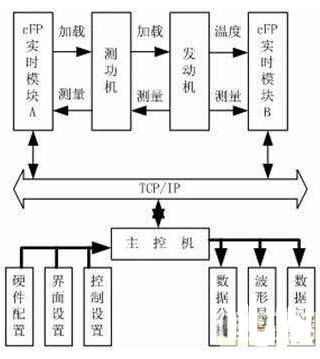
图1 发动机性能虚拟仪器测试系统
主控机模块为一台DELL工作站,用于提供图形化用户界面,完成对系统硬件的配置和对用户界面和控制参数的设置,并实时更新各指标参量对时间的波形显示,经过曲线拟合后得到发动机特性曲线,最后完成测试数据的记录工作。与此同时,主控机还通过嵌入式NI PCI数据采集卡完成对非控制参量,如压力、油耗等的测量工作。
cFP实时监控模块由两部NI cFP分布式I/O系统组成,通过TCP/IP协议与主控机通信,从主控机获得控制参数命令来控制测功机,并返回从测功机模块采集来的数据信号,交由主控机处理。其中模块A用于完成实时自动加载和控制指标参量的测量,并提供过载保护、紧急停车以及非法停机后的系统重建等应急措施;模块B用于完成对待测发动机各温度点的实时监测。
测功机模块被用于为待测发动机提供一定的负载,并由其内部的传感设备将待测发动机在该负载下的扭矩、转速以及输出功率等待测指标参量转换为 cFP实时监控模块A可以接受的电压信号。
(2)工作原理
发动机性能虚拟仪器测试系统可在两种工作模式运行下:自动工作模式和手动工作模式,主要测试项目有:
1)发动机压力曲线 (油、水、气的进出口)。2) 发动机温度曲线 (油、水、气的进出口及环境)。3) 发动机转速曲线。4) 发动机扭矩曲线。5) 发动机功率曲线。6) 发动机油耗曲线 。
自动工作模式下,主控机首先等待用户完成软硬件的设置和配置。然后提请用户选择负载测试或定参数测试,负载测试下用户需要设置负载曲线、负载时间、循环时间以及测试时间等测试参数;定参数测试下,用户可以选择指定扭矩、转速或是功率,并设置相应的定标参数、控制参数以及测试时间。完成以上步骤以后,就可以启动测试程序,测试系统即按照用户制定的负载自动加载同时完成对待测发动机的性能测试;或是通过一定的控制算法保持定标参数的稳定并对该状态下的待测发动机进行自动测试。系统运行的同时,用户可以在实时监测图表中观察各指标参量对时间的波形显示,经过曲线拟合后得到发动机特性曲线,并可将感兴趣的图表导出存盘。当完成测试时间后,系统自动终止测试。
手动工作模式下,系统工作原理与自动工作模式下基本类似,只是系统不进行循环测试,而是提供一种交互式的测试环境,完成指定的测试项目后,等待用户的进一步操作。
3 硬件结构
发动机性能虚拟仪器测试系统硬件组成框图,如图2所示。
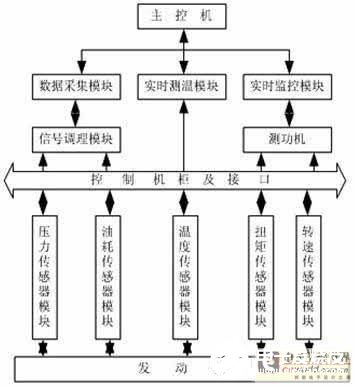
图2 发动机性能虚拟仪器测试系统硬件组成框图
(1)主控机
主控机选用一台DELL工作站,内嵌了Intel Pentium 4 2.6G CPU,多功能数据采集卡和实时测温模块和实时监控模块。
(2)实时监控模块
实时监控模块选用NI cFP分布式I/O实时系统。作为工业级控制系统,cFP具备FIFO数据队列、断电数据缓存、看门狗状态监测以及高抗冲击性和抗干扰性,是用于完成系统最核心的实时采集与控制的部分。
(3)实时测温模块
实时测温模块选用NI cFP分布式I/O实时系统。采用了cFP-2020控制器,配以4块cFP TC-120 8通道热电偶模块,可直接用于测量标准J、K、T、N、R、S、E和B型热电偶,并提供相应的信号调理、双绝缘隔离、输入噪声过滤、冷端补偿以及各种热电偶的温度算法,用于发动机各待测温度点的数据采样,并利用分布式I/O的基于TCP/IP协议的网络共享功能实现数据的远程共享,有利于对工业现场实施远程的实时监控。[page]
(4)测功机
测功机是根据作用力与反作用力平衡原理设计的。当发动机测功机的定子受到的转矩与被测发动机的转矩相等时,由单片机数据采集系统直接精准地读出被测发动机的转矩值。当被测发动机旋转带着测功机的转子旋转时,若给测功机加入直流励磁电压,测功机中有磁场存在,此时测功机转子旋转且切割磁力线产生电枢电流,电枢电流和磁通相互作用产生制动转矩,同时测功机定子受到一个相反方向的转矩作用,便在测功机传感器轴上产生压应力,在正常工作范围内,压应力与传感器轴所承受的转矩成正比。如果在传感器轴产生最大压应力方向上粘贴电阻应变片,则应变处的电阻值就随着压应力的大小而变化,再将应变片接入一定的桥式电路就能将压应力的变化转化为电压信号,从而即能测量出转矩的大小。
发动机转速的测量使用光电式转速传感器,测速分辨力高、惯性小、应用广泛,利用单片机和光电式传感器相配合,使待测量发动机转速简便、抗干扰能力强。光电式传感器在发动机轴上装一个边缘有N个均匀分布锯齿的圆盘,通过光线投射到光敏管上,当发动机转动一周,就得到N个脉冲信号,测量脉冲信号的频率或周期,就可得到发动机的转速。
(5)控制机柜
控制机柜主要由控制开关、开关电源、滤波器以及连接线路组成,是为各路传感模块提供相应的多路接口,使之与待测发动机连接,并提供安全的系统供电、信号隔离、幅度调节以及风冷控制等辅助功能,为整个发动机测试系统提供强电支持及系统应急措施。
4 软件结构及算法
(1)软件结构
发动机性能虚拟仪器测试系统总体采用一种基于TCP/IP协议的客户机/服务器(CS)结构。服务器架构为NI cFP分布式I/O体系,利用其内嵌的独立式实时系统实现目标参量的信号采样,并完成对目标参量的实时监测和控制;客户机则采用通用的PC机结构,运行 Windows 多线程操作系统,使用LabVIEW虚拟仪器平台,借助TCP/IP协议实现,与服务器之间控制参量及检测数据的通信,并提供GUI图形化用户界面,实现人机交互,完成控制参数的输入,以及检测数据的分析、运算和图表显示。
系统操作流程为,上电后服务器自动启动存储器中内建的LabVIEW RT实时程序,并实时侦听客户机“开始测试”的命令;客户机开机运行发动机性能虚拟仪器测试主程序,完成用户登录、硬件配置、选择测试项目、设置测试参数后,启动测试程序;服务器侦听到客户端“开始测试”命令后,按照客户制定的硬件配置、测试项目以及测试参数开始实时控制与数据采集,并通过TCP/IP协议将实验数据发送给客户机;客户机发出PID控制命令,并对服务器发送的实验数据进行分析处理,完成PID控制后,按照测试项目进行测试,分析处理测试数据,并以图表方式显示实验结果;完成测试后,客户机发出结束测试的命令,经服务器接收确认后,结束测试。
(2)PID控制算法
本系统试验了3种PID控制算法:位置式PID控制算法、增量式PID控制算法和积分分离PID控制算法。
1) 位置式PID控制算法

