

LPC2141的无刷直流电机控制系统设计
MEMS/传感技术
描述
LPC2141的无刷直流电机控制系统设计
1 概 述
无刷直流电机是最常用的无刷电机。它易于驱动,速度可调且工作寿命长,适用于各类大小型工业应用,诸如小型马达的控制(如12 V直流无刷电机)。
LPC2141是NXP公司推出的嵌入高速Flash闪存的32位ARM微控制器,具有高性能、小体积、低功耗、片上可选择多种外设等优点,应用范围很广。LPC2141包括多个32位定时器、10位ADC和PWM输出功能,通过匹配PWM定时器的输出,可以适合于各种工业控制;芯片上集成USB,可以通过USB接口连接PC GUI(图形用户界面)软件,方便地控制电机。
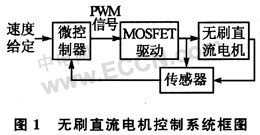
本文基于LPC2141的无刷直流电机控制系统设计,包括NXP公司完整的电机控制系统解决方案(NXP公司的ARM微控制器、MOSFET驱动器、MOSFET等)。无刷直流电机控制系统框图如图1所示。
2无刷直流电机原理
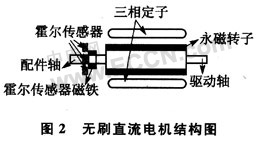
无刷直流电机由永磁转子和三相定子组成,如图2所示。无刷直流电动机不使用电刷换相,而是采用电子换相。通常,3个霍尔传感器用来检测转子位置,通过检测这些传感器的不同时序来换相。
无刷直流电机控制(Brushless DC Motor Control,BLDC)马达,比传统的有刷直流电动机和三相异步电动机有更多的优势,提供更长的使用寿命,具备更好的速度与转矩特性、更低的噪声和更宽的速度范围。此外,由于电机的扭矩较大,对于矢量空间和重量起关键因素的场合更加实用。
在无刷直流电机中,电磁场不旋转运动,而永磁旋转,三相定子绕组保持静态。这可能会产生一个问题,如何传递电流给运动的转子。为了解决这个问题,电刷换向器被智能电子控制器所取代。有刷直流电动机中该控制器也执行相同的功率分配,但使用的是电路控制,而不是一个换向器/刷系统。
电动机的速度和扭矩取决于带电绕组电机所产生的磁场的强度,磁场的强度又取决于通过的电流大小。因此,调整转子电压(或电流)将改变电机转速。
3无刷直流电机的控制
3.1转子的控制
无刷直流电机的驱动必须考虑在转子的不同位置施加不同的电压,即必须正确控制三相绕组系统的电压相序,以便使定子磁场和转子磁场之间的相角度始终接近90°,从而获得最大的扭矩。因此,控制器需要一些控制策略来确定转子的方向/位置(相对于定子线圈)。
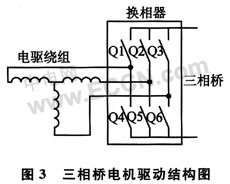
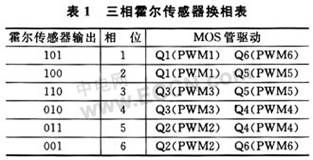
本设计使用霍尔传感器来直接测量转子的位置(也有一些应用中使用旋转编码器,或者在驱动线圈中使用反电势的方式)。当一个传感器输出180°电角度的高电平时,其他传感器输出180°的低电平。3个传感器两两有60°相角度差,因此很容易将传感器的轮换分为6个阶段(通过3位二进制代码表示)。图3为三相桥电机驱动结构图。表1则显示了三相霍尔传感器输出电平值和实际的电机绕组MOS管驱动换相之间的关系。
3.2速度的控制
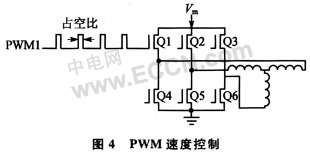
通过改变加在电机上的电压,可以改变电机的转速。如图4所示,使用PWM输出来控制6个开关三相桥(Q1~Q6),可以通过改变占空比的PWM信号来调整电机的电压。
3.3电机的反馈
3.3.1 电流测量
电机电流的低成本测量可以在MOSFET与地之间使用电流感应电阻。小电压出现在电流检测电阻上,经过滤波和放大之后,输入到LPC2141的ADC输入端。
电机的电流测量也经常用于保护模式。当电机在堵转位置时,电流会急剧增加。由于电流的异常突变,ADC的数值会达到一个极限,从而将系统关断,切换到保护模式,从而提高系统的安全系数。
3.3.2 RPM转速测量
作为闭环速度控制,实际的电机速率必须实时监测。通过霍尔传感器连接LPC2141的输入引脚,可以很准确地测量电机转速。常用如下2种方法:
①连接霍尔传感器输出到LPC2141的外部中断输入引脚。这样每60°电角度就会产生一次中断。通过在一定的确切时间(如1 s)统计计数中断的数量,即可很容易地计算出精确的电机速度。
②连接传感器信号到LPC2141的定时器捕获引脚,通过衡量每一个旋转相位的切换时间来计算电机的转速。
4硬件设计
4.1 LPC2141的使用方法
LPC2141的系统功能框图如图5所示。LPC2141是NXP公司基于ARM7的LPC2000系列低成本微控制器,具有6通道PWM定时器、片上USB接口、8 KB的片上静态RAM和32 KB的片上闪存程序存储器。对于较大的存储或特定外设(CAN总线、以太网等)的要求,可以选择LPC2000系列的其他型号(如LPC2368等),这些芯片都是和LPC2141兼容的。
