

一文解析C2机器人的内部结构
描述
由C2机器人风扇故障联想到C2机器人的内部结构:
电路分配图:
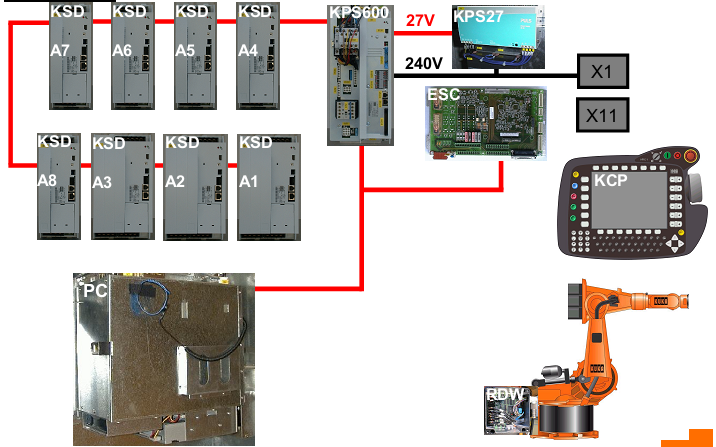
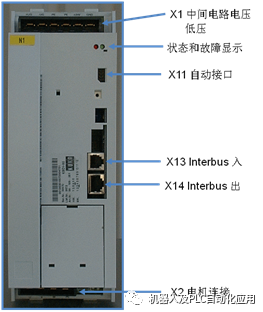
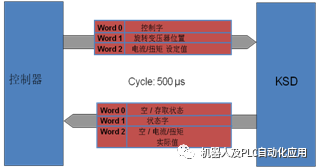
KRC2主要控制部分-信号传输
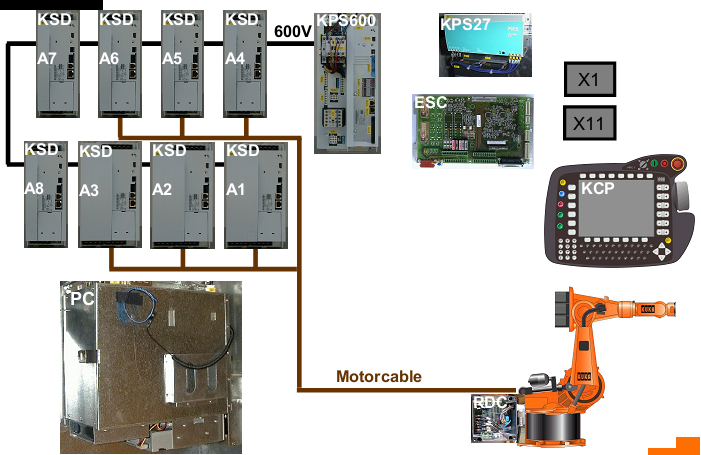
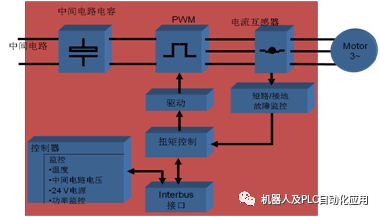
KRC2主要控制部分-电机电源控制
KRC2主要控制部分-安全回路
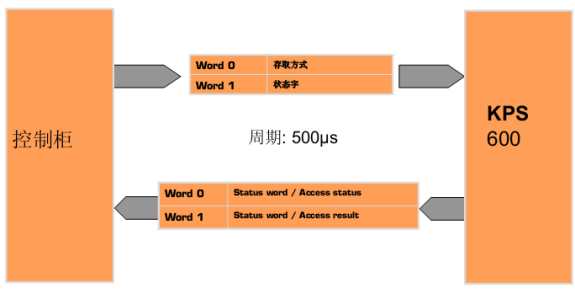
KUKA Power SupplyKPS 600电源供给模块:
TheKPS 600 的作用:
•主要的电源供应
•开始回路的电源供应
•刹车控制(主要6个轴的以及额外2个轴的)
•通过Interbus来控制DSE-IBS的界面
•24 V 电压分配
•电池电路
并且已经获得下面的信号 : 热槽温度,控制柜内部温度,控制柜风扇温度,IC 电压.
