

 AB32VG1连接无线网
AB32VG1连接无线网
描述
1、 资源介绍
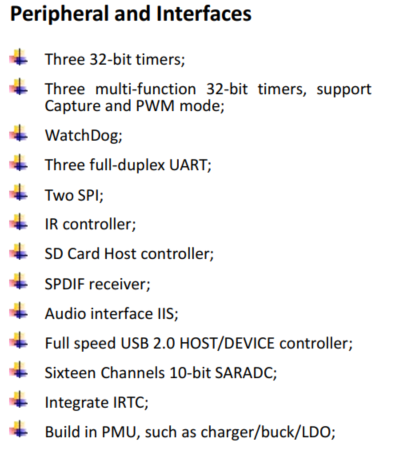
可以看到,AB32VG1拥有三个全双工串口
资源分配:
UART0 -> 上位机通讯
UART1 -> ESP8266无线网络
UART2 -> 待分配
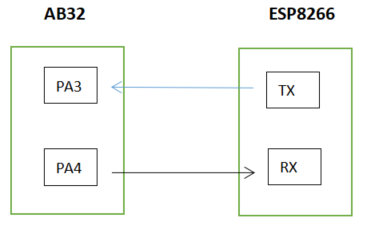
UART1所对应的引脚为PA3和PA4,其中PA3为RX1,PA4为TX1
2、ESP8266介绍:

3、连接图
单片机与ESP8266采用串口通讯(AT指令),功能:获取网络数据及设备联网
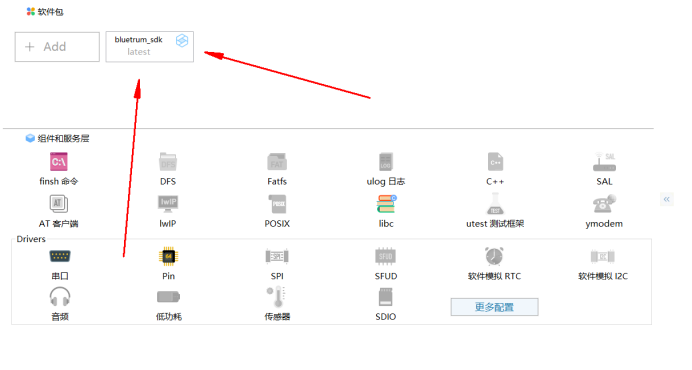
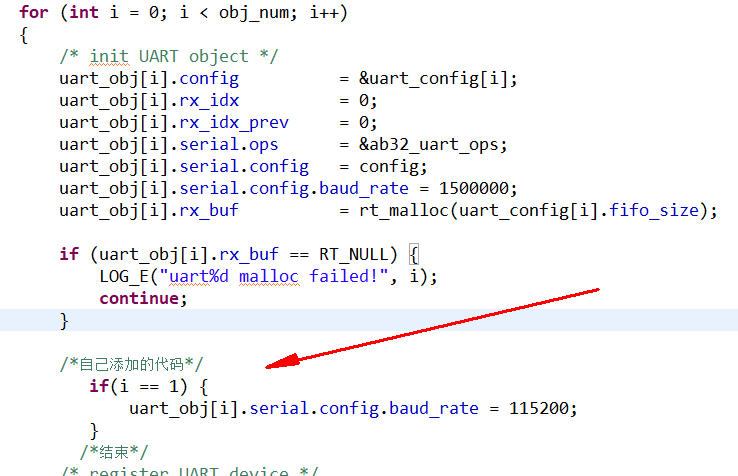
坑1、在程序实现之前,需要注意的点,在配置中需要打开“硬件”下的UART1功能,要注意配置截图中有没有SDK软件包,如果没有打开UART1口编译不通过。(升级软件版本2.1.2)
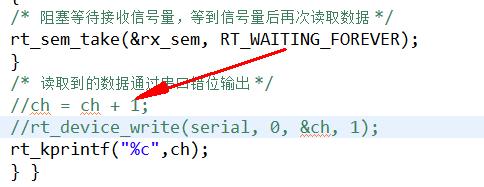
坑2、还有一个坑的地方,例程中:搞不明白为什么要错位,错位后收到的数据为乱码
坑3、波特率显示问题(要么整体改)
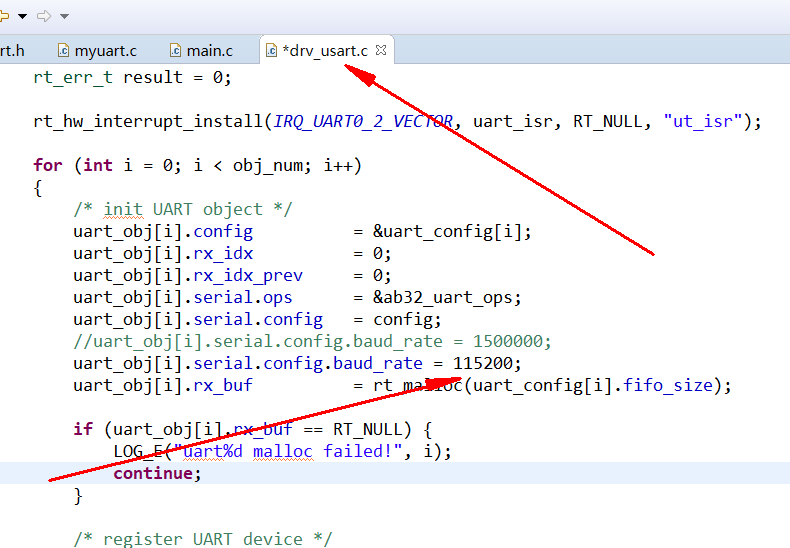
要么单独定义判断i的值
4、AT指令
1、 AT+RST
功能:重启模块
2、AT+CWMODE=
功能:mode=1 :Station模式(接收模式)
mode=2:AP模式(发送模式)
mode=3:AP+Station模式
3、AT+ CWSAP= ,,,
功能:配置AP参数(指令只有在AP模式开启后有效)
ssid:接入点名称
pwd:密码
chl:通道号
