

【紫光同创国产FPGA教程】【第十六章】SOBEL边缘检测例程
描述
本原创教程由芯驿电子科技(上海)有限公司(ALINX)创作,版权归本公司所有,如需转载,需授权并注明出处(http://www.alinx.com)。
适用于板卡型号:
PGL22G/PGL12G
1. 实验简介
本实验将在例程“OV5640摄像头HDMI显示例程”的基础上实现视频图像边缘检测的实验。在很多应用场合,我们只需要采集到图像的棱廓特征的信息,而不需要全部的视频图像,这样就需要用到SOBEL边缘检测的算法。
2. 实验原理
2.1边缘检测原理和算法
边缘是图像最基本的特征,其在计算机视觉、图像分析等应用中起着重要的作用,这是因为图像的边缘包含了用于识别的有用信息,是图像分析和模式识别的主要特征提取手段。
在图像中,“边缘”指的是临界的意思。一幅图像的“临界”表示为图像上亮度显著变化的地方,边缘指的是一个区域的结束,也是另一个区域的开始。“边缘点”指的是图像中具有坐标[x,y],且处在强度显著变化的位置上的点。
常用的边缘检测算法大多是以原始图像灰度值为基础,通过考察图像的每个像素的某个邻域内灰度的变化,利用边缘一阶或二阶导数的规律来检测边缘。下图左边为原始的黑白灰度的图像,通过边缘检测算法后变成了右边的图像。
实现边缘检测有很多不同的方法,也一直是图像处理中的研究热点,人们期望找到一种抗噪强、定位准、不漏检、不误检的检测算法。其中Sobel算子效果较好,边缘检测算法比较简单,实际应用中效率比canny边缘检测效率要高,但是边缘不如Canny检测的准确,但是很多实际应用的场合,sobel边缘却是首选,尤其是对效率要求较高,而对细纹理不太关心的时候。本实验就采用Sobel的算法来实现视频图像的边缘检测。
2.2 sobel简介
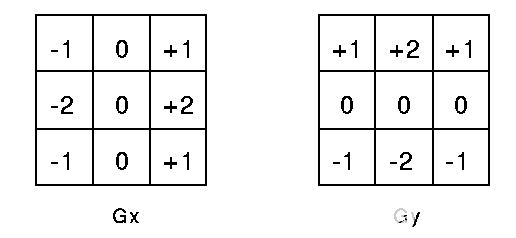
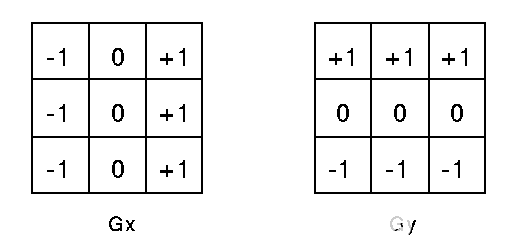
sobel是一个梯度的计算,如下图所示,是x和y方向的3x3窗口的卷积。
梯度计算公式
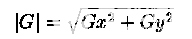
,简化的近似计算
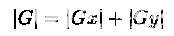
对于图像,如下图:P1到P9为3x3的9个像素点,简化公式计算:

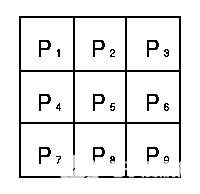 3x3图像窗口
3x3图像窗口
为了进一步简化计算,我们把算子进行简化,调整为如下所示
3. 程序设计
本实验的重点是sobel算法的实现,首先需要一个3x3的像素窗口,本实验利用xilinx提供的VHDL程序,做了一个3行的图像缓存,这样就可以轻松实现3x3的窗口。
然后按照简化公式,采用绝对值的方式计算sobel。
always@(posedge pclk)begin
x1 <={2'b00,p11}+{2'b00,p31}+{1'b0,p21,1'b0};
x3 <={2'b00,p13}+{2'b00,p33}+{1'b0,p23,1'b0};
y1 <={2'b00,p11}+{2'b00,p13}+{1'b0,p12,1'b0};
y3 <={2'b00,p31}+{2'b00,p33}+{1'b0,p32,1'b0};endalways@(posedge pclk)begin
abs_x <=(x1 > x3)? x1 - x3 : x3 - x1;
abs_y <=(y1 > y3)? y1 - y3 : y3 - y1;
abs_g <= abs_x + abs_y;end
计算完成以后,要进行简单的二值化处理,将sobel值和阈值对比,产生黑白的二值化图像。
always@(posedge pclk)begin data_out <=(abs_g > threshold)?8'h00:8'hff;end
4. 实验现象
1)将摄像头模块插入开发板,保证1脚对齐,1脚在焊盘形状和其他引脚是有明显区别的,是方形的。
OV5640摄像头模块连接开发板连接图
2)连接好HDMI显示器。
3)下载实验程序,可以看到只有边沿信息的黑白视频输出。注意:ov5640模块焦距是可调的,如果焦距不合适,图像会模糊,旋转镜头,可以调节焦距。摄像头模块要轻拿轻放,不要用手触摸元器件。
-
2024新品|紫光同创盘古系列FPGA开发板套件,100%国产化方案2023-12-28 0
-
国产FPGA介绍-紫光同创2024-01-24 0
-
紫光同创FPGA有哪些型号2024-01-24 0
-
至芯科技之altera 系列FPGA教程 第十六篇 下载配置文件2016-08-11 0
-
基于FPGA的Sobel边缘检测的实现2017-08-29 0
-
基于FPGA的边缘检测和Sobel算法2017-11-29 0
-
紫光同创简介2018-05-26 0
-
紫光同创PGL22G开发板|盘古22K开发板,国产FPGA开发板,接口丰富,高性价比2023-09-21 0
-
基于紫光同创PGL50H-6IFBG484的光端机方案2023-11-02 0
-
基于紫光同创FPGA的多路视频采集与AI轻量化加速的实时目标检测系统2023-11-02 0
-
紫光同创FPGA开发套件,高性能国产FPGA方案2023-11-16 0
-
第十六讲 编码器2009-03-30 5718
-
sobel_FPGA l边缘检测2016-05-03 336
-
视频_高速放大器设计指南 第十六版2017-03-05 928
-
第十六届中国通信产业榜发布 紫光展锐荣获两项大奖2022-12-21 893
全部0条评论

快来发表一下你的评论吧 !
