

基于PLC可编程控制器实现涡流检测装置的功能设计
描述
1 引 言
目前国外的无损检测技术正在从NDE向ANDE和QNDE发展,也就是说从一般的无损检测技术向自动无损检测和定量无损检测技术发展。加速检测过程、实现产品的连续在线检测,这对我国无损检测技术有着启发的作用。涡流探伤检查在国内越来越受到重视,因此,各种涡流检测装置也得到广泛应用。然而这类检测装置要求性能稳定,可靠性高,自动化程度高,为此需要一个合理的控制系统来满足其要求。
本文采用PLC对涡流检测装置进行自动化控制,经过试验,其整体性能稳定可靠,运动模拟量精确,操作方便,目前该检测装置交付公司使用,有效提高了检测性能,有利于类似检测装置的开发设计。
2 涡流检测装置简介
国内外一些学者经过多年努力,通过对轴裂纹的理论研究模拟实验,研制出了各类用于轴类涡流检测的仪器及系统,用以早期发现轴裂纹的存在并监视其扩展情况,但目前对涡流检测技术的研究主要集中在涡流检测理论的研究、高性能探头的设计和缺陷识别与成像方法的研究等几个方面。在实际应用,特别是对大规模产品自动化检测的检测装置开发还有待于进一步的提高。
为此,本文提出了基于PLC控制的涡流检测装置的研制,并将其应用到汽车轮毂等转轴的检测中,取得了很好的效果。其中,使用了美国ZETEC公司的信号处理器,便于安装其他探头来检测其他缺陷,提高检测装置多功能测试。
本检测装置以转轴涡流检测为目标,完成示意结构如图1所示的涡流检测装置:他主要由控制系统、打标装置、工件抓取和夹紧装置、检测装置和信号处理器组成。
该涡流检测装置流程图如图2所示:在保证电源和气源的前提下,标准工件正确装载,调整开关至参数设置状态;手动启动按钮后气爪手指夹住标准件;旋转机构中的步进电机通过传动装置带动工件转动并保持其恒定转速;检测调节装置中的探头推至工件表面并保持检测距离;检
测完毕后主机读取数据和保存初始化设置;探头返回初始位置;电机停止转动。待标准工件完全停止转动后气爪手指松开,取出标准工件和准备工件测试阶段。
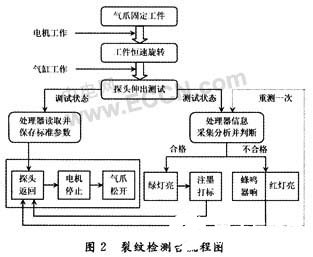
调整开关至测试状态,手动启动按钮,气爪夹住工件,旋转机构带动工件恒速转动,探头推出开始测量工件。经过处理器的判断后将检测结果反馈给PLC。若工件合格,合格指示灯亮,PLC控制步进电机停止工作。待工件停止旋转时,打标系统的打标喷头快速在工件特定位置打上合格标记。气爪手指松开工件,进入下一个工件检测。若工件不合格,不合格指示灯亮和发出蜂鸣报警,探头返回初始位置后再推至工件表面重新检测,有效防止因工件表面还有杂质而误判。检测完毕后若工件合格,合格灯亮,蜂鸣停止报警,打标系统打标,其中注墨装置在打标几次后自动工作,保证喷头有源源不断的墨水供应;若不合格,不合格灯和蜂鸣报警继续工作,打标系统不工作。气爪手指松开工件。若取出工件是合格品,人工将其取下安放到合格品指定位置,否则将其放到不合格品通道。不合格品通道安装有传感器,当有工件通过后,不合格灯和蜂鸣报警停止工作,此时不合格品已经进入不合格品安放处,否则不能进入下一次检测,这将有效防止不合格品安放到合格品安放处。
3 PLC控制系统
传统的电器控制是采用继电器控制,继电器硬件接线电路是逻辑、顺序控制,体积大,连线复杂,当更改执行程序时修改困难,有触点系统,寿命短,可靠性和可维护性都较差。基于继电器控制的这些缺点,目前有被PLC取代的趋势。
PLC可编程控制器具有较强的抗干扰能力,他能在0~55℃温度范围内正常工作,可以承受峰值1000 V,脉宽1Ls的矩形脉冲列的尖峰干扰,而且其微处理器与I/O回路之间采用了光电隔离技术,有效地隔离了输入与输出之间的电的联系,具有较高的可靠性。“可编程控制器接线简单,硬件安装方便,开发柔性好”。而且,在PLC的输入、输出口安装有多孔插接板,通过香蕉插脚,实现外电路和PIC的快速连接。同时,气动元件也可以用香蕉插脚在不变形的多孔均布的安装平台上快速安装及拆卸。所以,当实验项目变更时,无须改变硬件设备就能快速组合成相应的气路和电路,装卸调试方便、灵活、快捷。对于设备的更新,只需改变PIC应用软件程序,比如在微机上设计绘制相应的梯形图,就可自动生成应用软件程序,并通过专用电缆将程序传输给可编程序控制器运行,实现对相应气动系统的控制,不仅能快捷完成全气控气动回路而且对于电控气动系统方便快速地进行电路和气路设计组装、调试和实验。本检测装置通过PIC也有效控制步进电机的工作。
在该检测装置中,()MR()N公司的微型PLC作为控制的核心,实现了如图3所示的控制系统,完成对步进电机驱动器、各种电磁阀及其信号接收等控制。PLC控制气爪抓住或松开工件,控制气缸将传感器推到指定位置和返回初始位置,控制步进电机以一定速度旋转和停止,能给处理器一个测试使能信号,接收处理器的反馈信号(合格或不合格信号),根据所得的信号控制信号灯亮,根据检测结果控制打标系统和蜂鸣器报警。
![]()
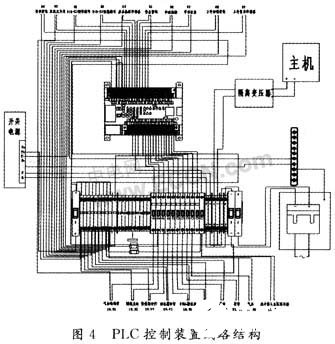
图4给出了PLC控制该装置的线路图,实现了PLC的供电方式及PLC与其他各个部位的连接。同时为了更好地实现与外部的线路连接,端子排起了一定作用。并且预留一定的接口数量以备后用。
3.1 步进电机的PLC控制过程
该检测装置使用步进电机作为工件转动动力源,他具备快速启停功能,能在大批量产品检测中提高工效。
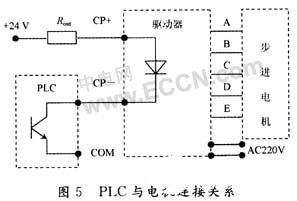
步进电机是一种将输入脉冲信号转换成相应角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变换的影响,即给电机加一个脉冲信号,电机转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点,保证了该检测装置工件在测试时转速保持恒定。他还有一个优点是容易由PLC控制。本检测装置中,PLC通过步进电机驱动器输出脉冲信号CP,CP的频率和步进电机的转速成正比,cP的个数决定了步进电机旋转的角度。驱动器输入输出信号全部光电隔离,需要满足以下公式。

