

点云匹配与ICP算法基本思想
描述
点云匹配
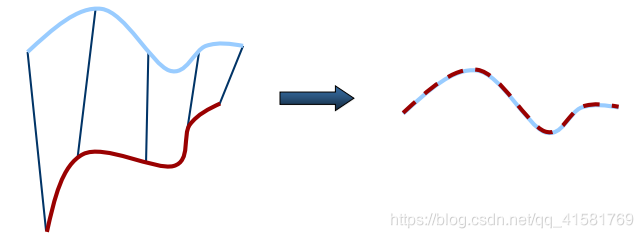
图像配准目的在于比较或融合。针对同一对象在不同条件下获取的图像,因为激光扫描光束受物体遮挡的原因,不可能通过一次扫描完成对整个物体的三维点云的获取。因此需要从不同的位置和角度对物体进行扫描。三维匹配的目的就是把相邻扫描的点云数据拼接在一起。三维匹配重点关注匹配算法,常用的算法有最近点迭代算法 ICP和各种全局匹配算法。
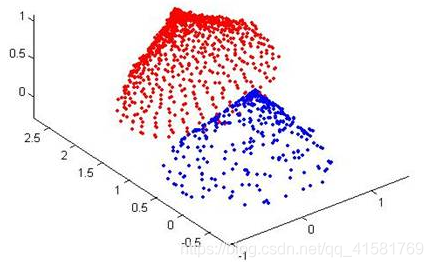
ICP(Iterative Closest Point迭代最近点)算法是一种点集对点集配准方法。如下图所示,PR(红色点云)和RB(蓝色点云)是两个点集,该算法就是计算怎么把PB平移旋转,使PB和PR尽量重叠。
ICP算法基本思想:
三维点云匹配问题的目的是找到P和Q变化的矩阵R和T,对于 ,,利用最小二乘法求解最优解使:
最小时的R和T。
先对平移向量T进行初始的估算,具体方法是分别得到点集P和Q的中心:
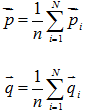
在计算转换之前,从两个点集中的每个点减去相应的质心。

则上述最优化目标函数可以转化为:

最优化问题分解为:
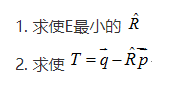
目标函数E(R,t)的优化是ICP算法的最后一个阶段。在求得目标函数后,采用什么样的方法来使其收敛到最小,也是一个比较重要的问题。求解方法有基于奇异值分解的方法、四元数方法等。
ICP算法优点:
可以获得非常精确的配准效果
不必对处理的点集进行分割和特征提取
在较好的初值情况下,可以得到很好的算法收敛性
ICP算法的不足之处:
在搜索对应点的过程中,计算量非常大,这是传统ICP算法的瓶颈
标准ICP算法中寻找对应点时,认为欧氏距离最近的点就是对应点。这种假设有不合理之处,会产生一定数量的错误对应点
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
五种基本算法思想了解一下2018-08-10 0
-
计算机解题的基本思想方法和步骤2020-11-02 0
-
PID控制算法的基本思想是什么?PID控制算法是如何形成的?2021-06-30 0
-
粒子群算法城镇能源优化调度问题2021-07-07 0
-
PID控制算法的基本思想是什么2021-12-21 0
-
PID控制算法是如何形成的2021-12-21 0
-
FDTD算法基本思想2010-08-13 8419
-
基于单位四元数的ICP改进算法2017-01-03 725
-
机器视觉之ICP算法和RANSAC算法2017-02-08 777
-
设计的基本思想,就是尽可能利用“芯片”性能2017-06-20 1368
-
计算机视觉中的ICP算法2017-11-16 6788
-
图像处理基本思想和算法研究2018-01-12 2137
-
三维点云配准过程及点集到点集ICP配准的算法研究2022-11-28 1028
-
ICP方法的两种改进算法:PLICP与NICP2022-12-26 1366
全部0条评论

快来发表一下你的评论吧 !
