

利用多传感器实现车载近景三维的高精度测量系统的要求设计
描述
城市三维空间信息的获取是“数字城市”的基本工程,它具有位置性、多维性和时序性等特点,是“数字城市”中融合其他各种信息、形成在空间和时间上连续分布的城市综合信息的基础,这就决定了所获取的城市三维空间信息应具有一定的位置精度、时间精度以及完整的空间坐标描述形式,而过去只依赖于某种特定传感器的三维信息相对于这些要求就具有很大的局限性。因此,当前城市三维空间信息的获取的趋势是由利用单个特定传感器获取单一数据信息,向利用多个传感器获取多方面数据信息发展,将多种类型的传感器进行优化配置信息互补,从而使得系统的精度得到很大提高。这就涉及到如何对多种传感器进行信息获取和信息融合的问题。
多传感器数据融合处理的前提条件是从每个传感器获得的信息必须是在同一个空间的同一时刻的描述。这就包括2个方面:首先,要保证每个传感器得到的信息是在同一坐标系下的描述,称之为空间配准;其次,要保证各传感器之间的数据应该在时间上对齐,称之为时间配准,是上面所提到多传感器融合中空间配准的关键,在车载式三维采集系统的动态工作环境下,时间对准问题表现得尤为突出。
因此,多传感器信息的空间配准和时间配准成为城市三维空间信息融合中首先需要实现的关键技术。本课题系统集成了新近发展的多种传感器,包括3台Novetel GPS DL-4 OEM接收机、Riegl公司的LMS-Q140i-80激光扫描仪等,可以实时完成载体(车)的GPS定位数据、建筑物激光扫描数据等数据信息的采集及精确的空间和时间上的配准,从而实现有效的多传感器信息融合。
1 多传感器空间配准
对于车载近景三维测量系统,每个传感器得到的信息都是部分城市三维空间信息在该传感器空间(坐标系)中的描述。由于各传感器物理特性和空间位置上的差异,造成这些信息的描述空间(坐标系)各不相同,因此,很难对这样的信息进行融合处理。为了保证城市三维信息融合处理的顺利进行,必须在融合前对这些信息进行适当的处理,将这些传感器的数据信息映射到一个共同的参考描述空间(参考坐标系)中,然后,进行融合处理,最后,得到城市三维信息在该空间(参考坐标系)上的一致描述。这就需要空间配准,也就是得到多传感器局部坐标系和全局参考坐标系间的转换关系,在本课题里选择的全局参考坐标系就是西安80坐标系。从数学的角度来看,不同的传感器的测量值组成一个测量子空间,而信息融合则是各测量子空间按照一定的法则向融合信息空间投影,这里的测量子空间就是在各个传感器的局部坐标系下。
为了进行空间配准,从而实现该课题中激光扫描仪(LMS)数据与GPS数据的有效融合,本文引人了激光扫描仪坐标系统、激光扫描仪直角坐标系统、平台坐标系统和基准参考坐标系统(西安80坐标系)。
1.1 各坐标系统定义
1) 激光扫描仪极坐标系统
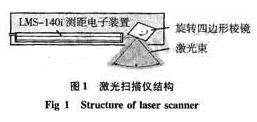
Riegl公司的LMS-Q140i-80激光扫描仪的扫描角度范围为±40°,图1给出了该扫描仪的扫描示意图,建立一个激光扫描仪的局部极坐标系统(ρ,θ),极轴为圆柱体轴线方向,极角θ为扫描仪扫描方向与极轴之间的夹角。
2) 激光扫描仪直角坐标系统
激光扫描仪直角坐标系统(XL,YL,ZL)的原点OL与激光扫描仪极坐标系统的原点重合,ZL与极轴平行,方向向上,YL方向为车行方向,XL-OL-ZL平面与极平面重合,3轴构成右手坐标系。
3) 平台坐标系统
引入平台坐标系统的目的是将3个GPS天线位置数据转换为平台的姿态。如图2,平台坐标系统原点OG位于GPS1天线相位中心,XG轴为GPS2和GPS3相位中心连线的方向,且位于GPS1,GPS2和GPS3天线相位中心连线构成的平面内,YG轴也位于该平面内,ZG轴垂直于此平面向上,构成右手坐标系。
4) 基准参考系统(西安80坐标系)
X轴沿O所在的经纬度线指向东,轴沿O所在经纬度指向北,z轴指向天顶,X,Y,Z指向天顶。
1.2 各坐标系统间转换
1) 扫描仪极坐标系统向扫描仪直角坐标系统转换
扫描仪极坐标系统的极点与扫描仪坐标系统的原点重合,极轴与ZL轴重合,但方向相反,极平面与XL-OL-ZK平面重合,两坐标系统转换关系可表示为

