

PIC单片机开发环境_PIC单片机引脚的三种状态
控制/MCU
描述
PIC单片机开发环境
1.PIC单片机的开发环境常用的是MPLAB, MPLAB可以从微芯公司网站上下载;这个开发环境自带的是汇编程序的编译器,如果想用C语言做开发,那么需要下载相应的C语言编译器并安装,配套的C语言编译器为 MPLAB-C18, 可以从微芯公司网站上下载。
2.首先下载好MPLAB和MPLAB-C18两个软件并解压。
首先安装MPLAB,解压好的MPLAB如下图所示:

双击setup,前半部分直接点击next即可,到中间部分会出现如下图所示的选择框:
这里可以选择是,后面的点击next即可。MPLAB安装完成之后,重启系统(这一步很重要)。
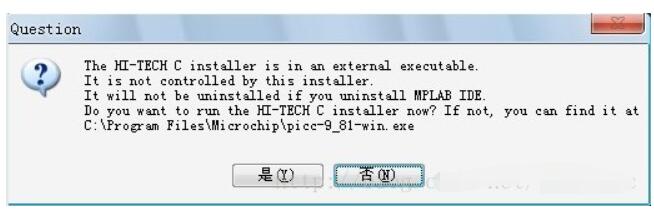
接着安装 MPLAB-C18 ,解压之后的文件夹里面会有一个
图标,双击运行这个文件,前面点击next即可,尽量不要修改安装路径(否则可能出现不必要的麻烦),到下面这幅图片所示的位置按图片上的选择:
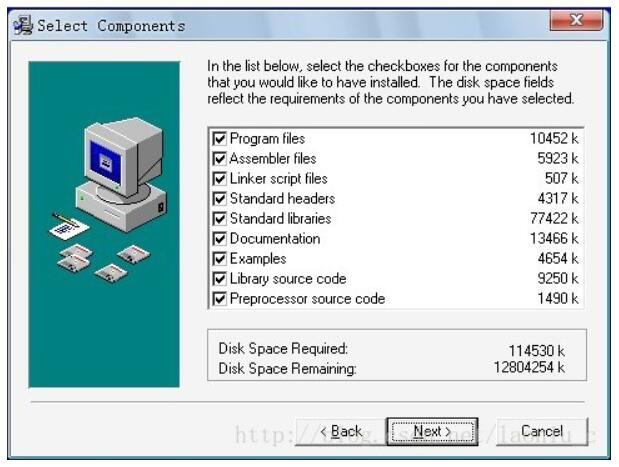
点击next会到下面的界面,按下图勾选:
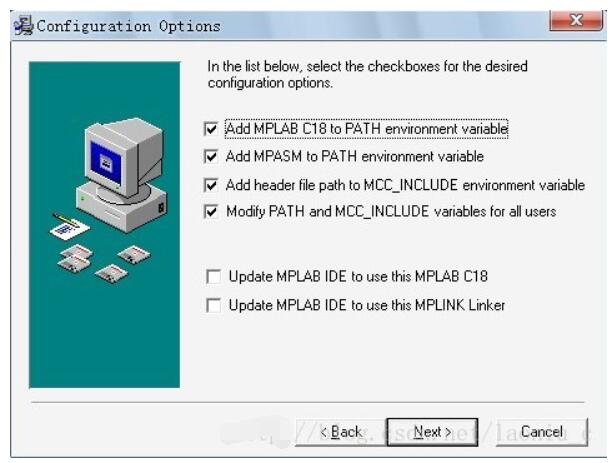
然后继续点击next直至完成。
MPLAB-C18 安装完成之后需要检测一下,检测的方法是打开MPLAB--》project--》set language Tool Locations--》microchip C18 Toolsuite--》展开此项--》出现executables--》展开executables检查下图所示的后三项的路径是否正确,鼠标点击到相应的项之后路径会在下方的location方框中列出来。
如果都确定无误,那么C18安装成功。
3.建立一个PIC的工程
1)新建工程:project--》project wizard.。。--》下一步--》选择芯片型号--》下一步--》Active Toolsuiite--》选择为Microchip C18 Toolsuites--》下一步(有一个项目前面是一个红色的叉,点击下一步会弹出对话框,可以在刚出来的默认选项中(也就是MPASM Toolsuite下)将路径复制粘贴到下面即可)--》下一步--》点击browse选择一个已经存在的文件夹打开这个文件夹--》填写工程名(mcp作为后缀,尽量不要包含中文路径)--》下一步--》不用添加文件到工程直接接着点下一步--》完成。
2)新建一个file,然后保存为.c文件。
3)点击view--》project即可显示出来工程的相关文件夹。
4)点击source文件夹右键添加:将刚才保存的.c文件添加到这个文件夹。
5)点击Linker文件夹右键添加:c18安装文件夹lkr文件夹--》单片机型号(如果程序编好用来icd2调试单片机型号+i,不用icd2来调试不要加i,直接单片机名就行)。
6)配置位的设置(configure--》select bits):将Configuration前面的勾去掉,如果不去掉勾的话(可以再程序中写语句完成等这个配置),第一项(时钟)4M是分界点,高于4M选择HS,等于4M中间XT,低于4m选择LP;第二项上电Timer:enable;电源电压降低(disable);看门狗定时器(disable);低电压编程:disable。然后确定即可。
PIC单片机引脚的三种状态
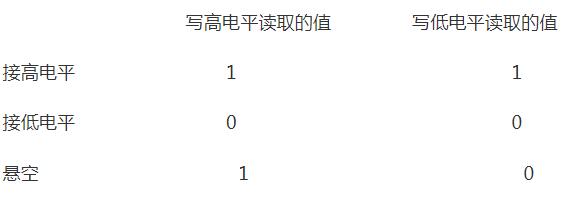
PIC单片机的引脚有三种状态:接地、接高电平和悬空。最近做编码时试验了PIC的这个功能,相对51来说方便很多,可以不用类似PT2262这样的编码芯片。要识别引脚的状态,只要对某个引脚先写高电平然后读取引脚值,再写低电平然后再次读取引脚值就可以了,根据两次读出的结果就可以判断引脚状态了。
-
PIC单片机引脚中断程序的设计技巧2009-10-30 1432
-
PIC系列单片机的优势所在。2012-03-14 0
-
PIC单片机2013-09-01 0
-
瑞萨单片机开发环境2021-07-14 0
-
PIC单片机是什么2021-07-14 0
-
PIC单片机有何作用2021-11-24 0
-
PIC系列单片机的主要应用领域2021-11-24 0
-
PIC单片机有哪些功能2021-11-24 0
-
PIC单片机基础知识2009-01-18 865
-
PIC单片机概述2010-12-19 644
-
PIC8引脚带A/D的单片机的特点2011-05-04 4835
-
PIC单片机教程_PIC单片机学习要点2012-06-28 16252
-
PIC系列单片机2021-11-16 1688
-
PIC单片机(PIC16F15323)的环境搭建2021-11-16 551
-
【PIC单片机】1.开发环境MPLAB X IDE搭建2021-11-16 679
全部0条评论

快来发表一下你的评论吧 !
