

关于任意多相机系统的SLAM重设计
描述
在SLAM系统中增加更多的相机可以提高鲁棒性和准确性,但会使视觉前端的设计变得非常复杂。因此,文献中的大多数系统是为特定的相机配置定制的。在这项工作中,我们的目标是一个适用于任意多相机设置的自适应SLAM系统。为此,我们重温了可视化SLAM中的几个常见构建块。特别是,我们提出了一个自适应初始化方案,一个传感器无关的信息论的关键帧选择算法,和一个可扩展的基于体素的地图。这些技术对实际的相机设置做了很少的假设,并且更喜欢基于理论的方法而不是启发式方法。通过这些修改,我们采用了最先进的视觉里程计,实验结果表明,修改后的流水线可以适应各种各样的摄像机设置(例如,一个实验中有2到6个摄像机),而不需要传感器特定的修改或调整。
贡献
自适应初始化方案。
与传感器无关的信息论关键帧选择算法。
可扩展的基于体素的地图管理方法。
多相机系统在感知算法方面实现了卓越的性能,并被广泛应用于现实世界的应用中,如全向测绘、自主无人机和虚拟现实耳机。为了便于在SLAM中使用这种系统,我们提出了几个通用设计来自动适应任意多相机系统。
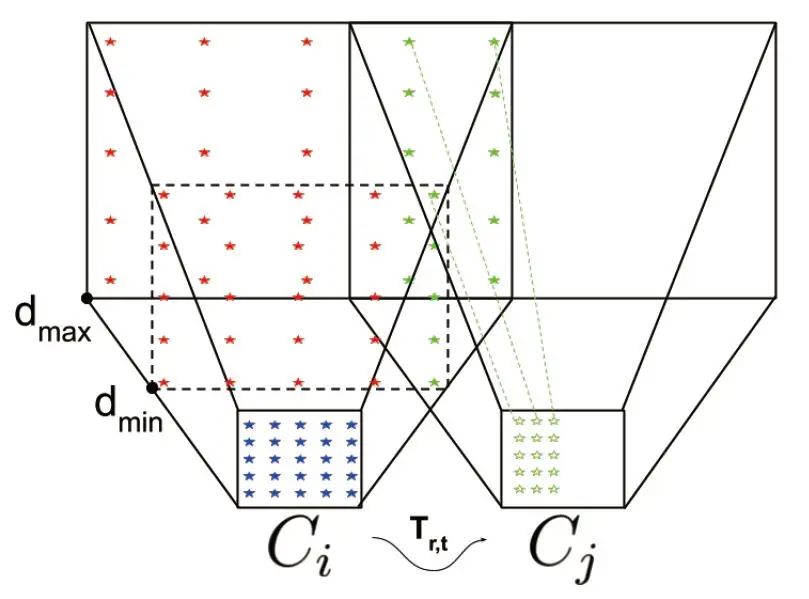
