

事件摄像机为无人机动态避障问题带来新突破
军用/航空电子
描述
如今,无人机在航空成像、空中机动等新市场上具有相当大的潜力,但是安全问题一直是限制它发展的关键因素。在无人机坠毁的公共事件中,约有1/3是由于物体抛击或撞击鸟群而发生的。
现有的无人机避障技术,大多假设环境中的障碍物是静态或准静态的(即缓慢的相对运动),几十毫秒的反应时间,不足以支持无人机在复杂的动态环境中迅速导航,并安全避开高速移动的物体。
近日,瑞士苏黎世大学的Davide Falanga等人,通过在无人机上配置“事件摄像机”,为动态避障问题带来了新的突破口。
事件摄像机
2016年,Davide Scaramuzza实验室发布了一种称为“事件摄像机”的动态视觉传感器。它是受昆虫眼睛的启发而产生,用以记录场景的变化而非场景的外观。
当把它指向一个不动的场景时,并不会看见任何东西,但是一旦有了运动,事件摄像机就会以每像素为单位,用高频刷新率显示运动变换。
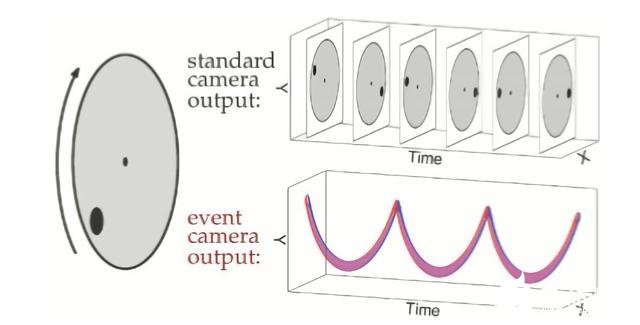
不同于标准相机以固定速率捕捉帧,事件摄像机关注时空中事件的发展,以异步方式测量每像素的亮度变化。
图片来源:University of Zurich
与标准像机相比,它具有显著的优势,即非常高的动态范围、无运动模糊以及微秒量级的延迟。但是,由于输出是由一系列异步事件组成的,而不是实际的强度图像,传统的视觉算法无法应用,因此需要进行范式转换。
无人机避障
无人机能够快速躲避动态障碍物,对于大规模部署安全飞行至关重要。而其中的关键在于控制知觉和动作之间的时间延迟,因为等待的时间越长,无人机反应和执行回避动作的时间就越短。
这种障碍冲突不仅会破坏环境,还会导致严重的硬件故障。此外,由于无人机的微型化发展,其有效载荷能力也有所降低,这对它们所能携带的传感和计算资源构成了硬性限制。
无人机避障实验
对于无人机自动避障的状态估计,即由无人机与周围环境进行交互,了解自己的位置、移动速度和方向,其中最精确的方法是采用非车载运动捕捉系统。然而考虑其昂贵的费用,像机反而成为了自动导航的一个可行选择。
但是标准像机本身也有两个重要问题:当传感器的运动超过相机的帧速率所能“冻结”的范围时,相机图像往往会变得模糊;而且相机(就像眼睛一样)在光线方面非常敏感,必须要恰到好处,不能太少或太多。
标准像机与事件像机拍摄对比
而事件摄像机进一步发展,在实现功能的同时,也克服了标准像机的缺陷。它的输出比帧更稀疏轻便,处理成本更低;而且利用每个事件的时间统计,不需要在静态和动态对象之间进行分割;更重要的是其高时间分辨率(按微秒顺序)允许低延迟感测,能有效提高执行时间。
无人机避障技术多种多样,“事件摄像机”在考虑技术广泛适用的基础上,提供了一种可行的思路,或许会带来新的发展。
责任编辑:gt
-
无人机全景监测:空域管理的新革命2024-02-20 0
-
【RSP1多普勒雷达传感器申请】无人机智能导航系统2016-01-11 0
-
看无人机和VR是如何结合起来的?2016-06-22 0
-
这个外国大叔用TFmini自制了这样一个无人机2018-02-02 0
-
24GHz微波测距雷达 FMK24-A系列,无人机避障雷达2018-04-06 0
-
无人机突破性的电池管理设计2018-06-26 0
-
2018年无人机的行业报告,GDU普宙脱颖而出2018-08-28 0
-
【MM32 eMiniBoard试用连载】无人机摄像2020-05-07 0
-
无人机探测技术2020-07-29 0
-
无人机云台电机是什么电机?2021-05-25 0
-
无人机云台是什么2021-09-01 0
-
如何设计出一个利用PPM控制无人机动作的四轴无人机?2021-09-23 0
-
毫米波雷达模块发展,无人机雷达避障技术应用,雷达传感器方案2021-09-27 0
-
无人机动态测试仿真与训练系统设计2009-12-16 599
-
关于无人机摄像机,我们该如何挑选2020-06-18 2768
全部0条评论

快来发表一下你的评论吧 !
