

能耗制动控制原理和电路设置
电子说
描述
随着机械工业的快速发展,许多设备或机床,如数控车床、数控钻床、专用车床、卧式镗床等,都要求能迅速停车,以缩短辅助生产时间,提高生产效率。这就要求对电动机进行制动,强迫其立即停车。制动停车的方式有两大类,机械制动和电气制动。机械制动采用机械抱闸或液压装置制动,其优点是控制简单,缺点是机械结构复杂、制造成本高;电气制动是使电动机产生一个与原来转子的转动方向相反的制动转矩,其优点是整体结构简单、制造成本低、利于机床实现自动化控制,缺点是电气控制线路稍微复杂。
1传统能耗制动控制电路
1.1传统能耗制动控制原理
图1所示为传统能耗制动控制电路图,图中整流装置由变压器TC和整流二极管组成,通过桥式整流电路把TC输出的交流电变成直流电。KM2为制动用的接触器,KT为时间继电器,R是可调电阻,其作用是调节制动电流的大小。
停车时,按停止按钮SB1,KM1失电切断交流电源,并使KM2得电,使电动机M加入直流电源,进行能耗制动。KM2得电的同时KT得电,当制动到零速时,延时打开的动断触点按预先调整好的时间打开,使KM2失电,切断直流电源,制动完毕。

