

如何使用多类车载传感器快速可靠地生成点云地图?
描述
本文介绍了在智行者各产品线广泛使用的点云地图构建方法,其论文发表在32nd IEEE Intelligent Vehicles Symposium, 2021会议上。
论文对应图流
1. 动机
高精地图是L4级别自动驾驶车辆得以自动运行的关键技术。高精地图为自动驾驶车辆提供车道级别的导航信息与拓扑信息,无论是乘用车还是低速车都需要这类信息来进行导航。通常,高精地图是在点云地图基础上生成的。随着自动驾驶车辆的不断普及,如何快速、高效、可靠地为各类场地生成点云地图,成为自动驾驶技术普及的关键。
然而,目前高精地图方案主要针对城市高速道路。在实际运营自动驾驶车辆时,仍然存在诸多问题。比如,图商提供的高精地图方案成本过高,而建图及时性与地图覆盖率明显不足;乘用车方案则对弱GPS场景、非结构化道路、半室内场景支持不够。另一方面,机器人端使用的在线建图与定位方案,虽然能够以很快速度建立地图,但以栅格地图为代表的2D地图无法支持较复杂的交通规则,在室外场景也存在可靠性问题。
本文介绍了一种如何使用多类车载传感器进行融合,快速可靠地生成点云地图的方法。主要贡献如下:
我们使用鲁棒的因子图模型来融合各类传感器数据。我们讨论了需要定义哪些因子,如何平衡各类因子对优化问题的影响。
我们讨论在现实场景中面临的一些建图问题,例如:如何处理RTK异常数据,如何处理激光退化,如何使用回环检测保障地图质量,如何在半室内或全室内场景约束高度和全局姿态,等等。
示例车辆与运行环境的点云地图
一个典型无人车辆点云地图及其局部形状
2.方法
建图流程图如下:
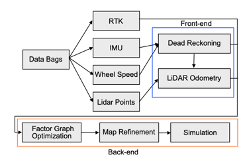
建图算法框架整体由前端加后端组成。前端用IMU和轮速计组成航迹推算模块(Dead Reckoning),然后计算激光里程计。后端由因子图优化以及一些后处理模块组成。在这个框架中,我们面临的问题主要来自后端优化。下面给出一些数据来讨论后端优化面临的问题与处理方式。
2.1 因子图优化建模
后端的一大挑战是在各种传感器输入信息中,找到正确且一致的部分,这在弱GPS、非结构化环境中显得更加重要。为了能够灵活处理传感器的信息,我们使用因子图优化来建模整个问题。因子图优化可以很好地表达多种传感器的自身特性,同时也允许我们灵活地控制优化流程,便于分析哪些因子主导了优化,哪些因子作为异常值被排除。
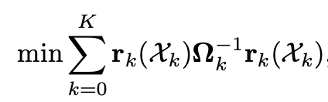
因子图本身是定义在SE(3)流形上的最小二乘优化问题:
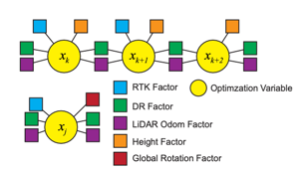
基础的因子包括:RTK因子、DR因子和LiDAR里程计因子。额外可选的因子包括:高度因子、全局旋转因子;不同因子主要用来施加各种场景中的地图形状约束。
2.2 RTK因子与RTK信息处理
RTK信号在固定解时标称精度达到cm级别,但其他时刻精度随自身状态变化很大,在单点解时也可能达到10m级别精度。如果受到多径效应影响,RTK接收机算法还可能给出错误的状态值,即使在固定解状态下也可能有很大误差。
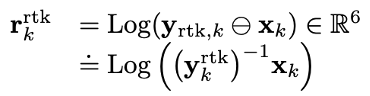
由于我们使用了双天线,因此将RTK因子视作6自由度的位姿约束:
下图显示了同一场景下的RTK状态与测量值。
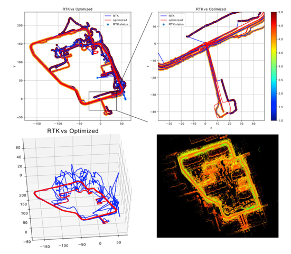
RTK信号不可靠的案例。上:RTK与优化轨迹对比图,蓝色为RTK,红色为优化轨迹,背影颜色为RTK状态;左下:3D视角对比轨迹;右下:点云地图。
由图可见,RTK即使在固定解状态时,也可能有各种跳变、慢变情况。本身精度在高度方面明显劣于水平方面。然而,在建图时,我们一方面要求地图与RTK对齐,一方面要处理RTK异常情况,这就要求算法能够自动化处理RTK异常值。为此,我们设计了一种两轮两阶段优化的处理逻辑。流程如下:
第一轮优化目标是得到基本正确的RTK-DR-Lidar轨迹,并且处理RTK异常值;第二轮目标是通过回环检测处理地图重复区域,减少重影的发生概率。
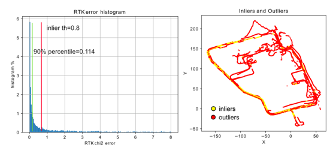
上图轨迹的误差平方直方图与正常值/异常值分布情况
实际操作当中,RTK异常值阈值可以存在一定的选择范围,只需要合理即可。我们既可以选得严格一些,把一些误差较大的读数剔除,也可以选的宽松一些,保留一些中间的约束。
2.3 回环检测与多机/多轨迹协同
在第二轮优化中,我们利用回环检测机制来检查地图重复区域的约束。
回环检测可以有效抑制地图重影。左:不带回环检测的全局地图和局部地图;右:带上回环检测之后的地图。整体上看,全局点云没有太大的变化,但局部点云确实被回环检测修正了。
同样,如果地图由多台机器采集,或者地图由多段轨迹拼接而成,也可以利用回环检测来修正重复区域。

