

 暴雨天气ADAS失灵,自动驾驶能避免传感器失灵问题吗?
暴雨天气ADAS失灵,自动驾驶能避免传感器失灵问题吗?
描述
电子发烧友网报道(文/程文智)今年新上的车型,大部分都配置了L2级智能驾驶辅助驾驶和网联车机这两项功能,这两个功能不仅大大提升了行车的安全性,也的确给驾驶人带来了更好的驾驶体验。都说“由俭入奢易,由奢入俭难”,一旦我们体验到了智能驾驶带来的好处后,碰到智能辅助驾驶功能不能使用的时候就显得异常难受。
南方8、9月份是台风比较多的月份,在这个时间段驾驶过汽车的人应该深有体会,常常会在行车过程中,会碰到突如其来的暴雨“袭扰”。而在大雨中,L2智能辅助驾驶功能常常会受到限制。比如前几天的深圳台风天,就有车主发朋友圈说他的驾驶辅助系统在大雨中失效了(见图1)。
图1:大雨中智能驾驶辅助系统失效提示。
小编随手在网上搜索了下,发现这位网友碰到的情况其实不是个案,不少车主都碰到了这样的问题,有车主还在车质网上进行了投诉。
图2:车主在车质网上投诉驾驶辅助系统失灵。(来源:车质网)
L2级的智能驾驶辅助系统一般配备了哪些传感器,为何会在大雨中就不能工作了呢?
L2级智能辅助驾驶系统为何会失效?
L2级智能辅助驾驶系统在硬件方面比较常规的硬件包括前雷达、前摄像头和后雷达。其中后雷达实现的功能最主要的就是盲区检测,即侧后方既不在侧窗视野中,也不在后视镜中能看到的区域,还有开门预警(开门时,监测候方来车)、后碰撞预警等其他功能。
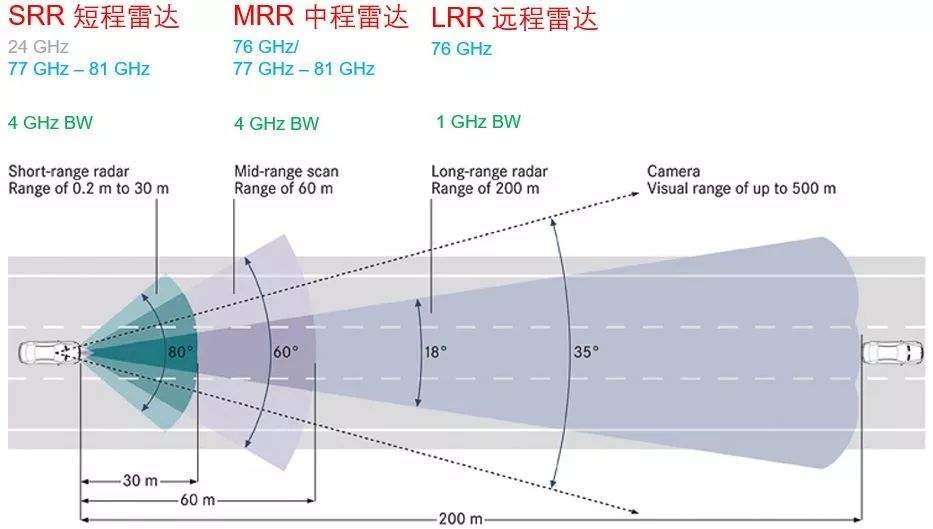
图3:毫米波雷达探测距离。
汽车前向传感器方面有些复杂,不同的供应商的原理有些不同,主流的有单雷达、雷达+摄像头、单摄像头等方案。在雷达+摄像头方案中,常规做法是前雷达主要负责障碍物和车辆识别,由于雷达受环境影响较小,目标识别准确度高,大部分车辆的主动安全碰撞预警和主动紧急制动功能都是基于雷达的目标来触发。同时雷达还会负责ACC自适应巡航等控制。而前摄像头主要负责车道线识别、限速标识识别、静止目标识别、以及障碍物类型识别等功能,车辆转向控制如车道保持、车道偏离提示、限速提示、自动远近光等功能都是通过摄像头实现。目前部分供应商尝试通过摄像头来实现雷达+摄像头的所有功能,并通过软件优化来提升在多种光照条件下的摄像头识别能力,以降低L2智能驾驶辅助系统的成本。
在雷达部分,目前有毫米波雷达、超声波雷达和激光雷达几种。不过由于毫米波穿透雾、烟、灰尘的能力强,具有全天候(大雨天除外)特性和低成本原因,在L1到L5级别的ADAS系统中都将有一席之地。特别是在现阶段的L1/L2智能驾驶辅助系统中,主要是毫米波雷达和摄像头组成,毫米波雷达能探测目标的距离速度和角度,而摄像头则可以识别交通信号、车道线,对场景进行语义分割,两者结合在一起可以实现比较稳定的目标检测、跟踪与分类。车规认证和适用性方面都能满足L2+级别ADAS的系统需求。
但是毫米波也有一个缺点,那就是雨雾对它的影响非常大,吸收很厉害,所以在有雨有雾的天气,毫米波雷达的性能会大大下降。这也就是为什么在大雨天气L2级别的智能驾驶辅助系统传感器失效的原因所在。
英飞凌的何为指出,目前L2级别的毫米波雷达的确容易受到雨雾天气的影响,这主要是由于成本因素考量,选择的是满足日常需求的毫米波雷达,如果要选择可以应付暴风雨情况的雷达,成本会上升不少。
自动驾驶会受影响吗?
