

伺服全闭环控制模式的注意事项
电子说
1.2w人已加入
描述
概要:
在自动控制系统中我们常听的控制系统有开环控制系统和闭环系统还有半闭环控制系统,那么今天就聊一下全闭环控制系统。所谓的全闭环控制,就是使用外置的外部反馈尺直接检测出控制对象的位置进行反馈并进行位 置控制,这样可以使控制不受丝杆的误差以及温度引起的位置变化的影响。
位置偏差计数清零、指令脉冲输入禁止、指令分倍频功能、位置指令滤波器、制振控制的清零、控制 模式切换等,有可能会导致位置信息丢失,在重新启动需要位置管理的动作时,必须进行原点复位。
全闭环注意事项
(1)请在外部反馈尺的基准下输入指令脉冲。 。 指令脉冲和外部反馈尺的脉冲不一致时,请使用指令分倍频功能,设定分倍频后的 指令脉冲以达到外部反馈尺为基准。
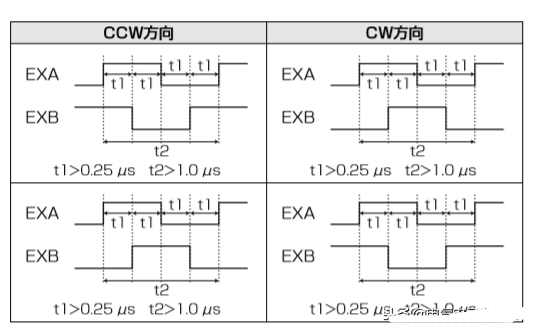
(2)使用AB相输出型的反馈尺时,电机物理性的旋转方向(CW/CCW)和外部反馈尺的A相、B相按照下述 进行表示连接。
外部反馈尺相关参数设定的方法
1)确认配线后通电。
2)确认前面板的反馈脉冲总和和外部反馈尺反馈脉冲总和的初始值。
3)移动工件,确认与步骤 ,所读到的初始值之间的移动量。
4)反馈脉冲总和和外部反馈尺反馈脉冲总和的移动量正负相反时,将外部反馈尺方向反转 5)计算公式
编码器位置和外部反馈尺位置的差值,作为混合偏差在驱动器内部计算。
责任编辑人:CC
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
闭环控制步进电机对比传统开环控制的优点2022-11-12 0
-
自动调平的闭环控制。#闭环控制学习电子知识 2022-10-06
-
步进电机的全闭环控制系统2016-01-11 0
-
拓达伺服步进电机位置闭环控制2018-08-25 0
-
步进电机全闭环控制系统2019-06-24 0
-
什么是控制什么是闭环控制2021-09-13 0
-
三菱伺服电机马达使用/安装注意事项?2021-09-28 0
-
松下伺服EtherCAT通信注意事项有哪些?2021-11-15 0
-
什么是闭环控制2010-03-12 2066
-
工业机器人伺服的控制模式分析2017-10-09 987
-
伺服驱动器控制模式的接线及其注意事项2020-11-20 18827
-
伺服电机闭环控制和开环控制的区别2021-08-02 12178
-
传统步进电机转型闭环控制2021-09-10 7632
-
COFT控制模式的Buck LED驱动芯片中 COFF的配置和注意事项2022-10-28 390
-
伺服电机常见故障维修及注意事项2023-11-28 1107
全部0条评论

快来发表一下你的评论吧 !
