

KUKAC 4机器人柜内模块KPP或KSP分配安全地址
描述
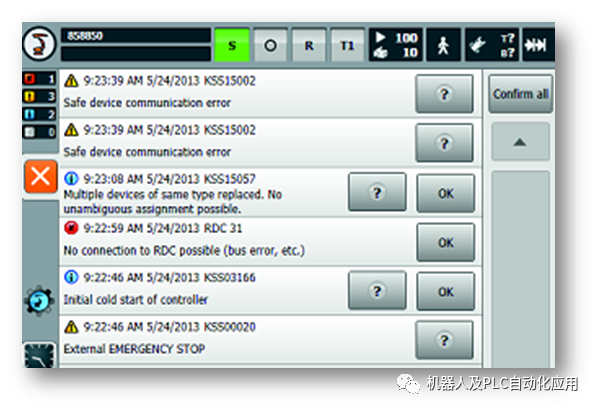
如果在一个 KRC4 上拆下了两个 KSP 模块,并且在其他模块的相应插接位置处又重新安上,则将出现下列故障信息:
1.其原因是安全的EtherCatProtokollFSoE。
2.各模块的位置及FSoE地址均已确定。
3.对于EtherCat Master 来说有两种可能出现此情况
•通过调换两个模块 FSoE地址保持不变,但位置已更改。
•两个模块均已保留在正确的插接位置处,但是接线顺序被更改。
4.EtherCat Master 始终需要明确的唯一状态以便实现安全通讯。
5.而这两种情况不满足此条件。
6.KCB 进入安全状态。
确定实际应用的设备的库卡序列号。 对于 KSP 和 KPP,其序列号在铭牌上。

1 一般性序列号
2 库卡专有序列号
查知 KPP和 KSP 模块序列号
通过 KCB-库卡控制器总线赋值 FSoE更改的地址。
查知 KPP和 KSP 模块序列号
WorkVisual电脑的IP 地址和与其相连 (KSI 或 KLI) 的接口的 IP地址位于同一个子网中。
1. 在项目结构中将所涉及的控制柜设为激活状态。
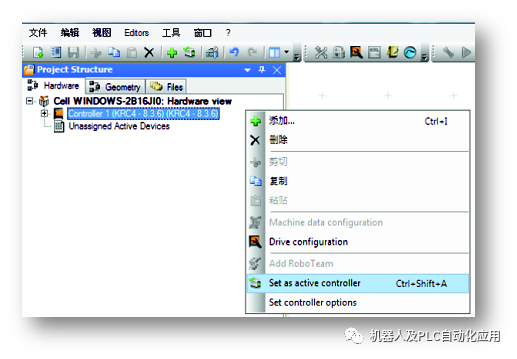
为此标出控制系统,并通过鼠标右键打开快捷方式菜单。点击菜单项“设为激活的控制器”。项目结构将扩展添加控制柜相关的总线结构。
2. 定义控制系统的Windows 接口。
通过哪个端口将 WorkVisual PC 连接到控制系统上 (例如 KLI)
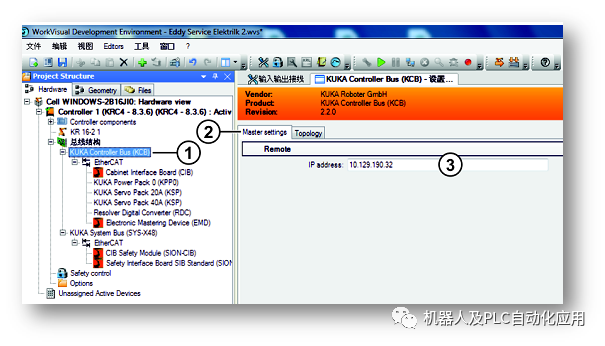
在窗口项目结构的选项卡设备中双击节点库卡控制器总线 (KCB)(1)。
窗口 KUKA控制器总线 (KCB)-设置 … 将打开。
切换到选项卡主站设置(2)中。
输入 机器人控制系统的 IP 地址(Windows 接口的 VLAN)(3)。
点击OK键,以应用说明并关闭窗口。
3. KCB - KUKA 控制器总线与 WorkVisual连接。
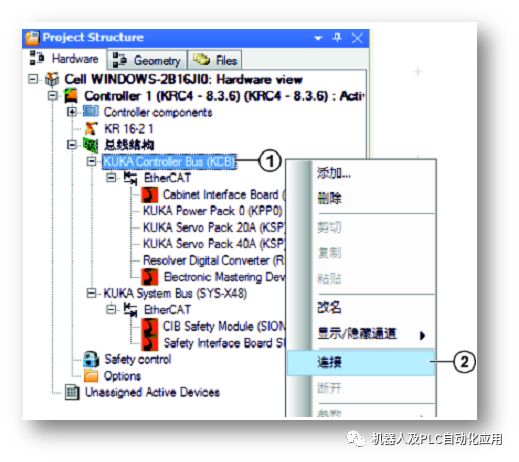
用右键点击节点库卡控制器总线 (KCB)(1)并在快捷菜单中选择连接(2)。这个节点现在以绿色斜体标示。
4. 在节点库卡控制器总线 (KCB) 下方用右键点击相关设备 (1)并在弹出菜单中选择连接(2)。

这个设备名称现在以绿色斜体显示。
5. 在 SmartPad的信息窗口中显示下列信息:

6. 再次右键点击该设备(1)并在弹出菜单中选择 功能(2)>FSoE-Slave-Adressevergeben... ( 3 )。

7. 窗口FSoE-Slave_ 地址分配 将打开。
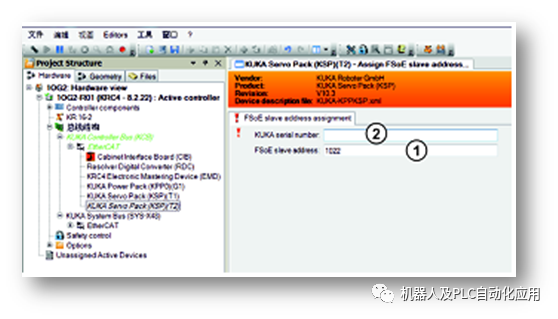
8. 在栏位中输入更改的FSoE- Slave 地址 (1)。
模块相关的序列号必须在下一步中填写 (2)。
如果该号码与物理序列号不符,则栏位左侧将出现红色的叹号。
这在输入过程中也如此,只要尚未完全填写完毕或号码错误就会有此显示。
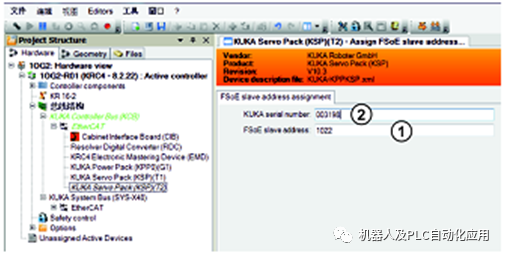
只要已完整正确输入此号码,红色感叹号即刻消失。
如果序列号正确,则点击应用。
用 OK关闭窗口。
9. 再次右键点击该设备(1)并在弹出菜单中选择 断开( 2 )。
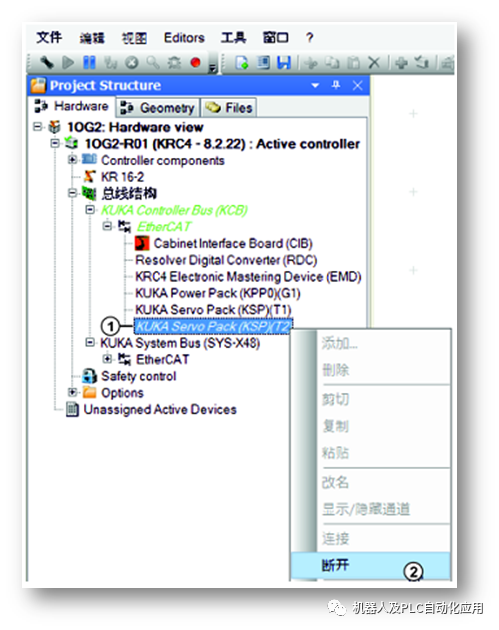
数据此时保存在实际设备上。
但实际控制器总线尚未有访问设备的权限。
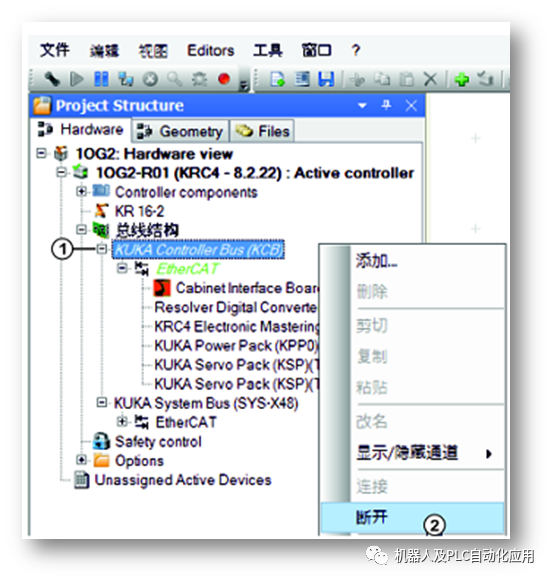
10. 用右键点击节点库卡控制器总线 (KCB)(1)并在快捷菜单中选择断开(2)。
FSoE地址
|
KSP 左边 地址:1022 |
KSP 中间 地址:1021 |
KPP 右边 地址:1020 |
其他组件
可以为下列组件分配 FSoE 地址。但是实际上这没有必要,因为它们在每个机器人控制系统中只存在一次。
| smartPAD | 13330 |
| SIB | 13331 |
| 扩展型 SIB | 13332 |
| CIB | 1 |
绝对不允许将 smartPAD、SIB、SIB extended 和 CIB 的地址分配给其他的组件。
-
机器人与未来2015-12-29 0
-
智能家居安全机器人2017-03-14 0
-
如何保障桁架机器人的安全2018-09-29 0
-
机器人、协作机器人和移动机器人,你分的清楚吗2018-10-30 0
-
工业机器人的技术原理2018-11-23 0
-
安全机器人的模块化系统:不同的应用需要合适的传感器技术解决方案2020-05-07 0
-
智能机器人视觉传感器的技术和应用解析2020-08-14 0
-
智能机器人的视觉传感器技术和应用2020-08-17 0
-
协作型机器人的应用类型2020-12-01 0
-
库卡机器人MGV电源模块维修2021-09-08 0
-
什么是服务机器人2021-09-17 0
-
机器人是什么?2022-03-31 0
-
K-Bot版本4机器人的设计教程2022-08-22 0
-
KUKAC4-PN网络模块如何修复2020-12-23 1680
-
如何分配F-IO模块的PROFIsafe安全地址2022-07-22 1930
全部0条评论

快来发表一下你的评论吧 !