多段轨迹案例。左上:位姿图;右上:多段轨迹的形状;下方:拼合后地图,地图颜色由轨迹ID着色。
2.4 退化检测与修正
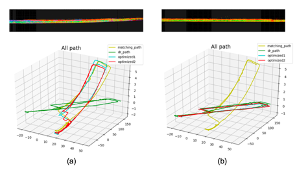
在广场等空旷场景,激光匹配由于缺少特征,其运动估计会由于存在额外自由度而出现漂移、抖动等情况。这种现象通常称为退化。在退化时,我们希望通过其他传感器的信息来补充激光的估计。
退化案例:上图是一个广场案例,广场中央存在一个雕塑。从广场边缘走向中央时,激光出现明显退化现象。中间:退化分值的分布情况;下方:退化修正前/修正后的轨迹。
在前端检测到激光退化时,我们在后端主动缩小激光的信息矩阵,从而使DR起到该段轨迹的主导作用,局部地修正此处的激光结构。
2.5 高度约束与全局姿态约束
对于室内的地图,由于缺少RTK约束,激光里程计在高度估计上可能存在累计误差。在这种场景中,我们引入场地与车辆的假设:场地整体为平地,车辆整体姿态向上。这种约束由高度因子与全局旋转因子实现。


同时,为了允许车辆存在一定程度上的高度变动和姿态抖动,我们给这两种约束增加死区设定。
高度约束施加后的轨迹与点云(侧视图)变化
3.对比实验
我们在采集的数据集上对比了一些经典的开源激光建图算法。实验主要传感器为:RTK服务(千寻FindCM)、6轴IMU(美泰SI3200 MEMS)、轮速计、顶部16线雷达(Velodyne-16)。由于现实世界的轨迹真值难以获取,我们挑选了一部分RTK较好的场景,然后将建图算法选择出的RTK正常值作为真值进行比较。
我们主要对比的模块为:DR、Lego-LOAM、Cartographer、mapping(无RTK)、mapping(有RTK)。其中Lego-LOAM使用了DR作为预测值,而Cartographer则直接使用IMU读取。由于Cartographer不支持轮速计输入,因此没有给Cartographer输入轮速。我们对Cartographer使用了默认参数,没有针对性的调参。另外,由于我们将估计轨迹与RTK对比,因此在各个算法中都不输入RTK数据,以保证公平性。
我们选择了13个场景,按大小分为小型与大型两类,以绝对位置精度(Absolute Translation Error, ATE)作为评价指标。作为对比,也给出了带RTK输入的Mapping位置。
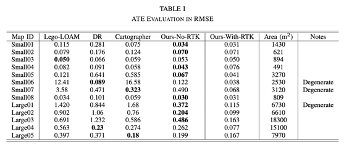
整体而言,我们在大部分场景下比Lego-LOAM和Cartographer取得了更好的精度指标。如果带有RTK信息,那么我们在大部分场景下能取得10cm精度左右的轨迹精度。
一些代表性地图
4.软件的自动化部署与运营
最后,为了保证建图算法的高效运营,我们将每个建图步骤抽象为流水线模型,并在云服务器端部署。流水线模型的每一步可以独立启动或中断,且各个建图任务彼此不发生冲突,保障了多个建图任务可以独立运行,互不干扰。
由于建图是自动触发、运营的,我们将建图结果统计成报告,自动发送给运营人员,实现了整个建图流程的24小时无人化管理。
责任编辑:lq6
-
【assingle分享】车载无线传感器网络监测系统设计2011-03-30 0
-
超声波传感器与红外传感器谁的可靠性更高?2018-09-25 0
-
Ametek新型可靠和精确的传感器2018-10-26 0
-
深度解析多传感器信息融合技术2018-11-07 0
-
多传感器信息融合技术解析2018-11-07 0
-
基于ARM的多传感器信息融合在工业控制中的应用2018-11-12 0
-
多传感器融合定位在高速铁路的应用2018-11-14 0
-
基于多传感器的多模型机动目标跟踪算法设计2018-12-05 0
-
车载IoT传感器的挑战2019-08-02 0
-
汽车传感器融合系统浅析2020-07-31 0
-
3D传感器有哪些类型2020-12-09 0
-
多参数水质河流湖泊环境检测传感器2021-05-21 0
-
STM32+ESP8266+MQTT多传感器数据上云OneNET2021-08-24 0
-
面向3D机器视觉应用并采用DLP技术的精确点云生成参考设计2022-09-22 0
-
什么是高精度地图2023-10-07 0
全部0条评论

快来发表一下你的评论吧 !
