

雪湖科技的激光点云AI计算模块三个技术创新特点
描述
编者按:为深入贯彻落实习近平总书记关于上海人工智能发展的重要指示精神,以及市委、市政府有关要求,小编特开设本栏目,结合近期编撰的《上海人工智能创新发展探索与实践案例集》等成果,及时推出新技术、新产品、新应用,报道新兴企业与团队典型,供大家参考,为人工智能上海高地建设营造良好氛围与生态。
一、基本情况
无人机、辅助驾驶、自动驾驶汽车和智慧公路等的出现和普及推动了激光雷达市场的发展。性能的持续改善以及生产成本的不断降低加速了激光雷达的市场导入。根据相关机构的预计,激光雷达市场在未来5年中将进入快速发展期。全球激光雷达市场规模将从2019年的8.44亿美元增至2024年的22.73亿美元,年复合增长率将高达18.5%。
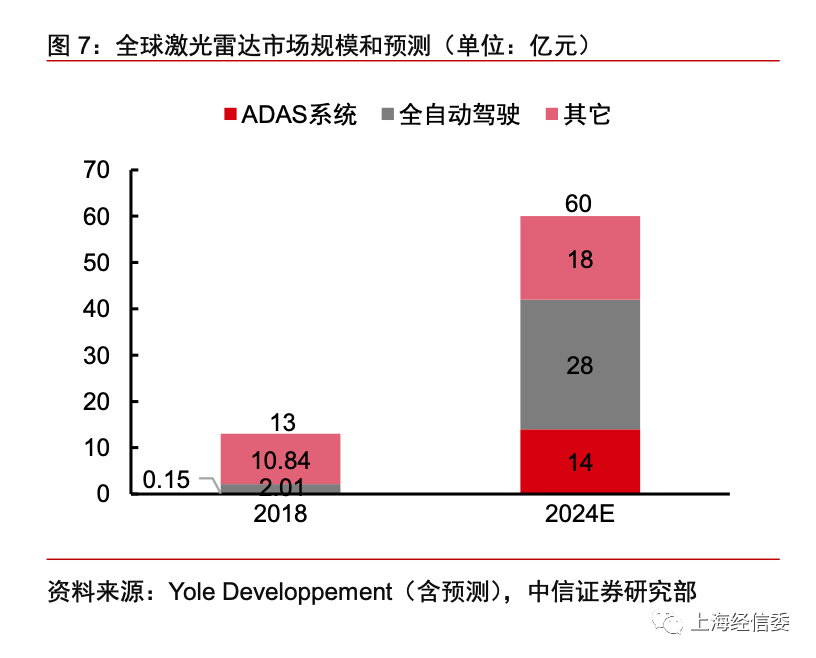
图1. 全球激光雷达市场规模和预测 激光雷达和摄像头是感知环境的核心传感器。激光雷达通过激光主动探测成像,具有不受环境光影响,直接测量物体的距离方位、深度信息、反射率等优点。算法首先对障碍物进行识别和分类,识别准确度和可靠性远超摄像头。整体来说激光雷达获得的信息会更多,可靠性更强。早期受制于成本和可靠性问题,激光雷达未得到大范围使用;但随着成本的降低和线束性能的提升,激光雷达的导入速度在不断加快。 当大家使用更高线束激光雷达的时候,就不仅仅满足于“看到”物体,而更希望从激光雷达的3D点云中提取更多信息,从而实现目标识别,目标分类,目标跟踪等功能。但相比摄像头获取的2D视觉信息,3D点云要处理的数据量更大,对AI算法和计算平台提出了更高的挑战。 雪湖科技3D激光点云AI感知模块是全球首个对3D激光点云做直接AI运算的模块,支持目标识别、目标分类、运动方向侦测、车道线识别、障碍物跟踪等功能。模块解决了高线束激光雷达的计算瓶颈问题,充分发挥激光雷达的性能。研发和生产该模块的雪湖科技是一家专注于异构加速技术和产品研发的国家高新技术企业,为人工智能、云计算和高性能计算等提供异构加速产品和解决方案。公司于2017年在上海成立,创始团队在异构领域研发经验丰富,公司核心成员来自于华为、美国高通、日本富士通、华勤、中科大、港科大等行业顶尖企业和知名高校。
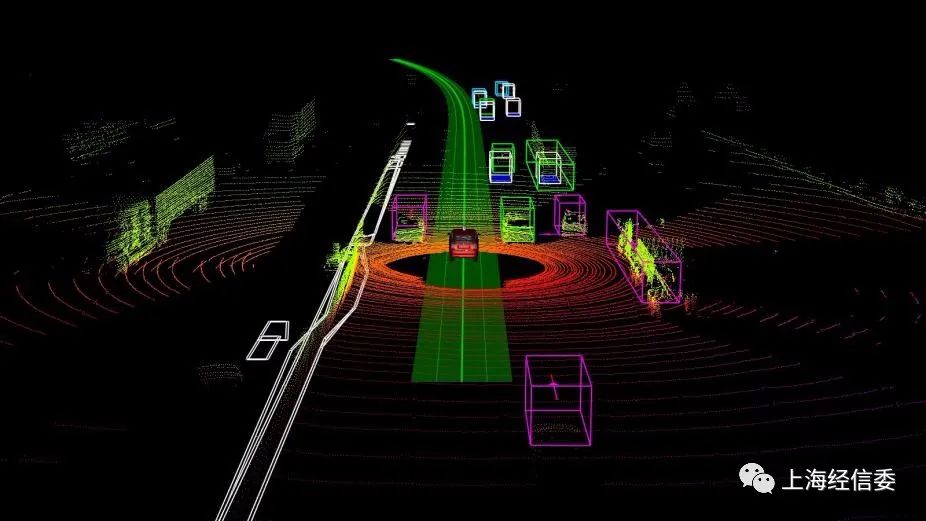
图2. 3D激光点云AI感知
二、创新内容
雪湖科技3D点云AI计算模块融合了异构计算芯片和深度优化的3D点云AI算法,能够在保证点云信息不损失的条件下,对3D点云做高效处理。通过优化芯片架构,实现了针对稀疏点云的高速处理,从而满足各类场景下的帧率要求。
