

机器人控制系统工具坐标的特点及用途
描述
工具坐标的特点及用途
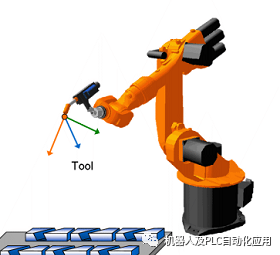
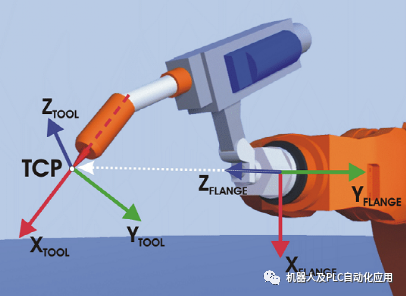
机器人控制系统通过测量工具 (工具坐标系)识别工具顶尖 ( TCP - Tool Center Point,即工具中心点 )相对于法兰中心点位于何处以及其方向如何。


因此,工具测定包括
TCP (坐标系原点)的测量
找正坐标系
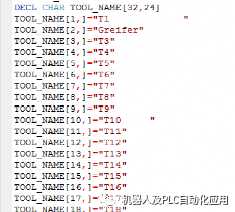
找正最多可储存 16 个工具坐标系。(变量:TOOL_DATA[1…16])。
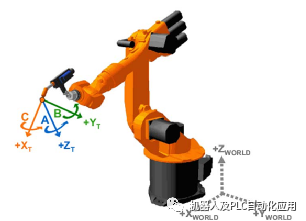
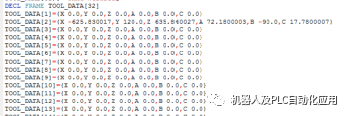
测量时,工具坐标系到法兰坐标系的距离(用 X、Y 和 Z)以及坐标系的转角(角度 A、B 和 C)被保存。
如果一个工具已精确测定,则在实践中对操作和编程人员有以下优点:
改善手动运行
可围绕 TCP (例如:工具顶尖)改变方向。
沿工具作业方向移动
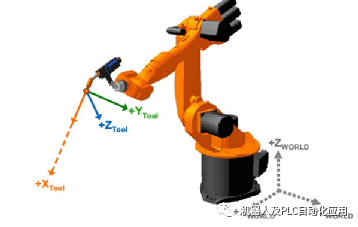
在轨迹运动编程(直线或圆形运动)时使用
沿着 TCP 上的轨道保持已编程的运行速度。

此外,可沿着轨迹进行定义的方向导引。
下面我们说一下通过WorkVisual 进行坐标设定
编辑工具和基坐标系
打开工具/基坐标管理可对工具和基坐标系统进行创建、编辑和删除。另外可用拖放功能将坐标系分配给另一个编号。
选择菜单矊列编辑器-> 工具/基坐标管理。

机器人使用坐标总览:

双击可以进入单个坐标设置:可以进行坐标编辑.

导入工具和基坐标系;

直接在文件 $config.DAT 中对工具和基坐标系作出的更改可以导入项目中。
工具坐标的名称变量:
工具坐标的参数变量:
责任编辑:xj
原文标题:WorkVisual 编辑工具坐标
文章出处:【微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
[转帖]工业机器人的基础知识2010-05-18 0
-
机器人的坐标系的建立2013-06-10 0
-
工业机器人的基本结构2015-01-19 0
-
什么是工业机器人2015-01-19 0
-
先进机器人控制2017-09-19 0
-
嵌入式服务机器人控制系统能实现什么功能?2019-10-15 0
-
基于CAN总线和双传感器仿人机器人运动控制系统的研究2020-08-19 0
-
桁架机器人的概念与特点都有哪些?2020-11-30 0
-
有关机器人控制系统的基本知识都总结好了2021-06-30 0
-
关于机器人控制系统的这几方面知识你必须掌握2021-07-05 0
-
机器人系统与控制需求简介2021-09-08 0
-
机器人的控制系统2021-09-13 0
-
什么是机器人控制系统2021-10-11 0
-
如何使用树莓派开发智能机器人控制系统2021-12-23 0
-
通过多轴工业机器人来聊聊机器人控制系统以及控制器的实现2023-02-24 0
全部0条评论

快来发表一下你的评论吧 !
