

KUKA工业机器人搬运工具操作教程一
描述
项目描述:
被搬运工件位于图卸料区, 机器人末端气爪从卸料区下端将一个工件夹取, 并将之搬运至图堆垛区的一个放置点。
任务一:运动规划和制定程序流程图
运动规划
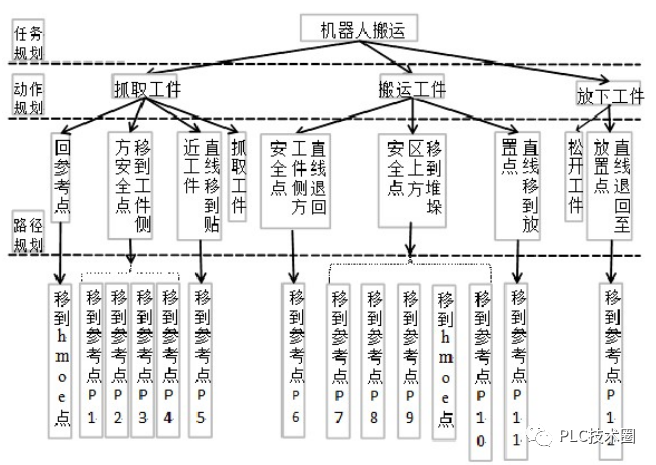
运动轨迹
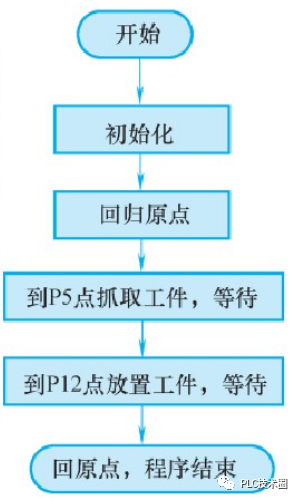
程序流程图
任务二:示教前准备
(1)参数设置(包含坐标模式、 运动模式、 速度)
在示教器过程中需要在一定的坐标模式、 运动模式和操作速度下手动控制机器人达到一定的位置, 因此在示教运动指令前, 必须选定好坐标模式、 运动模式和速度。
(2) 1/0配置
本任务中使用气爪来抓取和释放工件, 气爪的打开和关闭需要通过1/0接口信号控制, KUKA机器人控制系统提供了1/0通信接口, 本任务采用编号为17的1/0通信接口。
(3)工具坐标系设定
以被搬运工件为对象选取 一个接触尖点,同时选取气爪的一个接触尖点, 测试气爪的TCP和姿态
(4)基坐标系设定
以堆垛区平台为对象, 同时选取气爪一个接触尖点,测试基坐标系
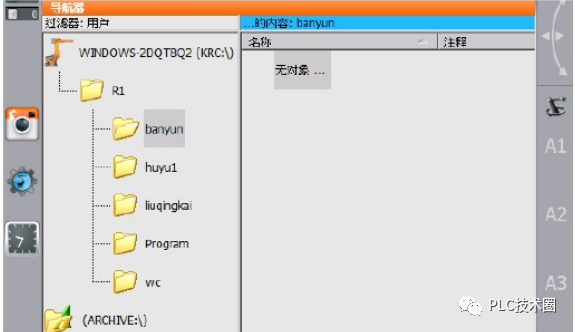
任务三:新建程序
步骤1:点击R1,选择R1文件夹, 点击示教界面左下角【新】软键新建一个文件夹,通过弹出软键盘输入文件夹名“banyun“点击示教界面右下角【OK】软键
步骤2:选择 “ banyun ” 文件夹,点击示教界面右下角【打开】软键,打开该文件夹
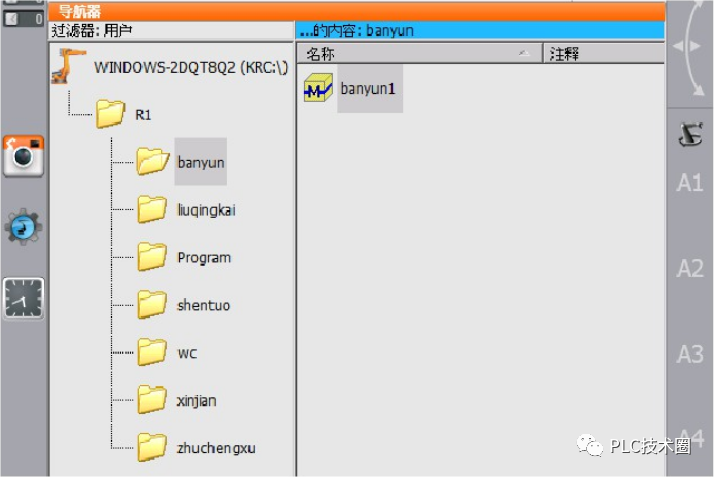
步骤3:点击示教界面左下角的【新】软键, 通过弹出的软键盘输入程序名 “ banyun”,点击示教界面右下角【OK】软键, 信息栏弹出相同程序名的提示信息

步骤4:重做步骤3,将程序名命为“ banyunl”可新建一个程序
待续。。。。。请看下一篇
责任编辑:xj
原文标题:KUKA工业机器人搬运编程与操作(上)
文章出处:【微信公众号:PLC技术圈】欢迎添加关注!文章转载请注明出处。
-
工业机器人的基本结构2015-01-19 0
-
什么是工业机器人2015-01-19 0
-
KUKA重型机器人2015-02-03 0
-
华南机器人应用培训中心工业机器人培训班招生2015-09-02 0
-
未来社会为何更需要搬运机器人2015-12-23 0
-
搬运码垛机器人2016-03-29 0
-
再牛的自动化车间都不能缺少搬运机器人2018-08-20 0
-
零基础玩转工业机器人2018-10-29 0
-
KUKA机器人问题解答2019-07-15 0
-
四元数数控:工业机器人使用机器视觉系统的原因2021-04-29 0
-
机器人搬运码垛工作站介绍2021-07-01 0
-
工业机器人组成结构相关资料分享2021-07-05 0
-
KUKA机器人伺服驱动模块维修2021-09-17 0
-
KUKA工业机器人搬运工具操作教程二2020-09-29 5483
-
KUKA工业机器人搬运工具操作教程三2020-09-29 4504
全部0条评论

快来发表一下你的评论吧 !