(一)核心技术特性
1.专门针对高线束激光雷达的点云数据设计的处理器架构。由于高线束雷达数据量大,使用传统架构处理点云数据效率低下;
2.实现15FPS以上高速实时处理,速率高、延时低。可以支持 32线以上激光雷达;
3.采用基于体素格的真3D空间卷积算法。算法精度高,鲁棒性好;
4.识别精度高,支持在恶劣天气,光照条件较差的情况下维持较高的识别精度;
5.支持工业级、车规级高可靠性,能够支持在恶劣环境下的边缘计算部署。
(二)技术创新特点
雪湖科技的激光点云AI计算模块拥有以下三个技术创新特点:
1.针对真3D空间卷积硬件加速方案。目前边缘侧的计算平台MCU、GPU、AI芯片都无法支持真3D空间卷积,运行效率低下,无法满足高线束雷达大数据量、低时延的处理要求,误差容忍度高。
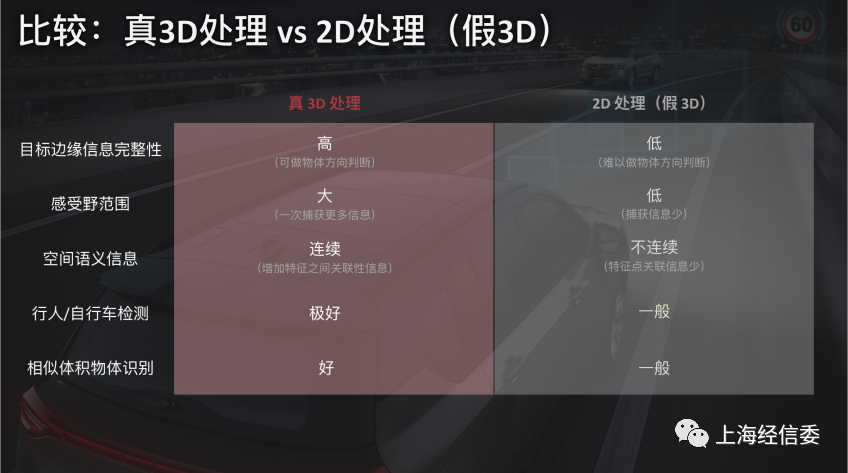
图3. 真 3D 处理与假 3D 处理的区别2.AI算法精度高。目前针对于目标识别有三种主流算法:鸟瞰算法、直接算法、体素格算法。三种算法中,鸟瞰算法精度较低,处理过程中会丢失大量信息;直接算法一般针对低线束雷达数据;雪湖深度优化的体素格算法处理精度较高,能够更好的保留目标物边缘特性,更大程度地感受视野范围和连续的空间语义信息,使得识别目标的精度更高,是非常优秀的高线束雷达数据处理算法。3.可靠行高。具备工业级可靠性。自动驾驶和智慧公路等大部分场景都要求在室外复杂环境下长时间使用,GPU这样的非工业标准计算平台无法满足相关可靠性要求。雪湖科技的AI模块采用车规级单芯片,芯片内采用结构简单可靠性强,且能满足恶劣环境下长时间工作的处理架构,能够达到工业级可靠性要求。(三)技术水平与创新价值雪湖科技已经在环境感知的AI计算模块领域形成产品矩阵,从摄像头输入的视觉感知到激光雷达(LiDAR)的激光点云的产品均有布局。公司累计已申请软著26项和专利4项,2019年用于视觉感知的深度学习计算模块(DCU)亮相工博会,获得由孙家栋院士评选的“工博会创新奖”。
雪湖科技的环境感知AI计算模块也已经进入到各类场景当中,其中视觉感知已经实现了项目落地。随着自动驾驶逐渐落地和新基建下路测设备场景拓展,雪湖用于激光雷达的AI计算模块预计2020年内能够实现落地。
三、应用情况
雪湖科技的激光雷达AI计算模块主要针对下列场景。
自动驾驶:通过激光点云实现高精度环境感知;
智慧城市:用于路侧车路协同设备,安防监控上的道路监控,轨道异物侵入监控等场景;
无人机/机器人:用于环境感知,危险判断,场景重建等场景。