该算法的优点是原理简单,只是将经典的PID算法理论离散化,运用于计算机辅助测量,结构简单易于实现;缺点是每次输出均与过去的状态有关,计算时要对e(k)进行累加,计算机运算工作量大;而且,因为计算机输出的u(k)对应的是执行机构的实际位置,如计算机出现故障,u(k)的大幅度变化会引起执行机构位置的大幅度变化。
2) 增量式PID控制算法

该算法的优点是,由于计算机输出增量,误动作时影响小,必要时可以用逻辑判断的方法去掉;手动/自动切换时冲击小,便于实现无扰动切换,此外当计算机发生故障时,由于输出通道或执行装置具有信号的锁存作用,故仍能保持原值;算式中不需要累加。控制增量Δu(k)的确定,仅与最近k次的采样值有关,所以较容易通过加权处理而获得比较好的控制效果。增量式控制也有不足之处:积分截断效应大,有静态误差;溢出的影响大。
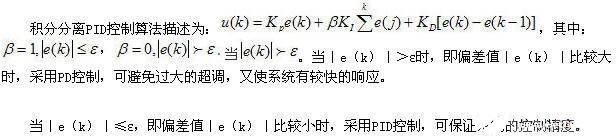
3)积分分离PID控制算法
5 结 论
该发动机性能虚拟仪器测试系统,实现了对发动机的多路压力、扭矩、转速、功率以及温度实时监测,并利用TCP/IP协议实现主控机对多路信号的远程操控以及测试数据的网络共享;该系统具有测量精度高、运行稳定性强,适用于多种类型发动机综合性能测试。
责任编辑:gt
-
虚拟仪器和传统仪器的比较2009-07-09 0
-
虚拟仪器能否实现网络测试?2009-09-06 0
-
基于LabVIEW的发动机轴功率测量虚拟仪器系统开发2012-08-31 0
-
有谁可以共享一份基于虚拟仪器技术在汽车发动机台架试验中的应用的vi文件2015-06-24 0
-
采用LabVIEW的发动机油耗测试系统设计方案2019-04-03 0
-
请问怎么设计一种发动机性能虚拟仪器测试系统?2021-04-15 0
-
发动机冷试验的测试原理是什么?2021-05-14 0
-
虚拟仪器技术在发动机测试中的应用研究2009-06-15 310
-
基于虚拟仪器技术的发动机测2009-06-28 379
-
某型涡扇发动机半实物仿真系统设计2009-09-03 425
-
基于虚拟仪器技术的柴油发动机测控系统2010-07-02 431
-
基于虚拟仪器技术的汽油发动机ECU仿真测试系统2010-07-13 619
-
电动机性能虚拟仪器测试系统设计与实现2010-08-31 761
-
基于虚拟仪器的发动机台架试验通用测控系统2010-10-11 401
-
如何使用虚拟仪器技术和PXI实现发动机ECU硬件的在环仿真系统2020-11-26 708
全部0条评论

快来发表一下你的评论吧 !