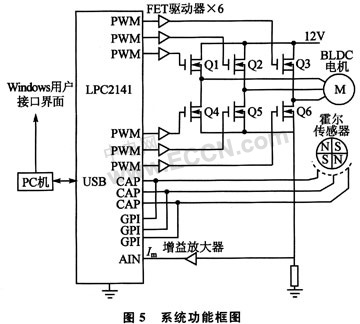
本设计具备如下特性:CPU负载小于5%,代码大小为6 KB(包含USB通信代码);未用的外设包括UART、I2C、SPI/SSP、RTC、2个定时器和5个A/D输入;超过30个未用的通用输入输出口GPIO,用于用户的特定应用要求。
4.2电机的选择
使用Maxon公司120 W的EC-40直流电机。空载时供电电压为24 V,电机的转速可达到5 900 r/min,最大的连续电流达到6 A。
4.3 MOSFET的选择
选用NXP公司的PH20100S N沟道场效应管Trench-MOS逻辑电平。这个电平与选定的电机有关。对于24 V电机,MOSFET的VDS需要至少40 V,而漏电流必须足够大,以满足电机的启动电流。由于系统程序代码设计了软启动机制(对于小台阶的启动需要一定的速度),漏电流在一定程度上有所减小。PH20100S能够处理的最大漏极电流是34.3 A,峰值电流是137 A,采用表面贴装SOT669(LFPAK)封装。
4.4 MOSFET驱动的选择
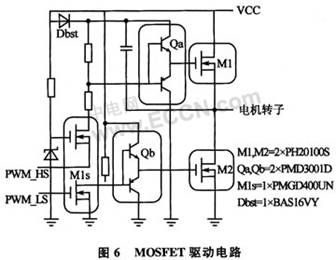
MOSFET驱动用于提升控制器LPC2141输出驱动电机的电压。本文选择NXP公司的PMD3001D和PMGD400UN作为MOSFET,驱动电路如图6所示。
4.5电机速度的调整
LPC2141集成6通道32位PWM定时器,通过设定不同的PWM占空比数值来控制电机的转速,通过USB接口读取电机实际的转速。
5 软件设计
本系统软件部分包括3部分:用户接口(GUI)、USB设备驱动和BLDC电机控制代码。
5.1 用户接口
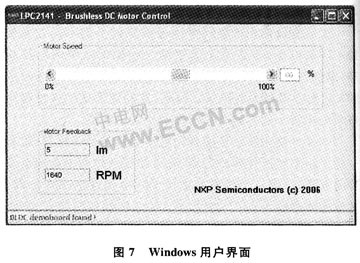
Windows的用户界面可控制无刷直流电机演示,如图7所示。该应用程序软件是BLDC_USBGUI.EXE,采用Mierosoft Visual Basic 2008专业版开发,需要在PC机上安装Microsoft.NET Framework,可方便地控制电机速度和读取电机电流及转速。
5.2 USB设备驱动
USB通信部分可以到Keil公司网站(www.keil.com)上下载USB通信代码(LPC2148 USB HID人体学设备驱动代码)。如有疑问可与笔者联系(okarmdy@gmail.com)。
5.3 BLDC电机控制代码
本例程序采用C语言编写,采用Keil公司uVision3开发环境进行编译。系统执行的任务如下:
①USB接口用于接收电机的转速信息,以及设定电机电流和转速。
②使用10位A/D输入检测电机电流大小,用于保护电机。
③使用定时器1产生10 ms的系统中断时间戳,用于在不同时间戳切换和分派系统任务。
④使用定时器0的捕获引脚读取霍尔传感器来控制电机的转子,设定PWM定时器占空比来控制转速,驱动Q1~Q6的MOSFET输出,从而控制三相桥的导通与关断。
电机控制部分代码包括5个模块:bide.c、adc.c、pwm.c、hsensor.c、timerl.c。头文件bidc.h用于设置无刷直流电机控制的相关参数(如电机电流和转速设定等)。使用Keil’s uVision3调试开发环境自带的标准启动代码库配置LPC2141芯片,设置CCLK=PCLK=60 MHz。
结语
本文使用LPC2141微控制器设计了一款无刷直流电机控制系统,代码精简,控制可靠。经过长期测试证明,系统相关器件的选型设计是稳定的。从芯片设计和系统低成本设计上,该系统具有一定的应用推广价值。
-
无刷直流电机闭环控制系统设计及软硬件实现2009-12-18 0
-
基于STM32无位置传感器无刷直流电机控制C程序2014-01-18 0
-
基于DSP的无刷直流电机控制系统的设计2015-11-06 0
-
无刷直流电机控制系统经验2016-01-04 0
-
一种用过PWM调速的无刷直流电机调速控制系统2016-01-05 0
-
基于单片机的航模无刷直流电机调速控制系统2016-01-14 0
-
无刷直流电机的全数字控制系统设计2016-01-18 0
-
基于FPGA的控制系统永磁无刷直流电机控制电路设计2016-02-01 0
-
【秀秀资源】永磁同步电机和无刷直流电机干货资料分享2017-02-15 0
-
什么是无刷直流电机(BLDC)以及它的应用2019-07-04 0
-
如何控制无刷直流电机?2021-03-10 0
-
【原创分享】无刷直流电机控制简介2021-06-02 0
-
matlab仿真直流电机与基于Matlab/Simulink的无刷直流电机控制仿真研究2021-07-05 0
-
【资料】无刷直流电机运行原理与基本控制方法2021-07-24 0
-
怎样去设计一种基于单片机的无刷直流电机PID调速控制系统2021-08-06 0
全部0条评论

快来发表一下你的评论吧 !
