

如何通过IPC通信玩转传感器数据?
描述
1、rt-smart的第一个应用程序,imx6ull用户态点灯
简介
首先纠正一下上一篇文章中,在我的仓库中,1月11日的代码会出现系统崩溃。原因在于我的驱动中内存物理地址映射到虚拟地址的操作有问题,我已经把这个bug解决了,如果有兴趣,欢迎拉取最新的代码。
这一篇来介绍我在rt-smart的第二个应用。这个应用将加入rt-smart与rt-thread区别之处--进程间的通信。
功能主要是在用户态读取传感器数据,传感器是100ASK_imx6ull板载的ap3216c,它是采用I2C总线进行通信。
为啥这次会先对接I2C呢?因为接下来想把屏幕在rt-smart跑起来,但是屏幕的触摸芯片采用I2C,所以就把他先跑起来。
目前屏幕已经在rt-thread上跑起来,但是在rt-smart没有跑起来,目前在研究LCD的缓存是一个什么样一个形式。
100ask_imx6ull驱动对接情况:
rt-threadrt-smart
GPIO√√
I2C√√
lcd√×
100ask_imx6ull的rtt仓库:
rt-thread的仓库:https://gitee.com/RiceChen0/imx6ull_rt_rthread
rt-smart的厂库:https://gitee.com/RiceChen0/imx6ull_rt_smart
环境
100ask_imx6ull开发板。
两条micro USB线。
电源。
windows电脑一台。
I2C驱动适配
在imx6ull中,我适配的是硬件I2C,imx6ull有4组I2C接口。软件I2C后续不会进行适配,因为在这颗芯片上,软件I2C的必要性不大。
如果你要了解RT-Thread的I2C设备驱动框架,可以看一下我之前的文章《rt-thread驱动框架分析》-i2c驱动
在上一篇文章中《rt-smart的第一个应用程序,imx6ull用户态点灯》讲到,rt-smart不能直接使用物理地址访问硬件,而需要采用虚拟地址。所以需要进行地址映射(rtt提供的API:rt_hw_kernel_phys_to_virt)。
首先需要查看imx6ull的芯片手册,需要将I2C相关的物理地址找到。为了不要重复造轮子,定义了一个结构体:struct i2c_addr_config,并把4组I2C相关的地址作为一个表格。如下:
#define I2C1_SCL_MUX_BASE 0x020E00B4U
#define I2C2_SCL_MUX_BASE 0x020E00BCU
#define I2C3_SCL_MUX_BASE 0x020E00E4U
#define I2C4_SCL_MUX_BASE 0x020E00ECU
#define I2C1_SCL_CFG_BASE 0x020E0340U
#define I2C2_SCL_CFG_BASE 0x020E0348U
#define I2C3_SCL_CFG_BASE 0x020E0370U
#define I2C4_SCL_CFG_BASE 0x020E0378U
#define I2C1_SCL_INPUT_BASE 0x020E05A4U
#define I2C2_SCL_INPUT_BASE 0x020E05ACU
#define I2C3_SCL_INPUT_BASE 0x020E05B4U
#define I2C4_SCL_INPUT_BASE 0x020E05BCU
#define I2C1_SDA_MUX_BASE 0x020E00B8U
#define I2C2_SDA_MUX_BASE 0x020E00C0U
#define I2C3_SDA_MUX_BASE 0x020E00E8U
#define I2C4_SDA_MUX_BASE 0x020E00F0U
#define I2C1_SDA_CFG_BASE 0x020E0344U
#define I2C2_SDA_CFG_BASE 0x020E034CU
#define I2C3_SDA_CFG_BASE 0x020E0374U
#define I2C4_SDA_CFG_BASE 0x020E037CU
#define I2C1_SDA_INPUT_BASE 0x020E05A8U
#define I2C2_SDA_INPUT_BASE 0x020E05B0U
#define I2C3_SDA_INPUT_BASE 0x020E05B8U
#define I2C4_SDA_INPUT_BASE 0x020E05C0U