图2 两个摄像机之间立体重叠检查的图示,Ci和Cj。蓝星是相机I像面上的采样点,绿星是成功投影到相机j的3D点,红星是从像面上掉下来的点。
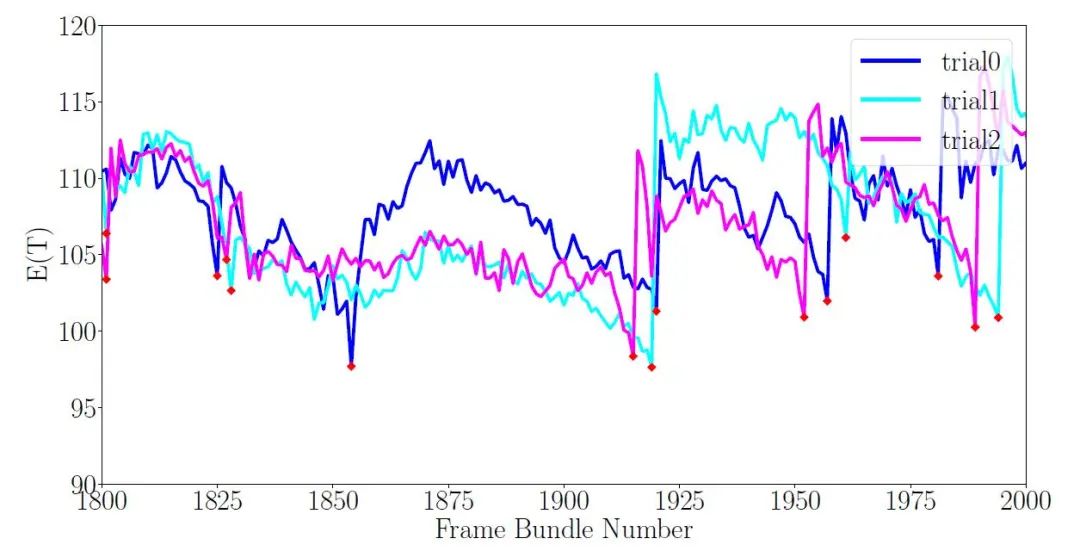
图3 EuRoC MH 01中3次运行的负熵演化。每次运行的E(T)以不同的颜色显示,红点表示某帧被选为关键帧的位置。插入关键帧后,E(T)增加,随着传感器远离地图,e(T)减少。
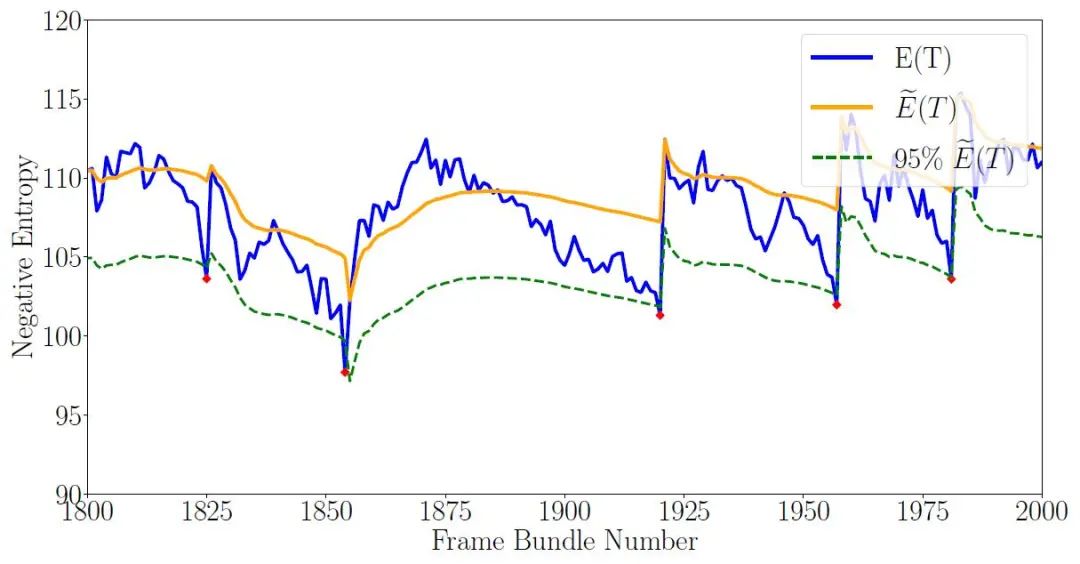
图4 运行平均E(T)和关键帧选择。运行平均过滤器(黄色)跟踪自最后一个关键帧以来的定位质量。当当前帧的负熵(蓝色)低于运行平均值的某个百分比(绿色虚线)时,将选择一个新的关键帧(红点),并重置运行平均值过滤器。
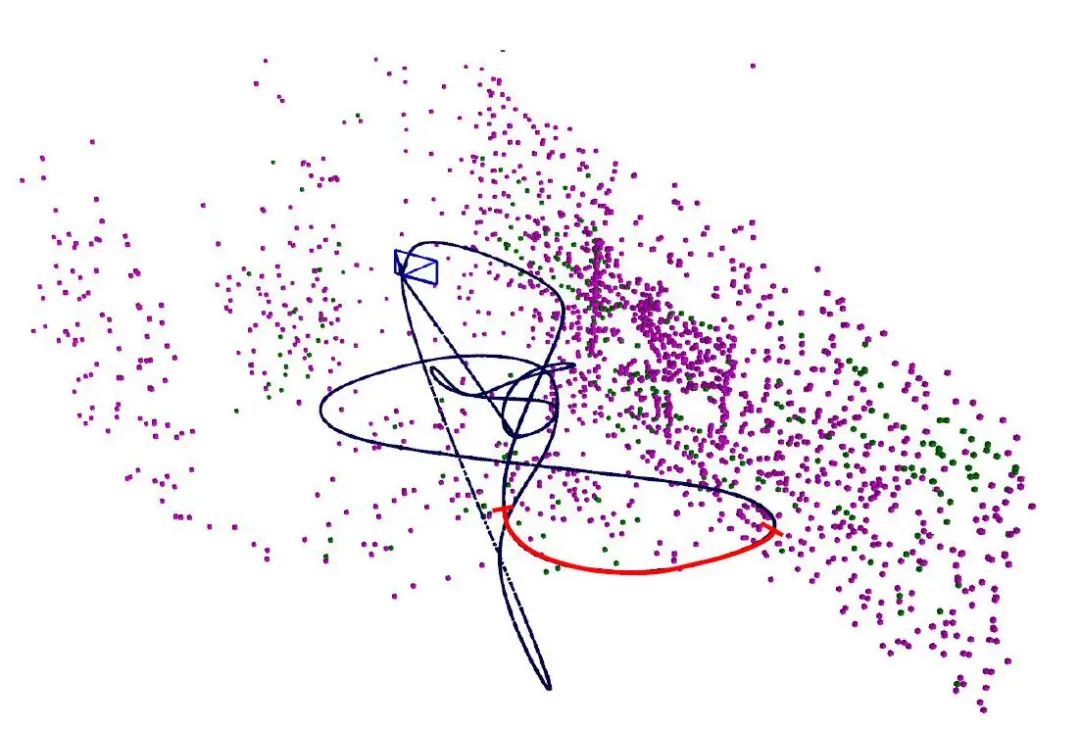
图5 模拟环境中的模拟图8轨迹。该轨迹是通过用5个摄像机运行调整后的VIO管道来估计的。单目设置丢失轨迹的部分用红色标记。品红色点是SLAM系统跟踪的地标。
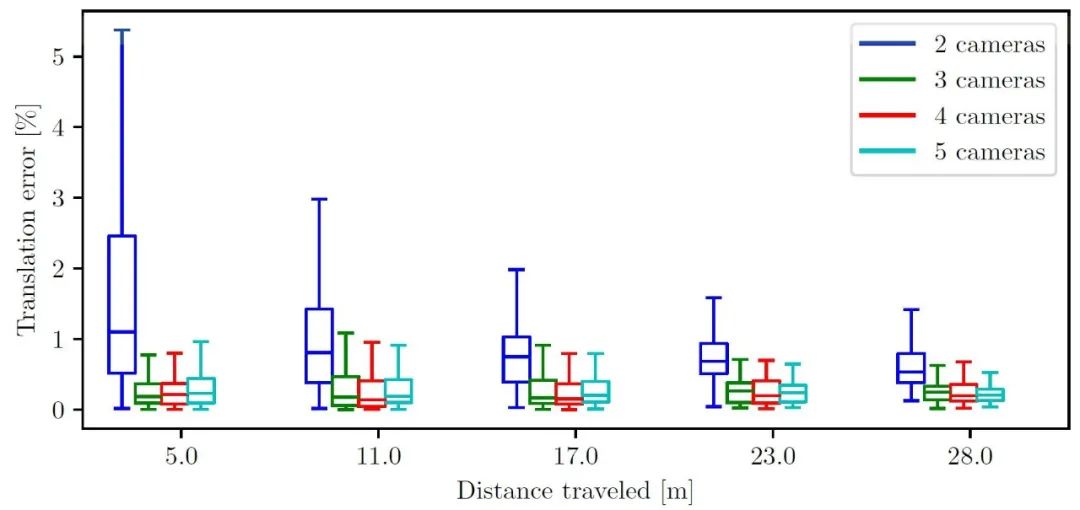
图6 5次运行模拟中的总体相对平移误差。