其实随着自动驾驶级别的提升,汽车中的传感器数量也会逐渐增多,到L4/L5的自动驾驶阶段,雷达数量将会超过10个、摄像头数量将会超过8个、激光雷达也将不止1个,通过这些多传感器的数据融合,来应对不同路况、不同气候条件下的数据收集。
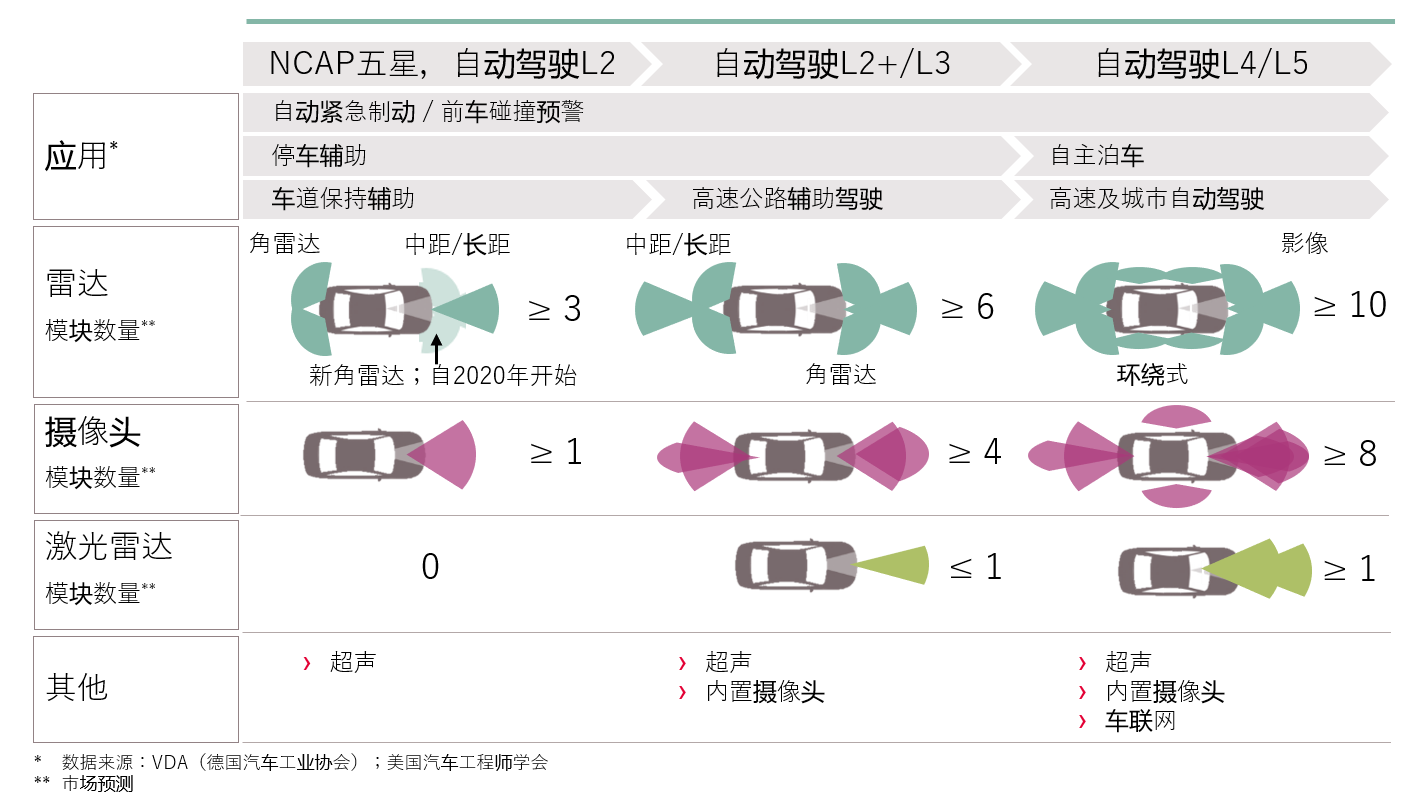
图4:未来几年,随着自动驾驶程度的提高,汽车需要的传感器数量也越来越多。(来源:英飞凌)
其中,激光雷达由于极高的角度分辨率,在自定位和地图构建方面都具有较大优势,所以在L3以上的自动驾驶中,它将会跟毫米波雷达,摄像头,超声波雷达等传感器组成互为冗余的系统。
根据岭纬科技的芮明昭介绍,该公司的已经量产的激光雷达不仅可以点云成像,还能在大暴雨情况下仍能实现400~500米范围内的物体检测。
图5:岭纬科技的激光雷达点云成像演示。
英飞凌的专家认为,解决自动驾驶汽车应对不同路况和天气的措施有以下三种:
一是需要建立针对特殊场景的用户、和对这个场景理解的数据库的积累。比如,欧洲有很多的山路,所以他们在验证无人驾驶的天气和道路的时候,整车厂就开始收集这方面的数据,包括通过点云的数据收集,配合用户的反馈不断完善。相信随着用户数据和场景经验的积累,可以有效地帮助我们收集更多数据,积累经验。
二是,智能驾驶不仅仅是毫米波雷达一种单一的技术。在L3甚至更高级别的智能驾驶时代,可以看到多种传感器,包括毫米波雷达和激光雷达,越来越多不同技术类型的传感器会被加入到ADAS系统当中,作为冗余或者是补充,所以传感器类型的扩充会帮我们更有效地收集外部环境和道路状况的信息。
三是算法的优化。随着数据库和传感器收集的信号的不断积累,可以搭建一个新的框架。这个框架会将不同的数据进行分类,做算法的优化和验证。
相信通过反复的验证和优化下,应该可以最终解决特殊极端天气和复杂路面的问题,从而让自动驾驶时代能够顺利到来。