雪湖科技发现激光雷达是优于摄像头视觉的环境感知传感器。但可惜的是,受制于算力瓶颈,应用端会把3D点云信息转化成2D后再做处理。这样一来,丢失了大量激光雷达原有信息,让激光雷达跟摄像头相比的优势荡然无存。比如,目标边缘信息更完整的情况下,可以对目标物体的方向做出判断(如车头车尾),进而可以对目标移动方向做出推测和有效跟踪。雪湖科技通过基于体素格的真3D空间卷积算法和异构并行计算,直接对激光点云做3D空间卷积,能够实时处理、同步输出、跟踪及区域行驶检测,并能够保证良好的计算性能和超低延时,满足高等级自动驾驶和智慧城市等对于边缘计算的高实时性要求。因此该模块还可以被应用于无人机巡检,城市轨道交通,安防监控等各种领域,市场前景广阔、潜力巨大。
四、专家点评
“雪湖科技团队在人工智能和异构加速领域拥有丰富的实践经验,很欣喜的看到他们基于3D激光点云的 AI计算模块问世。雪湖的AI计算模块基于高线数激光雷达特性,利用高清晰点云数据像传统图像视频一样识别行人,自行车,车辆等物体,甚至车牌和文字,让激光雷达在高等级自动驾驶和智慧城市等诸多场景中的应用扩展更加容易。”
——美国数字激光雷达厂商 Ouster 市场专家 Barry Bai
五、媒体报道
“国内专注于异构加速技术研发的雪湖科技已率先宣布搭载其深度学习计算单元(DCU: Deep learning Computing Unit)的AI边缘计算卡支持全新的 YoloV4 目标检测算法,并在下月开始提供样品。”
——中国青年网 2020年4月30日
责任编辑:lq
-
电源技术创新设计专辑2012-08-17 0
-
这些所谓的手机技术创新,你会买账吗?2016-10-18 0
-
电源芯片技术的创新2017-06-23 0
-
云计算未来的三个预测2017-07-05 0
-
阿里云启动API创新大赛 设视频技术为场景赛题2018-01-09 0
-
云计算技术特点2018-03-20 0
-
云计算环境下,UPS电源市场将发生巨大变化2018-08-20 0
-
罗姆超低功耗降压型电源IC荣获中国IoT杰出技术创新奖!2019-07-11 0
-
2020年5G技术创新研讨会 线上直播2020-01-14 0
-
请问技术创新是如何推动设计工艺发展的?2021-04-21 0
-
模板制造的三个主要技术是什么?有什么特点?2021-04-25 0
-
激光雷达点云数据分割算法的嵌入式平台上的部署实现2021-12-21 0
-
DC电源模块的设计与制造技术创新2023-12-15 280
全部0条评论

快来发表一下你的评论吧 !