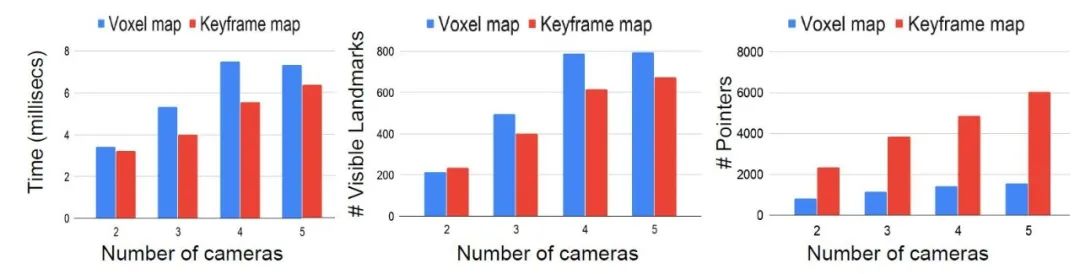
图7 针对不同的相机配置(2到5个摄像机),将建议的体素图与标准关键帧进行比较。左:VIO前端总时间。中间:从地图中检索匹配的地标。右侧:指向地标位置的引用/指针的数量。

图8 含BA的EuRoC数据集的相对平移误差百分比。
表1 EuRoC数据集的RMSE中值(米)超过5次。以粗体突出显示的最低误差。

表2 EuRoC序列中5次运行的关键帧平均数。

图3 单目和立体设置的不同关键帧选择标准的关键帧平均数。
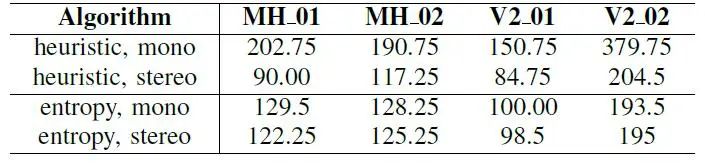
表4 科学园日序列中多相机管道的不同轨迹误差度量。第一行包含完整轨迹的绝对RMSE(547.488米)

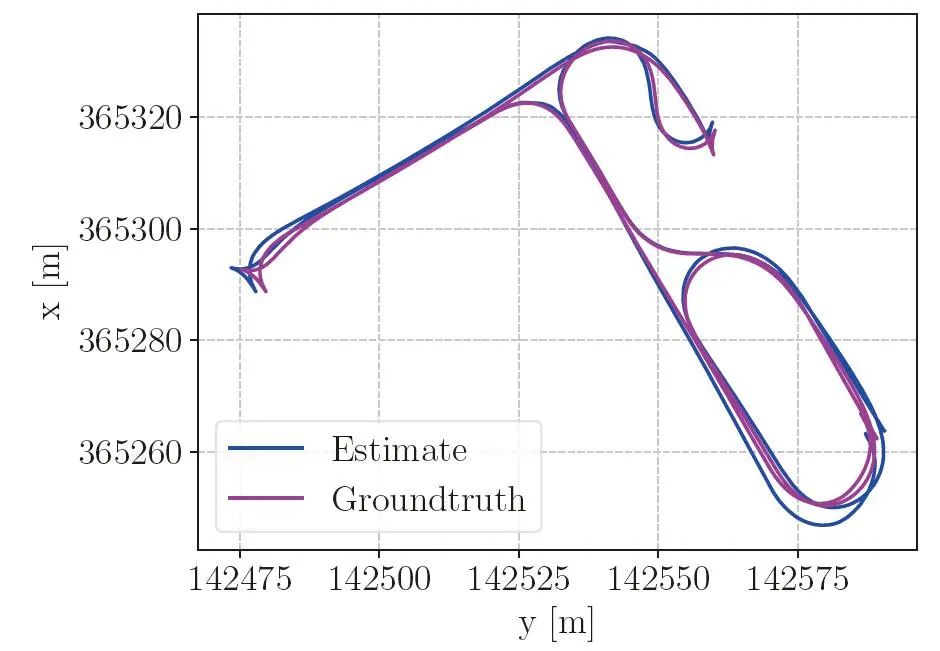
图9 科学园日序列中FRB配置的估计轨迹和基本轨迹的俯视图。
原文标题:任意多相机系统的SLAM重设计
文章出处:【微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
SLAM技术的应用及发展现状2018-12-06 0
-
激光SLAM与视觉SLAM有什么区别?2021-07-05 0
-
激光SLAM技术在机器人运动控制系统中的应用是什么2021-07-30 0
-
请问如何理解SLAM用到的传感器轮式里程计IMU、雷达、相机的工作原理?2021-10-09 0
-
HOOFR-SLAM的系统框架及其特征提取2021-12-21 0
-
单目视觉SLAM仿真系统的设计与实现2009-04-15 977
-
关于使用多相降压转换器的好处2017-09-15 617
-
机器人SLAM实现2018-03-26 570
-
多相机视觉系统的坐标系统标定与统一及其应用2019-06-20 11346
-
超全SLAM技术及应用介绍2019-11-22 17102
-
基于多相机捕捉系统下的通用物体运动捕捉方法2021-06-25 495
-
关于视觉SLAM直接法的介绍2022-11-30 802
-
基于深度学习的视觉SLAM综述2022-12-02 1266
-
一文解析多相机视觉系统的难点及应用2023-02-03 658
-
从基本原理到应用的SLAM技术深度解析2024-02-26 3113
全部0条评论

快来发表一下你的评论吧 !
