

KUKA-8.3系统力矩监控学习技术报使用方法分析
描述
G_Koll_Interface()
CMD_SEL,PAR1,PAR2,PAR3,PAR4,PAR5,PAR6,PAR7,PAR8,PAR9
P1 1学习位置/2 力矩监控
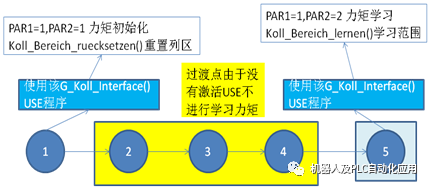
1. 学习前要先新进行初始化 .
2. 机器人在进行学习力矩时,只针对调用USE轨迹点的力矩测量值,这些值只对改轨迹点有效,其他轨迹点不能使用 .
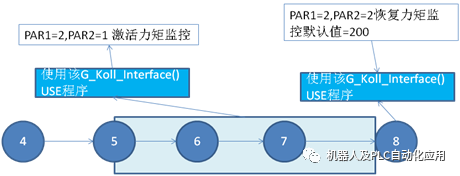
开启力监控后,力矩监控值对之后的轨迹点都有效果, 力矩监控变量$TORQMON会始终影响后面的轨迹点,直到将力矩监控值恢复默认值200.
ASE #USR_ADV
Advance
Modus=PAR2 模式 1初始/2激活
Bereich=PAR3 存储区
CASE #USR_TRIG
Trig
;
Modus=PAR2
Bereich=PAR3
;
SWITCH PAR1
CASE 1
;学习驱动器碰撞扭矩降低
IF($MODE_OP==#EX) AND ($OV_PRO==100)THEN
IF(PAR2==2)THEN;终点
Koll_Bereich_lernen()学习范围
在进行学习力矩时,要注意学习的力矩范围,力矩的测量值只针对使用USE的当前轨迹,因此想使用的机器人轨迹力矩要与当前测量点吻合。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
烙铁使用方法-焊接技术培训资料【PPT】2012-08-18 0
-
频谱分析仪的工作原理和使用方法2014-07-16 0
-
【emWin实战教程V2.0】第8章 emWin5.32模拟器的使用方法2017-01-03 0
-
学习最小系统端口的使用方法2021-11-25 0
-
assessPort工具的使用方法2022-01-12 0
-
基于CANbus和SNMP的起重力矩监控系统2009-09-14 945
-
三轴天线耦合力矩分析及前馈补偿技术2011-01-10 460
-
电机使用方法2016-04-26 1338
-
浅谈光耦的使用方法_章圣焰2017-10-16 1022
-
示波器的使用方法(三):示波器的使用方法详解2020-12-24 2455
-
KUKA机器人PN系统网络故障的判断方法2022-03-11 3222
-
Linux系统中的Makefile的使用方法2022-11-17 3488
-
TTL电路分析、工作原理、使用方法2023-05-18 3861
全部0条评论

快来发表一下你的评论吧 !