图1传统能耗制动控制电路图
1.2传统能耗制动控制电路存在的一些缺陷
图1所示能耗制动控制电路的优点是制动主控制线路简单,仅由变压器TC、整流二极管、可调电阻R、接触器KM2组成,使用元件少,设计、制作、安装调试方便;其缺点是:1)可调电阻R调节制动电流范围有限,且灵敏度不足;2)对于大中型电动机,要用大电流的整流二极管,使用时间长了整流二极管容易失效;3)成本高,因为变压器的容量不小,因此变压器价格不低,整体成本较高;4)图1所示能耗制动控制电路仅用于小型电动机,对于中大型电动机还得另寻其他设计方案。
2一种新颖、适用的能耗制动控制电路的设计
2.1新颖、适用的能耗制动主控电路的原理
图2所示为可控硅整流电路,该整流电路由可控硅SCR、续流二极管D1、接触器KM2组成。当KM1断开的同时,KM2接通,此时电流由火线W相→接触器KM2→电动机定子绕组线圈→接触器KM2→可控硅SCR→零线N形成回路。在W相的正半周内,可控硅SCR承受正向电压,在ωt=α时,在控制极引入触发脉冲,SCR即导通,电压加到电动机定子绕组线圈两端,同时有电流流过。在W相的负半周内,可控硅SCR承受反向电压而阻断,此时加到电动机定子绕组线圈两端电压为零,因此在电动机定子绕组线圈上得到一个单向脉动电压VL,如图3所示。同时,由于续流二极管D1的作用,在电动机定子绕组线圈上得到一个回路电流iL,如图3所示。
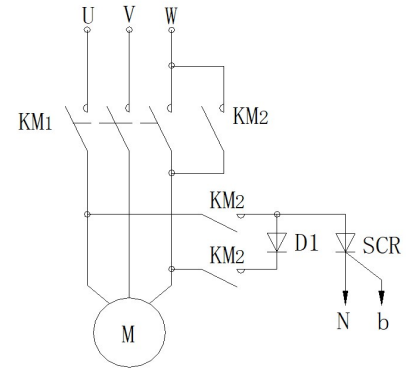
图2可控硅整流电路图
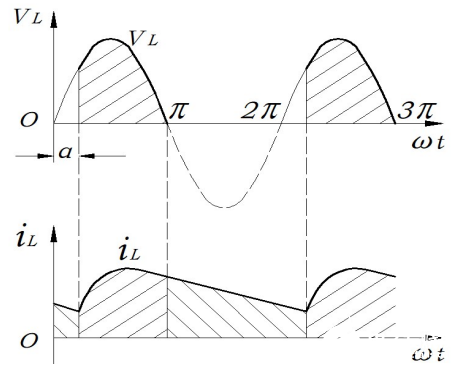
图3波形图
加大控制角α,可使电动机定子绕组线圈回路电流iL的变小,此时制动时间变长;减小控制角α,可使电动机定子绕组线圈回路电流iL的变大,此时制动时间变短。
2.2可控硅触发电路的设计原理
图4所示,为可控硅触发电路图,图中TC为同步变压器,它的原边接在主电路W相电源上,副边得到同频率的交流电压,经桥式整流后,再经稳压管限幅,在稳压管D2两端获得一个梯形波电压,如图5所示。此电压作为可控硅的供电电压。因此,当交流电源电压过零时,单结晶体管BT33F两基极的电压也过零,此时电容C1通过R4很快放电到0V,因而,每一半周开始时C1总是从零开始充电,从而使下一个半周电容从零开始充电,这样就可使每半周发出一个触发脉冲的时间相同。
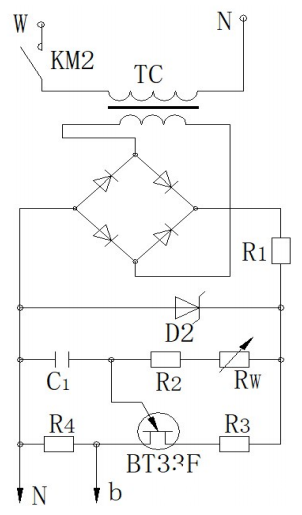
图4可控硅触发电路图
梯形波电压通过电阻R2+RW向电容充电,当电容两端电压C1等于单结晶体管BT33F的峰值电压时,电容经BT33F管向电阻R4放电。在电容的放电过程中,BT33F管发射极电位急剧下降,当低于谷点电位时,BT33F管便截止,R4输出电压降到0V,即完成一次振荡。放电一结束,电容又开始重新充电并重复上述过程,结果在电容C1上形成锯齿波电压VC1,如图6所示,而在电阻R4得到一个周期性的尖脉冲输出电压,如图6所示。
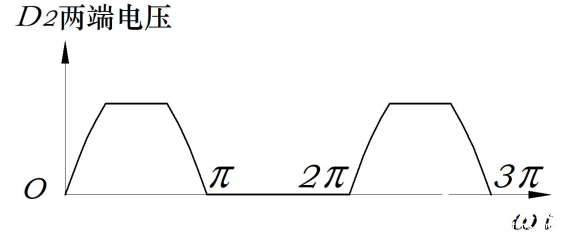
图5稳压管两端电压波形图
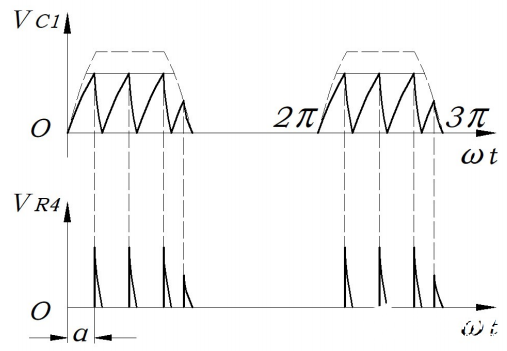
图6电压波形图
由于在每个半周内,第一个触发脉冲时刻取决于电容C1充电常数τ=(R2+RW)C1的大小,电容C1充电常数小,可控硅的控制角α就愈小,整流输出平均电压也愈高。在电路中,调节可调电阻RW的大小来改变充电时间常数,从而达到改变α角使触发脉冲移相的目的。
3可控硅能耗制动控制电路设计的局限性
对于单速电动机,用可控硅能耗制动控制电路有许多优点:1)可调电阻调节制动电流范围大,且灵敏度高,制动效果好;2)对于大中型电动机,可以设计成一个通用电路,针对不同功率的电动机,只更换可控硅与续流二极管即可;3)成本低,因为变压器的容量小,因此变压器价格不高,整体成本较低;4)线路简单,维修方便。但对于双速电动机,直接用可控硅能耗制动控制电路制动效果有一定的局限性。
对于双速电动机,首先考虑的是高速极的制动效果,当此方案用在高速极时,因电动机转速较高,电动机绕组线圈产生的感应电动势较大,通过调整图4可调电阻RW的大小来满足制动强度的要求。当电动机低速转时,如制动线路完全按高速极的线路,因电动机转速较低,电动机绕组线圈产生的感应电动势较小,因此出现制动强度不足的现象,此时要改变RW的大小来满足制动强度的要求。当电动机低速转时,可在电阻RW上并上另一个电阻,调节此时的制动强度,来满足快速制动的要求。
-
PWM变频器的能耗制动与再生制动2012-08-15 0
-
全波能耗制动控制电路解析2021-01-19 0
-
能耗制动伺服电机简介2021-08-30 0
-
单相桥式整流能耗制动电动机控制电路图2007-10-13 2489
-
三相半波整流能耗制动电动机控制电路图2007-10-13 3335
-
一种简单实用的能耗制动电动机控制电路图2007-10-13 605
-
直流能耗制动电路图2007-10-13 1853
-
双重联锁正反转启动能耗制动控制电路图2008-10-17 16629
-
电动机能耗制动的控制线路图(电路)2008-12-06 19907
-
直流能耗制动电路2009-02-09 1072
-
PWM变频器的能耗制动电路2009-02-16 1178
-
时间原则控制的单向能耗制动控制线路2010-03-31 13661
-
能耗制动控制电路图2019-11-11 24397
-
能耗制动的工作原理_能耗制动的优缺点2020-01-15 29524
全部0条评论

快来发表一下你的评论吧 !
