

基于3D设计和打印的单转子无人机方案
描述
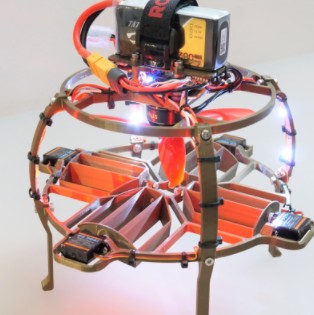
该项目展示了完整的3D设计和打印的单转子无人机。仅有一个转子和风叶用于位置控制的特殊设计使该项目在无人机领域特别有趣。使用了常见的RC组件,例如无线电接收器,电池,ESC,电机,螺旋桨,伺服系统。除了对设计本身进行重大更改之外,现在还使用了商用飞行控制器。设置Betaflight与该主题本身的许多背景信息和链接一样重要。

组件:
数量 组件名称
1个 TATTU 1300mAh锂电(3节电池11.1V 14.4Wh)
1个 透音MAMBA F405 MK2F405飞行控制器(Cleanflight / Betaflight / Cleanflight)
1个 天马F35A(bl_heli32 ESC)
1个 Flysky FS-A8S (V2迷你RC接收器,带有ppm i-bus总线)
1个 风暴TL2306(2300kV无刷电机)
4个 磐正ES9051(数字超微伺服)
1个 6042 6x4.2道具
1个 WS2812b(灯带)
10个 M3x10
4个 M3x12
8个 M3螺母
4个 M3 15mm垫片(无螺纹)
Betaflight在过去几年中不断发展-不断添加新功能以进一步改善赛车的飞行行为。 坦率地说,请关闭所有功能并坚持基本操作! 当然,这有点夸张,但是不需要Betaflight的许多高级控制器功能,甚至会使无人机的飞行行为变得不稳定。原因很简单。使用“普通” 4x无人机,每个转子都可以直接干预系统。但是,球形无人机需要最小的推力,以便通过导风板向系统施加有效力。仅根据来自加速度计和陀螺仪的位置信息,才需要对叶片进行PID控制。为了生成此位置信息,Betaflight还提供了许多设置选项,尤其是用于信号处理(滤波器)的设置选项,我希望在将来对其进行详细研究。 到目前为止,我进行的试飞在显示的设置下效果最佳:
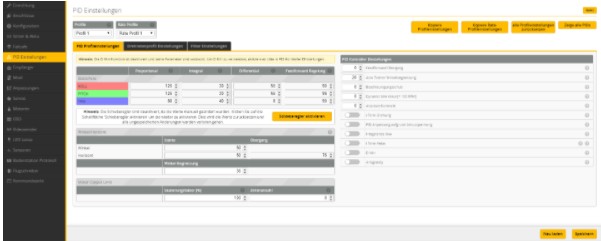
请注意,与经典x-220赛车手相比,P的百分比很高。无人机将具有较高的D分量和较小的I分量,从而更加稳定。 我还想指出角度限制:通过设置角度限制,可以降低无人机可能翻倒的风险。 将来,我希望了解BF的黑匣子日志记录,并希望能够从中得出有关PID设置的重要信息。
与以前的球形无人机相反,我现在想使用几乎每个人都可以免费使用的飞行控制器和软件。有很多开源项目,但是Betaflight当前是赛车的标准,互联网上有许多教程和资源,这使我不再赘述betaflight。但是,您如何从赛车四轮驱动飞行器到单旋翼无人驾驶飞机呢?就是这样:
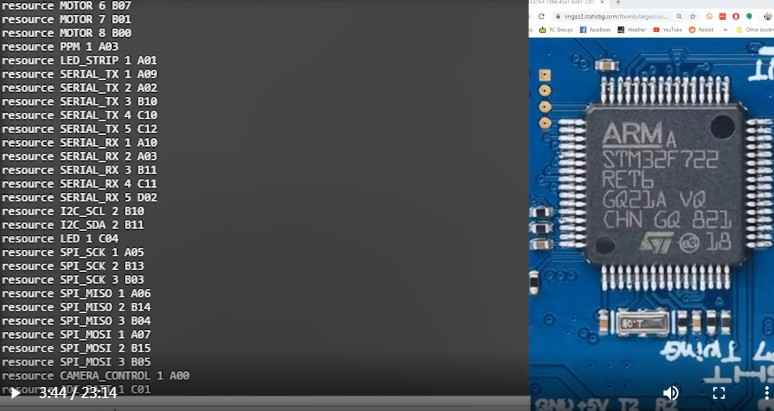
基本上,您需要一个电动机和四个伺服器来控制您的单旋翼直升机。大多数飞行控制器具有四个电动机,其中一些也具有一些伺服输出。我所做的是将Betaflight伺服控件重新映射到“标准”的四个电机输出。现在需要连接电动机。通过我使用的飞行控制器的配置,我能够看到哪些连接计时器可用。您经常阅读有关将LED_strip端口用于电动机的信息,但是我想使用LED_strip端口并决定将PPM输入重新映射为电动机输出。例如,在此视频中显示了什么是资源重新映射以及如何重新映射。
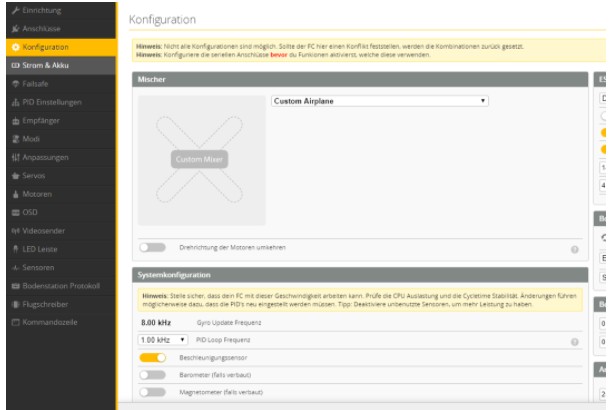
接下来,必须使飞行控制器向伺服器和电动机发送正确的信号。为此,必须在所谓的混合器中进行调整。在配置标签下选择“自定义飞机”。