struct i2c_addr_config
{
I2C_Type *i2c;
size_t i2c_scl_mux_base;
size_t i2c_scl_config_base;
size_t i2c_scl_input_base;
size_t i2c_sda_mux_base;
size_t i2c_sda_config_base;
size_t i2c_sda_input_base
};
static struct i2c_addr_config addr_config[] =
{
{I2C1, I2C1_SCL_MUX_BASE, I2C1_SCL_CFG_BASE, I2C1_SCL_INPUT_BASE, I2C1_SDA_MUX_BASE, I2C1_SDA_CFG_BASE, I2C1_SDA_INPUT_BASE},
{I2C2, I2C2_SCL_MUX_BASE, I2C2_SCL_CFG_BASE, I2C2_SCL_INPUT_BASE, I2C2_SDA_MUX_BASE, I2C2_SDA_CFG_BASE, I2C2_SDA_INPUT_BASE},
{I2C3, I2C3_SCL_MUX_BASE, I2C3_SCL_CFG_BASE, I2C3_SCL_INPUT_BASE, I2C3_SDA_MUX_BASE, I2C3_SDA_CFG_BASE, I2C3_SDA_INPUT_BASE},
{I2C4, I2C4_SCL_MUX_BASE, I2C4_SCL_CFG_BASE, I2C4_SCL_INPUT_BASE, I2C4_SDA_MUX_BASE, I2C4_SDA_CFG_BASE, I2C4_SDA_INPUT_BASE},
};
将物理地址转为虚拟地址,代码如下:
for(i = 0; i 《 sizeof(addr_config) / sizeof(addr_config[0]); i++)
{
addr_config[i].i2c = (I2C_Type *)rt_hw_kernel_phys_to_virt((void*)(addr_config[i].i2c), 0x1000);
addr_config[i].i2c_scl_mux_base = (size_t)rt_hw_kernel_phys_to_virt((void*)(addr_config[i].i2c_scl_mux_base), 0x1000);
addr_config[i].i2c_scl_config_base = (size_t)rt_hw_kernel_phys_to_virt((void*)(addr_config[i].i2c_scl_config_base), 0x1000);
addr_config[i].i2c_scl_input_base = (size_t)rt_hw_kernel_phys_to_virt((void*)(addr_config[i].i2c_scl_input_base), 0x1000);
addr_config[i].i2c_sda_mux_base = (size_t)rt_hw_kernel_phys_to_virt((void*)(addr_config[i].i2c_sda_mux_base), 0x1000);
addr_config[i].i2c_sda_config_base = (size_t)rt_hw_kernel_phys_to_virt((void*)(addr_config[i].i2c_sda_config_base), 0x1000);
addr_config[i].i2c_sda_input_base = (size_t)rt_hw_kernel_phys_to_virt((void*)(addr_config[i].i2c_sda_input_base), 0x1000);
}
在imx6ull中,I2C需要的步骤,引脚初始化为I2C,然后I2C总线初始化便可以了。
目前imx6ull上,rt-thread和rt-smart都适配I2C,所以可以先看一下rt-thread的仓库,然后再看rt-smart的仓库,可能更加理解它的区别。
I2C的应用:
100ask_imx6ull中,板载有ap3216c传感器,挂载在I2C1总线上。而且RT-Thread中有相应的软件包,对接了RT-Thread的传感器设备框架,这给我验证代码提供便携。不过要在用户态中使用该软件包,还需要做一点操作,需要注册该传感器设备。