式中ρ,θ为扫描点在扫描仪极坐标系统下坐标值;XL,YL,ZL为扫描点在扫描仪坐标系统下坐标值。
2) 扫描仪坐标系统向平台坐标系统转换
扫描仪坐标系统OL-XLYLZL向平台坐标系统OG-XGYGZG转换可用一般的2个空间直角坐标系转换公式表达
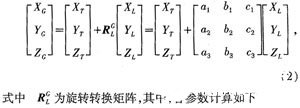

XT,YT,ZT,φ,ω和k为两坐标系统间的6个转换参数,转换参数可通过外业测量加以标定。
3) 平台坐标系统到西安80坐标系的转换
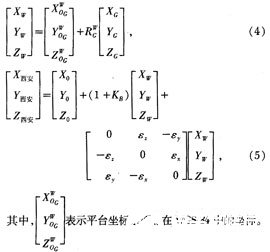
平台坐标系中的坐标可通过3次坐标轴旋转和平移转换到WGS-84坐标系中。其中,3个旋转角和平移向量可由3台GPS在WGS-84中的定位坐标得到,可以求出方向余弦阵RWG(方法与式(3)同),然后,采用参数化方法将WGS-84坐标系转换到西安80坐标系,即
2 多传感器时间配准
选购的奥地利RIEGL公司的LMS-Q140i-80型激光扫描仪,这是一种二维激光扫描仪,进行“铅垂面”扫描,扫描角度为±40°内,最大扫描速度为40线,也就是说每隔25 ms会获取一条扫描线的距离信息,输出的每条扫描线的信息中包括时间信息。
本系统选用NovAtel DL-4-L1/L2型GPS接收机,原始数据输出频率和位置输出频率为20 Hz,也就是为隔50 ms获取一次定位数据信息,具有时间打标功能。为了使激光扫描仪数据和GPS数据在时间上配准起来,在启动激光扫描仪的同时对GPS数据进行时间打标,在后期处理中就可以解算出GPS时间打标信息用于两传感器的时间配准。图3是本文研究多传感器时间配准的结构图。
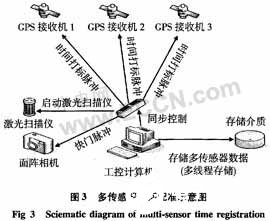
所谓时间配准,一方面通过硬件手段使得各传感器数据在开始的时间上对齐,如上所述;另一方面,就是对各传感器所采集的采样频率不同的目标观测数据进行内差、外推,将大粒度的观测时间点上的数据推算融合到小粒度的观测时间点上。在这里,时间配准的意义在将每个采样时刻由3台GPS获取的平台姿态信息和扫描仪获取的空间信息融合起来。
在本研究中,GPS数据输出频率为△t1=50 ms,激光扫描仪数据输出频率为△t2=25ms,这样,就需要对GPS数据进行线性内插,使得设该车载三维测量系统的数据输出间隔为△t=△t2,则对第n个时刻的激光扫描仪坐标转换到WGS-84坐标系

3 实验结果
该实验在山东科技大学北门进行,载体速度适当,路面比较平坦。首先,利用全站仪精确量测标志点(AA6和AA7)的坐标,结果见表1。然后,再利用该车载三维测量系统对相同的标志点进行了测量,得到相应的测量结果和与标准值(全站仪获取坐标)之间的误差值,见表2。建筑物立面上特征点如图4所示。
4 结论
从上面的实验结果(表2)可以看出:AA6点X,Y和Z方向的误差绝对值分别为0.056,0.030,0.039 m,AA7点X,Y和Z方向的误差绝对值比较大,分别为0.082,0.088,0.067m,但精度也在厘米级别,表明该车载三维测量系统定位精度比较高,证实了该系统多传感器的空间配准和时间配准方案是切实可行的,满足了该系统精度的要求。
责任编辑:gt
-
微米传感器是属于高精度的传感器吗?可测量的最大精度是多少?2015-07-19 0
-
三维角度传感器2015-08-10 0
-
ZLDS200 2D传感器扫描得到的测量数据,可以做出三维轮廓坐标图及三维轮廓模拟图吗?2015-12-23 0
-
高精度三维运动平台可以应用到哪些场合?2015-12-28 0
-
指北倾角传感器2016-11-08 0
-
创新的三维传感汽车控制功能2017-05-15 0
-
三维快速建模技术与三维扫描建模的应用2018-08-07 0
-
高精度悬浮轴振动测量传感器设计2018-11-01 0
-
SOPC和ZigBee的三维移动天线平台该怎么设计?2019-08-29 0
-
测力传感器精度要求2019-12-27 0
-
三维移动天线平台的多平台组合控制怎么实现?2020-04-21 0
-
寻找一个 空间三维坐标测量 传感器2020-12-15 0
-
如何利用双轴加速传感器ADXL202实现高精度角度测量?2021-05-11 0
-
手机核心部件3D高精度检测解决方案2021-12-22 0
-
通常用什么传感器来实现无接触式的高精度距离测量?2023-10-13 0
全部0条评论

快来发表一下你的评论吧 !
