

KUKA电伺服焊钳测量原理分析
描述
user测量程序:
Geometrie:
初始化
在以下情况下必须完成:
•启动时
•每次更换电极后
使用在WorkVisual下的初始化力新上限下配置的力。
nachFraesen:
循环初始化
•循环初始化必须在瓶盖铣削之后进行,使用在WorkVisual中在初始化力盖下配置的力。

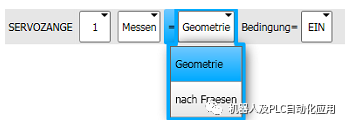
焊钳测量USER程序:
P1 =选择钳子(钳子编号)
P2 =技术选择(测量)
P3 =方法-几何/铣削后
P4 =条件-执行命令的条件
例如:
SERVOZANGE 1 Messen= nach Fraesen Bedingung=EIN 测量
VW_SGB_INIT_ADV(TRUE,#SG_PTP,P8,1,#SAME)
VW_SGB_INIT_MAIN(TRUE,#SG_PTP,P8,1,#SAME)
VW_SGB_INIT_MAIN(Condition:IN, MovementType :IN, PointCoord :IN,GunNumber :IN,InitType :IN)
Condition:TRUE条件
MovementType:SG_PTP运动类型
PointCoord:P8 工作点号
GunNumber:1 枪号
InitType: #SAME/#NEW 测量类型:#SAME铣削后测量,#NEW更换电极测量
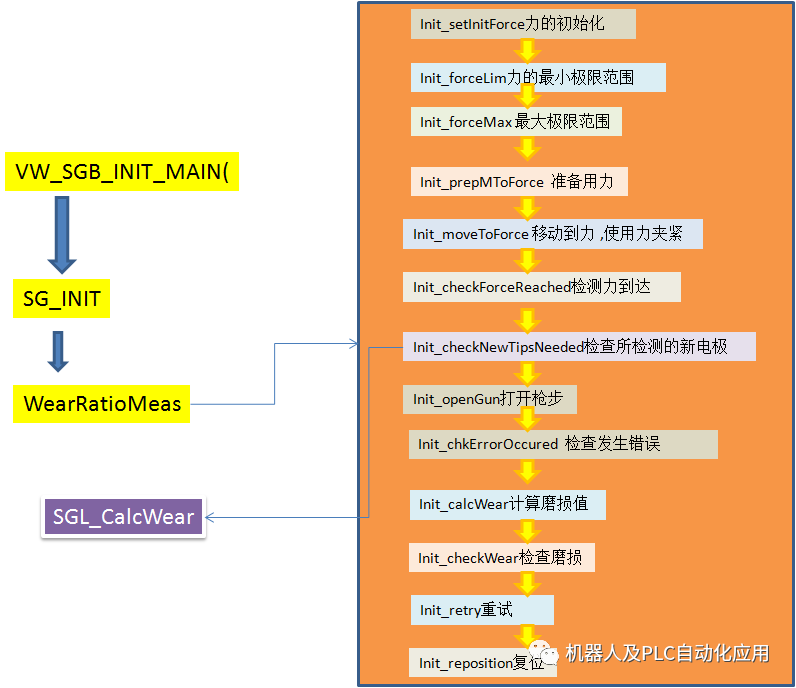
1.SGL_CalcWear 测量损耗
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 0
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 0
-
KUKA机器人伺服驱动模块维修2021-09-17 0
-
电伺服焊钳铣削分析:用户铣削2020-06-11 2781
-
KUKA电伺服焊钳测量原理分析2020-06-30 1868
-
FESTO气伺服焊钳气管接错后故障分析2020-07-13 2473
-
简述KUKA外部轴的几种应用2020-08-10 2440
-
简单介绍KUKA外部轴应用2020-10-27 2479
-
KUKA机器人焊钳铣削清零方式2021-06-18 2589
-
气伺服焊钳为什么会发出钳E1超出软件限制报警2022-07-26 960
-
FESTO焊钳故障报警分析2022-08-15 1186
-
浅析KUKA机器人气伺服焊钳虚拟外部轴的配置文件2022-11-10 797
-
VASS KUKA电伺服焊钳的SG_Background控制2023-01-14 1556
-
KUKA机器人固定焊钳的铣削控制2023-04-13 549
-
气伺服焊钳的力超时故障分析2023-04-24 361
全部0条评论

快来发表一下你的评论吧 !
