

微型无人机的电动动力系统的工作原理及应用分析
军用/航空电子
描述
目前大型、小型、轻型无人机广泛采用的动力装置为活塞式发动机系统。而出于成本和使用方便的考虑,微型无人机中普遍使用的是电动动力系统,电动系统主要由动力电机、动力电源、调速系统三部分组成。而我们今天讲的主要就是动力电机、动力电源和调速系统三部分。
4108外转子无刷电机
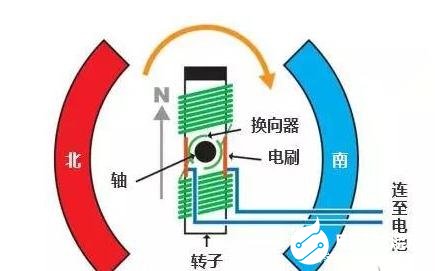
接下来我们先来讲一下动力电机的相关内容。在微型无人机当中使用的动力电机可以分为两类:有刷电动机和无刷电动机。其中有刷电动机由于效率较低,在无人机领域已逐渐不再使用。有刷电机和无刷电机在外观上的主要区别就是:有刷电机是里面的电刷在转动被称为转子,外面不转的永磁体被称为定子,无刷电机是里面的电刷不转被称为定子,外面的永磁体转动被称为转子。当然还有一个最主要的区别就是无刷电机需要用交流电来驱动所以外面需要接上一个电子调速器而有刷电机直流电就可以将其驱动。
下面讲一下无刷电机型号的含义:电动机的型号主要以尺寸为依据。比如,有刷370电机,是指它不包括轴的长度是37mm;无刷外转子2208电机是指它定子线圈的直径是22mm,不包括轴电子线圈的高度是8mm。当然有一些型号是说它相当于某级别的,还有一些是厂家自己命名的。电动机的技术指标很多,与无人机动力特性最相关的两个是转速和功率。转速一般用kV来表示,所谓kV是指每伏特(V)能达到的空载每分钟转速。比如,使用kV1000的电机,11. 1V电池,电机转速应该是1000x11. 1=11100.即每分钟11100转。即每增加1V电机空载转速增加1000转。
锂聚合物电池
动力电源主要为电动机的运转提供电能。通常采用化学电池来作为电动无人机的动力电源,主要包括:镍氢电池,镍铬电池,锂聚合物,锂离子动力电池。其中前两种电池因重量重,能量密度低,现已基本被锂聚合物动力电池所取代。锂聚合物的电池的标称电压是3.7V,满电电压是4.2V,储存电压是3.8V,放电后的保护电压为3.6V。电池的放电能力是以倍率(C)来表示的,它的意思是说按照电池的标称容量最大可达到多大的放电电流。例如,一个1000mAh、10C 的电池,最大放电电流可达1000x10= 10000毫安,即10安培(A)。一般这种电池都是由好几块电芯串联到一起的,例如,3S锂电池,就是由三块电芯串联到一起得到的。一般这种电池的放电倍率可以做到很大,而充电倍率一般不超过5C。
电子调速器
下面讲一下电子调速器。动力电机的调速系统称为电调,全称为电子调速器,英文为Electronic SpedCotoller,简称ESC 。针对动力电机不同,可分为有刷电调和无刷电调。它根据控制信号调节电动机的转速。对于它们在多旋翼无人机中的连接,一般情况如下:
(1)电调的输入线与电池连接;
(2)电调的输出线(有刷两根、无刷三根)与电机连接;
(3)电调的信号线与遥控器接收机连接。
另外,电调一般有电源输出功能(BEC),即在信号线的正负极之间有5V左右的电压输出,通过信号线为接收机及舵机供电。一般电调都具有以下几个功能:
1、整流,将电源的直流电变为交流电
2、稳压,在信号线的正负极之间有5V左右的稳定电压输出
3、调速,通过改变电流来改变电机的转速
4、检测,检测电机是否完好以及是否有遥控器信号
5、换向,改变电机转向
9450螺旋桨
最后再给大家介绍一下多旋翼的螺旋桨,螺旋桨是无人机产生升力的主要部件。在上面那幅图片中有一对大疆精灵4的螺旋桨,它的型号是9450.94:螺旋桨的直径,单位是英寸(in),一英寸等于2.54厘米,螺旋桨直径9.4英寸50:螺旋桨的螺距,单位同样是英寸。螺距:螺旋桨旋转一周上升或前进的理论距离。螺距是5.0英寸(in)
关于正反桨:
正桨:俯视逆时针旋转(CCW)
反桨:俯视顺时针旋转(CW)
这是螺旋桨型号的具体分辨的方法,一般每一种电机都有它适配的螺旋桨,对于一种电机来说螺旋桨过大或过小都不太好,多轴飞行器的操纵主要就是依靠改变电机的转速,使每个螺旋桨产生不同的升力来进行操纵。
责任编辑:gt
-
第四集 知语云智能科技无人机反制技术与应用--无人机的组成与工作原理2024-03-12 0
-
#硬声创作季 无人机设计导论:无人机能源与动力系统Mr_haohao 2022-10-27
-
汽车动力系统大盘点:助你设计绝佳方案2015-04-21 0
-
无人机遥感技术2016-03-11 0
-
无人机技术解答2017-11-15 0
-
无人机中的MCU是如何工作的?2018-10-09 0
-
无人机的工作原理2021-01-13 0
-
本田第四代混合动力系统技术的设计思想和工作原理是什么2021-05-12 0
-
无人机动力系统组成2016-08-09 5980
-
电动动力系统五大电池材料2016-10-26 738
-
无人机动力系统的电机详细介绍2020-01-28 28759
-
微型无人机的电力动力系统是由哪些结构组成的2020-07-24 6990
-
无人机动力系统的作用及如何进行评价2020-09-10 1496
-
无人机的分类和植保无人机动力系统的组成与特点分析2020-10-28 5143
-
无人机结构与系统2022-09-07 843
全部0条评论

快来发表一下你的评论吧 !