通过命令行处理:
#MambaF405_MK2(由Benjamin Prescher设计)
# smix script for singlecopter on MambaF405_MK2 (by Benjamin Prescher)
mixer CUSTOMAIRPLANE
# load a standard motor mix
mmix reset
mmix load airplane # Motor1 as ESC output
#mmix 0 1.000 0.000 0.000 0.000
# smix
smix reset
smix 0 3 0 100 0 0 100 0
smix 1 2 0 -100 0 0 100 0
smix 2 4 1 100 0 0 100 0
smix 3 5 1 -100 0 0 100 0
smix 4 3 2 50 0 0 100 0
smix 5 2 2 50 0 0 100 0
smix 6 4 2 50 0 0 100 0
smix 7 5 2 50 0 0 100 0
save
如您在混频器配置的图片中所见,我设置了相对较低的PID环路速率。通常,控制直升机的伺服器可以通过max。〜333Hz(当然还有一些伺服器可以处理更多信号)。我已经将我的Servo_pwm_rate设置为250Hz,这相当于PID环路速率的四分之一。据我了解betaflight中的算法,如果执行机构的命令无论如何都只能更新其一小部分,则没有必要人为设置PID速率。对于PID(稍后会在其他日志中详细介绍),我使用强P值。带有叶片的伺服器然后倾向于摆动。Betaflight具有解决此问题的强大功能,这称为伺服低通滤波器: 通过命令行处理:
set servo_lowpass_hz = 20
set servo_pwm_rate = 250
save
测试时间: 如果您已经设置了无人机,连接了所有设备并且还实现了配置,那么您的无人机应该表现为: 发射器向右滚动使前后鳍向右移动 发射器俯仰向前导致左鳍和右鳍向前移动 发射器向右偏航会导致前鳍向左移动,右鳍向前移动,后鳍向右移动,左鳍向后移动。
责任编辑:pj
-
全球最大的FDM 3D打印无人机2018-04-15 7992
-
无人机开发方案要领与电路图集锦2015-05-07 0
-
无人机侦测和反制系统2017-04-05 0
-
SKYLAB详解无人机GPS模块的作用及无人机gps模块选型2017-06-22 0
-
无人机类型之植保无人机,带你了解什么是植保无人机?2019-06-28 0
-
未来无人机是否会主宰战场2020-05-15 0
-
文博会 合肥造植保无人机亮相2020-05-15 0
-
多轴无人机BLDC驱动解决方案2020-07-02 0
-
航模/无人机遥控的解决方案2020-07-03 0
-
无人机3个保养小技巧2021-09-08 0
-
White Clouds为3D打印无人机提供全面服务_3D打印,无人机,大数据2016-11-07 511
-
解析3D打印无人机的三大最佳应用领域2016-11-21 1958
-
Nano-Racing无人机:3D打印机身让装配更简单2016-12-24 704
-
如何利用3D打印技术生产无人机?2016-12-26 886
-
当3D打印应用在无人机有何不同?2021-01-07 1251
全部0条评论

快来发表一下你的评论吧 !