int ap3216c_test()
{
struct rt_sensor_config cfg;
cfg.intf.dev_name = “i2c1”;
cfg.mode = RT_SENSOR_MODE_POLLING;
rt_hw_ap3216c_init(“ap”, &cfg);
return RT_EOK;
}
INIT_DEVICE_EXPORT(ap3216c_test);
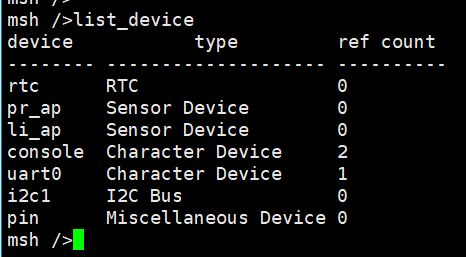
然后编译烧录,通过list_device就可以看到相对应的设备(pr_ap和li_ap),如下:
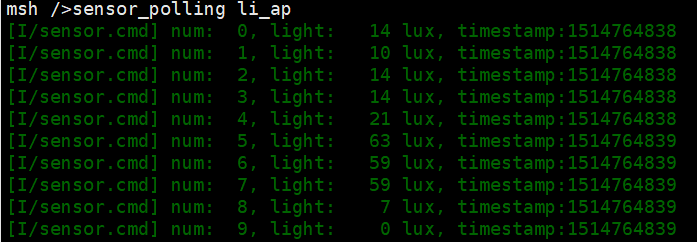
RT_Thread的传感器框架很贴心,提供了测试命令(sensor_polling li_ap),这样就可以初步验证传感器是否正常工作,通过验证,传感器和I2C适配都能正常工作:
上面的验证都是在内核态中测试的,而这篇文章的目的是要在用户态中读取传感器数据,为了进一步了解rt-smart和RT-Thread的区别,我这个应用采用进程通信(IPC)做了例子,该例子将上一篇文章例子结合起来:
有两个进程, 进程1和进程2
进程1,通过接收等待进程2读取的传感器数据是否超标的状态,来进行闪灯。
进程2,通过读取ap3216c传感器光强度数据,判断是否超过50lux,如果超过则通知进程1进行闪灯提示。
IPC通信,详情可以查看官网:https://www.rt-thread.org/document/site/rt-smart/architecture/architecture/。
进程1,等待接收通道发来的“warning”信息,然后进行闪灯操作:
int main(int argc, char **argv)
{
struct rt_device_pin_mode pin_mode;
struct rt_device_pin_status pin_status;
int server_ch;
int shmid;
struct rt_channel_msg msg_text;
char *str;
printf(“RiceChen rt-smart first app
”);
/* create the IPC channel for ‘server’ */
server_ch = rt_channel_open(“server”, O_CREAT);
if (server_ch == -1) {
printf(“Error: rt_channel_open: fail to create the IPC channel for server!
”);
return -1;
}
printf(“
server: wait on the IPC channel: %d
”, server_ch);
pin_dev = rt_device_find(“pin”);
if(pin_dev == RT_NULL)
{
printf(“not find pin device
”);
return RT_ERROR;
}
rt_device_open(pin_dev, RT_DEVICE_OFLAG_RDWR);
pin_mode.pin = LED_PIN;
pin_mode.mode = 0; //OUTPUT
rt_device_control(pin_dev, 0, (void *)&pin_mode);
pin_status.pin = LED_PIN;
while(1)
{
rt_channel_recv(server_ch, &msg_text); //接收通道信息
shmid = (int)msg_text.u.d;
if (shmid 《 0 || !(str = (char *)lwp_shmat(shmid, NULL)))
{
msg_text.u.d = (void *)-1;
printf(“server: receive an invalid shared-memory page.
”);
rt_channel_reply(server_ch, &msg_text); /* send back -1 */
continue;
}
if(strcmp(str, “warning”) == 0) //判断是否接收到“warning”信息
{
printf(“light warning.