通过Interbus在KPS和控制柜之间传递的信号:
KPS-27提供27V电压给
·刹车
•外围电路(max. 10 A)
•机器人控制器
•伺服控制器
• 电池
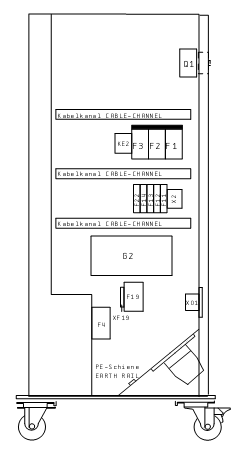
主要元器件的位置:
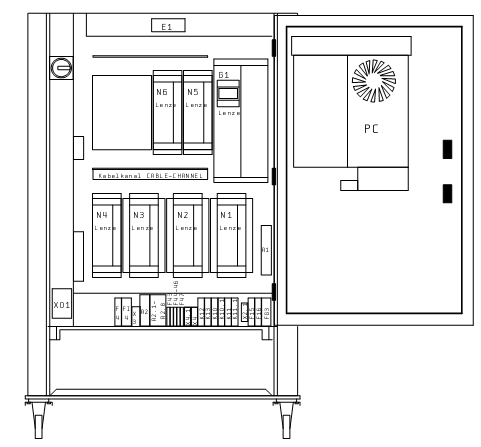
保险,空开的位置:
电机保护F1: KPS600/20
电机保护F2: KPS27
电机保护F3: Fan
保险丝 F4: 服务插座/ 控制柜照明240 V (可选)
电机保护F5: 外加的冷却系统(可选)
F11: 24 V 供应KPS600 有电池备份(X7)
F12: 24 V 供应KPS600 无电池备份(X6)
F13: 控制柜照明24 V
F14: ESC 无电池备份的电源供应
F15: PC 有电池备份的电源
F16: RDC 有电池备份的电源
F17: ESC-CI 有电池备份的电路板, KCP 供应
F18: KSD 有电池备份的电源
F19: 刹车供应KPS600 (X12)
FG3: 电池保险丝
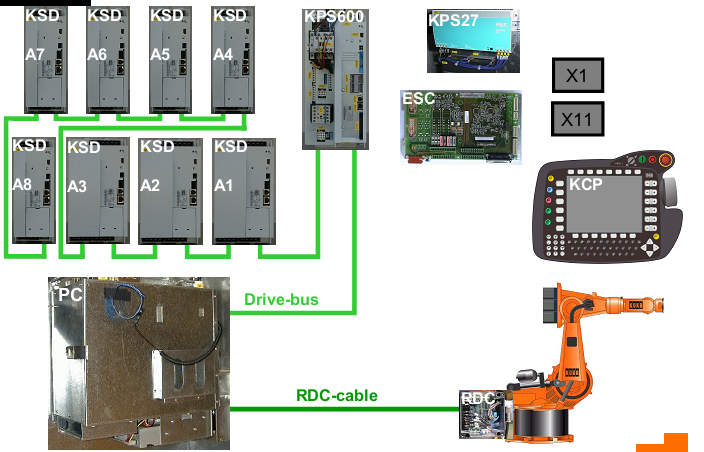
KSD KUKA ServoDrive KUKA伺服驱动器
伺服驱动器功能描述
•扫描导向电流或者逻辑控制
•所有驱动器的功能和硬件检测
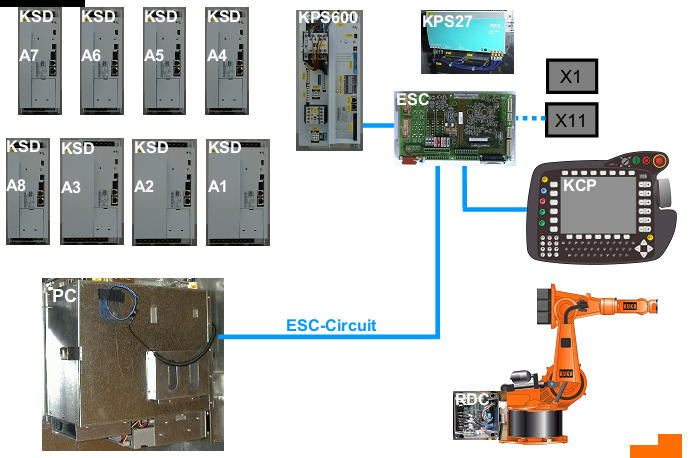
电子安全回路(ESC)
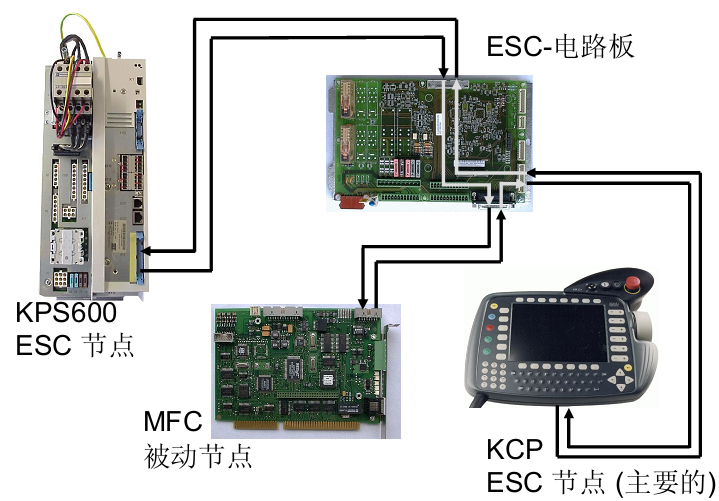
ESC(Electronic Safety Circuit,电子安全回路)是一个数字电路, 用以控制一个安全的系统。这个系统一直监视着所有相关的部分。ESC上的模块上连接的所有节点都通过电源或者信号电缆相连接。
ESC可以侦测到的信号:
1.两个频道传过来的交叉信号
2.由一个供应电压和一个频道传输过来的交叉信号
3.通信错误(例如电缆中断)
4.硬件错误(不安全的输出导致继电器错误动作)
5.ESC监测到的有缺陷的信号
双重回路上紧急开关量的比较:
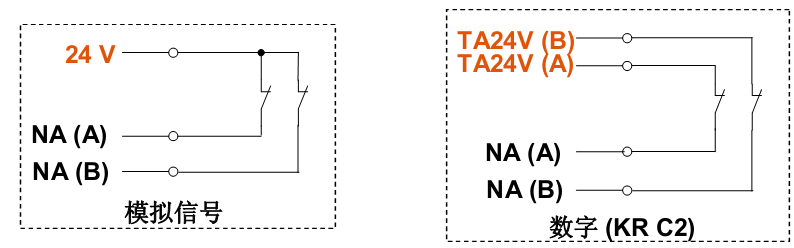
ESC –监测到不安全的输出:
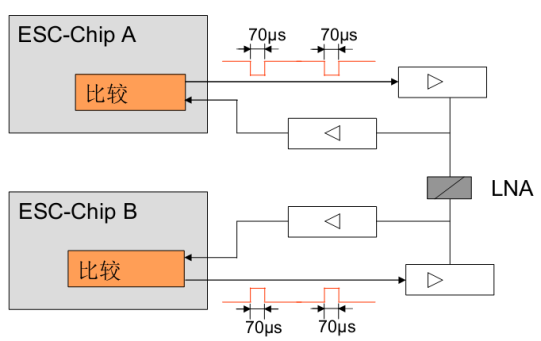
每个ESC都会发出一个信号,并且会将反馈的信号进行比较.
ESC 主板功能介绍:
跳线/ 其他安全系统的跳线 ---X13
用户界面X11, 输出:驱动开启, 24V 直流电源供应 ---X12
用户界面X11,输出:操作模式, 内部紧急开关 ---X11
用户界面X11, 伺服未连接 ---X8
用户界面X11,测试输出,外部紧急开关 ---X9
用户界面X11,输入:驱动开启, 允许开关,操作者安全 ---X10
连接到KCP(CAN-Bus) ---X21
用户设置I/O到X11;16输入/20O输出via CAN bus(可选) ---X7
用户界面X11, 内部/外部电源供应--- X6
连接到KCP (ESC-Bus)--- X5
固定操作模式开关/ E7 特别的开关(可选) ---X4
连接到MFC ---X3
连接到KPS600 ---X2
电源供应(有或无电池备份)--- X1
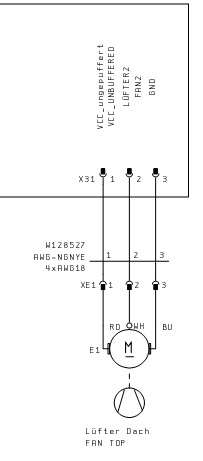
风扇电机转向
顶部风扇: 风扇报警或者没有反馈,机器人会没有使能,顶部风扇E1接在A1板上X31端口
- 相关推荐
- 机器人
-
变结构智能服务机器人2013-10-31 0
-
双足机器人2013-11-25 0
-
工业机器人的基本结构2015-01-19 0
-
C语言教学机器人2016-03-28 0
-
机器人的主要技术参数2017-08-15 0
-
工业机器人结构、驱动及技术指标详解2018-10-12 0
-
工业机器人的末端关节旋转该精确控制?2018-11-01 0
-
工业机器人的技术原理2018-11-23 0
-
ABB机器人维修保养指南2020-08-19 0
-
焊接机器人的结构与原理2020-11-16 0
-
工业机器人组成结构相关资料分享2021-07-05 0
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 0
-
详细解析工业机器人内部机构2019-02-28 4456
-
解析工业机器人的内部结构2019-05-15 4022
-
一文知道KUKA-C2机器人内部结构2020-09-13 2812
全部0条评论

快来发表一下你的评论吧 !