其中,Vout,Iout为外部输入电压与电流;Rout为外部电阻,Rin为内部电阻。
由式(1)可知外部需串连的电阻值为:

则在外面串连一个电阻Rout,如图5所示,PLC与步进电机有效地完成控制。
带三极管输出的CPM1A PCs具有输出频率范围为20 Hz~2 kHz(单相)的脉冲输出功能。IR 01000或IR01001均可选择作脉冲输出,且脉冲输出既可设置为在连续模式下,可以通过一条指令来停止脉冲输出;又在独立模式下,脉冲输出在输出完预设定的脉冲个数后停止。
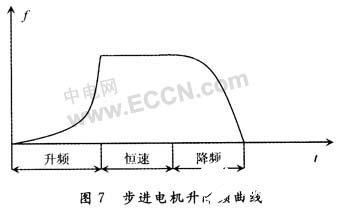
步进电机脉冲控制梯形图如图6所示。
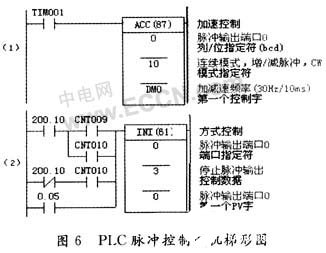
图6中梯形图(1)表示图7中的升频,梯形图(2)表示降频。在启动时,静态惯性很大,以较小加速度升频,运动惯量逐渐增大后,可以较大加速度升频。降频时为反指数曲线。在梯形图中升频使用了积分,降频使用了微分。
3.2 气动系统的PLC控制
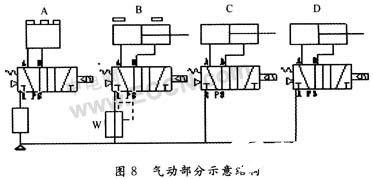
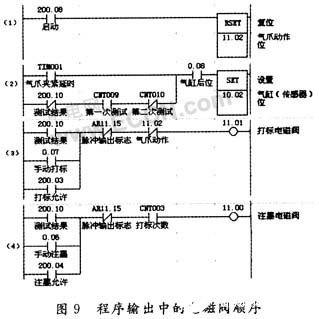
本检测装置采用了4个两位五通的电磁阀,分别连接气爪A、探头用气缸B、注墨用气缸C和打标用气缸D,同时气缸B具有磁性开关和减压阀,便于PLC控制与气压调节,气爪A与电磁阀之间连接有旋转分气块,保证与气爪相连的气管始终保持相对静止状态。图8为气动系统分布示意图,工作顺序关系为A-B-C-D。PLC通过电磁阀控制他们的工作顺序。 图9为PLC控制电磁阀结构,他能有效协调各部分连贯运动。
4 结 语
该检测装置利用PLC集合了电气控制、气动技术、机械制造于一体,提高了工件检测功能和自动化程度。基于PLC控制的检测装置已经得到了实际应用,并取得了很好的检测效果。同时他操作方便、安全可靠、成本低,具有一定实用和推广价值。
责任编辑:gt
-
可编程控制器的使用实验2008-09-25 0
-
PLC可编程控制器教材2012-08-12 0
-
北京三菱plc可编程控制器回收上门回收2021-08-09 0
-
PLC可编程控制器、变频调速综合实验装置(网络型)精选资料分享2021-09-08 0
-
三菱PLC可编程控制器教材2006-04-07 759
-
可编程控制器原理及应用 PPT2008-12-30 961
-
可编程控制器(PLC)2008-11-20 2262
-
用可编程控制器PLC实现模糊控制的方法研究_刘晓霞2017-02-07 703
-
可编程控制器基本知识_可编程控制器原理及应用2018-04-25 56542
-
如何使用可编程控制器替代继电器2020-06-13 4575
-
可编程控制器PLC概述2023-04-19 386
-
可编程控制器的组成 可编程控制器有哪些特点?2024-01-18 455
全部0条评论

快来发表一下你的评论吧 !