结语
其实毫米波雷达技术也在不断进步中,据说毫米波雷达未来的制造工艺将会迈向28nm等更先进制程,性能也会更加优秀,再加上激光雷达等其他传感器的组合,应该足以应付自动驾驶对传感器的需求。
本文由电子发烧友网原创,未经授权禁止转载。如需转载,请添加微信号elecfans999。
-
 JasonOldWoo
2020-11-12
0 回复 举报电子元器件越多,犯错误的概率也在提升啊 收起回复
JasonOldWoo
2020-11-12
0 回复 举报电子元器件越多,犯错误的概率也在提升啊 收起回复
-
未来已来,多传感器融合感知是自动驾驶破局的关键2024-04-11 0
-
自动驾驶真的会来吗?2016-07-21 0
-
细说关于自动驾驶那些事儿2017-05-15 0
-
自动驾驶的到来2017-06-08 0
-
可扩展图像传感器平台用于先进驾驶辅助系统和自动驾驶2018-10-11 0
-
自动驾驶的五大传感器各有千秋2020-05-13 0
-
自动驾驶汽车中传感器的分析2020-05-14 0
-
这些自动驾驶传感器,你了解多少?2020-05-18 0
-
传感器融合是通向自动驾驶时代的关键一步2020-05-20 0
-
ADAS视觉传感技术,为朝向自动驾驶趋势发展做好准备2020-06-02 0
-
传感器成自动驾驶“硬实力” 有哪些2020-07-29 0
-
联网安全接受度成自动驾驶的关键2020-08-26 0
-
ADAS到自动驾驶还有多长的路要走2020-12-10 0
-
从ADAS到自动驾驶还有多长的路要走2021-01-28 0
-
用于ADAS系统和自动驾驶车辆中雷达的毫米波传感器2022-11-09 0
全部0条评论

快来发表一下你的评论吧 !
