

光电编码器对电机转子位置进行精确的检测方案
工业控制
描述
在伺服系统的矢量控制算法中坐标变换、速度闭环和位置闭环都要用到电机转子的实际位置,因此必须对电机转子位置进行精确的检测。常用的位置检测装置有光电编码器、自整角机、旋转变压器、光栅角度传感器和感应同步器等,而常用的速度检测装置有测速发电机、光电编码器、霍尔速度传感器和测速电桥等。
由于光电编码器不仅能测位置还能通过一定的算法测速度,因此伺服电机通常在转子轴的非负载端装有光电编码器。随着光电子学和数字技术的发展,光电编码器广泛用于交流伺服电动机的速度和位置检测。
光电编码器通常分为增量式光电编码器、绝对式光电编码器和混合式光电编码器。增量式光电编码器的转轴每转动一圈,输出固定数量的脉冲,这由所用编码器的线数决定。转动时,可连续输出与旋转角度对应的脉冲数,静止状态不输出脉冲,它的缺点是不能直接检测出轴的绝对角度;绝对式光电编码器对应转轴的旋转角以格雷码形式并行输出绝对位置值,所以在使用中无需计数器。它在通电状态下输出旋转角度,在掉电和上电时都能正确输出旋转角度而不必回归原点,提高了系统的响应速度。混合式光电编码器,就是在增量式光电编码器的基础上,增加了一组用于检测永磁伺服电机磁极位置的霍尔传感器。它输出两组信息:一组信息用于检测磁极位置,带有绝对信息功能,另一组则完全同增量式编码器的输出信息。
本系统使用永磁同步电机自带的 2500 线的混合式光电编码器,该光电编码器输出两组差分信号,一组信号为 A+(A-)、B+(A-)、Z+(Z-),用于位置和转速检测;另一组为 U+(U-)、V+(V-)、W+(W- ),可以用于电机转子初始磁极位置检测,带有绝对信息功能,用于电机的启动。其中 A、B 两路信号在相位上互差 90 度,转子每转一周各产生 2500 个 A 、B 脉冲,将 A 、B 两路脉冲输入 DSP 的正交解码电路四倍频之后毎转可对应 10000 个脉冲,提高位置检测的精度。并且利用 A、B 脉冲的相位超前和滞后可以方便的判断出电机的旋转方向。转子旋转一周光电编码器发出一个 Z 脉冲,所以 Z 脉冲常用于消除 DSP 计算中所产生的积累误差。其中 A 相脉冲的处理电路如下图 所示,其它各路脉冲的处理类似。
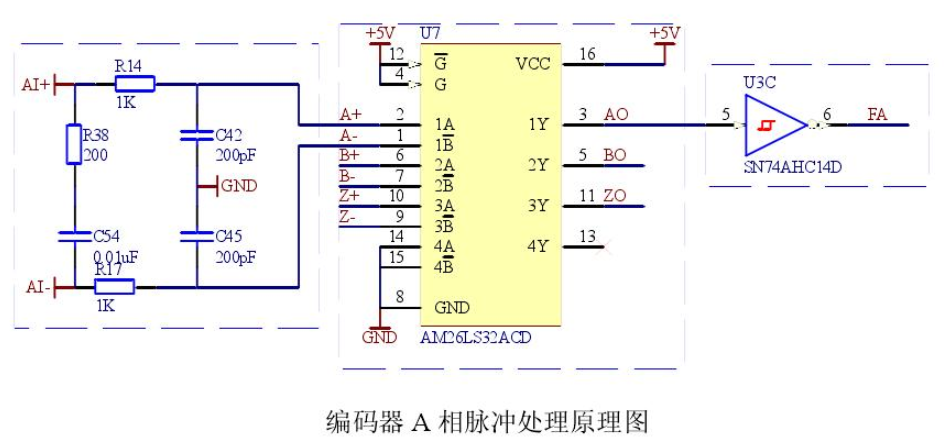
图 4.8 中 AI+和 AI-为编码器发出的差分信号,因编码器传出的脉冲信号可能含有杂波,所以需要用滤波电路将其滤除,左边为滤波电路,中间为差分接收器,本文采用的是 AM26LS32,脉冲波形可能不规则,本文采用施密特触发反相器 SN74AHC14 对其进行整形和反相,将经过处理的 A、B、Z 信号接到 DSP 的 QEP 口进行位置和速度的计算,经过处理的 U、V、W 信号接到 DSP 的 I/O 口,用以判断系统上电时电机转子的初始位置,以实现电机的启动。
-
使用stm32电机库配置电机启动,如何进行初始转子位置?2024-03-25 0
-
永磁同步电机全速范围转子定位系统设计2016-01-06 0
-
请教关于电机转子初始位置的问题2018-08-06 0
-
光电位移编码器在交流伺服电机中的应用2018-11-06 0
-
伺服电机位置自动检测霍尔元件2020-06-30 0
-
怎样检测电机转子的初始位置2021-09-16 0
-
【原创分享】磁旋转编码器在永磁同步电机位置测量中的应用2021-09-22 0
-
基于复合式光电编码器的永磁同步电机启动方法研究2009-10-30 589
-
光电编码器在电机控制中的应用2009-04-20 2213
-
光电编码器位置检测研究与应用2011-08-02 866
-
基于绝对式光电编码器转速测量方案2017-09-01 1087
-
如何实现复合式光电编码器PMSM的启动方法2021-03-12 1020
-
伺服电机编码器原理及使用注意的事项2023-08-25 1190
-
伺服电机编码器原理及编码器分类2023-09-25 1094
全部0条评论

快来发表一下你的评论吧 !