”);
pin_status.status = 1;
rt_device_write(pin_dev, 0, (void *)&pin_status, sizeof(pin_status));
rt_thread_mdelay(200);
pin_status.status = 0;
rt_device_write(pin_dev, 0, (void *)&pin_status, sizeof(pin_status));
rt_thread_mdelay(200);
pin_status.status = 1;
rt_device_write(pin_dev, 0, (void *)&pin_status, sizeof(pin_status));
rt_thread_mdelay(200);
pin_status.status = 0;
rt_device_write(pin_dev, 0, (void *)&pin_status, sizeof(pin_status));
rt_thread_mdelay(200);
}
lwp_shmdt(str);
msg_text.type = RT_CHANNEL_RAW;
msg_text.u.d = (void *)1;
rt_channel_reply(server_ch, &msg_text);
}
return 0;
}
进程2,间隔两面读取一次传感器光强度数据,然后判断是否操作50lux,超过则通过通道通知进程1进行闪灯:
int main(int argc, char **argv)
{
rt_device_t ap3216c_dev;
struct rt_sensor_data sensor_data;
int res;
int server_ch;
char warning_msg[256] = { 0 };
size_t len = 0;
/* channel messages to send and return back */
struct rt_channel_msg ch_msg, ch_msg_ret;
printf(“RiceChen rt-smart second app
”);
/* open the IPC channel created by ‘pong’ */
server_ch = rt_channel_open(“server”, 0);
if (server_ch == -1)
{
printf(“Error: rt_channel_open: could not find the ‘server’ channel!
”);
return -1;
}
ap3216c_dev = rt_device_find(SENSOR_NAME);
if (ap3216c_dev == RT_NULL)
{
rt_kprintf(“Can‘t find device:%s”, SENSOR_NAME);
return -1;
}
if (rt_device_open(ap3216c_dev, RT_DEVICE_FLAG_RDWR) != RT_EOK)
{
rt_kprintf(“open device failed!”);
return -1;
}
rt_device_control(ap3216c_dev, RT_SENSOR_CTRL_SET_ODR, (void *)100);
while(1)
{
res = rt_device_read(ap3216c_dev, 0, &sensor_data, 1); //读取传感器数值
if (res != 1)
{
rt_kprintf(“read data failed!size is %d
”, res);
}
else
{
rt_kprintf(“light:%5d lux, timestamp:%5d
”, sensor_data.light, sensor_data.timestamp);
}
if(sensor_data.light 》 50) //判断阈值
{
ch_msg.type = RT_CHANNEL_RAW;
snprintf(warning_msg, 255, “%s”, “warning”);
len = strlen(warning_msg) + 1;
warning_msg[len] = ’‘;
int shmid = prepare_data(warning_msg, len);
if (shmid 《 0)
{
printf(“clent: fail to prepare the clent message.
”);
continue;
}
ch_msg.u.d = (void *)shmid;
rt_channel_send_recv(server_ch, &ch_msg, &ch_msg_ret); //发送警报信息
lwp_shmrm(shmid);
}
rt_thread_mdelay(2000);
}
rt_device_close(ap3216c_dev);
rt_channel_close(server_ch);
return 0;
}
演示
原文标题:rt-smart用户态通过IPC通信玩转传感器数据
文章出处:【微信公众号:RTThread物联网操作系统】欢迎添加关注!文章转载请注明出处。
责任编辑:haq
-
通过串口通信的传感器数据采集2014-07-02 0
-
用labview通过wifi读取485传感器数据(附通过com口方式读取数据VI已完成)2015-12-15 0
-
零起点三天玩转物联网--多种通讯方式+传感器(连载)2016-12-16 0
-
近场通信(NFC)传感器应答器帮你管理重要数据2018-09-10 0
-
无线通信模块与压力传感器的选择2019-04-17 0
-
什么是传感器?2019-05-15 0
-
请问传感器收集的数据通过wifi怎么传送到主机数据库?2019-07-09 0
-
如何将传感器与PSoC通信?2019-10-12 0
-
怎么通过UART和传感器通信?2020-03-26 0
-
图解通信原理与案例分析传感器种类以及传感器工作原理详解2021-06-30 0
-
浅谈传感器数据结构统一封装方法2022-01-14 0
-
stm32中485通信读取传感器数据的方法2022-02-21 0
-
如何在STM板上使用机器学习算法对通过工业传感器获取的气体传感器数据进行分类?2023-01-10 0
-
rt-smart用户态通过IPC通信玩转传感器数据2022-01-25 164
-
Arduino项目之玩转颜色传感器2023-02-10 407
全部0条评论

快来发表一下你的评论吧 !