ecn:加密方式:(0-OPEN, 1-WEP, 2-WPA_PSK, 3-WPA2_PSK, 4-WPA_WPA2_PSK)
注意:此设置完成后,连接网络会可能出现连接不上的情况,请发送 AT+RST 命令并等待几分钟之
后再连接。
4、AT+CWLIF
功能:查看已接入设备的 IP
5、AT+CIFSR
功能:查看本模块的 IP 地址
注意: AP 模式下无效!会造成死机现象!
6、AT+CWMODE?
功能:查看本机配置模式
7、AT+CIPMUX?
功能:查询本模块是否建立多连接
说明: :0-单路连接模式, 1-多路连接模式
8、AT+CIPMODE?
功能:查询本模块的传输模式
说明: :0-非透传模式, 1-透传模式
9、AT+CIPSTO?
功能:查询本模块的服务器超时时间
10、AT+CIPMUX=1
功能:开启多连接模式
11、AT+CIPSERVER=1,8080
功能:创建服务器
关闭 server 服务如下图所示:
说明: :0-关闭 server 模式, 1-开启 server 模式
:端口号,缺省值为 333
说明: (1) AT+ CIPMUX=1 时才能开启服务器;关闭 server 模式需要重启
(2)开启 server 后自动建立 server 监听,当有 client 接入会自动按顺序占用一个连
接。
12、AT+CIPSTO=2880
功能:设置服务器超时时间
13、AT+CIPSTATUS
功能:查看当前连接
说明: :连接的 id 号 0-4
:字符串参数,类型 TCP 或 UDP
:字符串参数, IP 地址
:端口号
: 0-本模块做 client 的连接, 1-本模块做 server 的连接
14、AT+CIPSEND=1,6
功能:向某个连接发送数据
指令: 1)单路连接时(+CIPMUX=0),指令为: AT+CIPSEND=
2)多路连接时(+CIPMUX=1) ,指令为: AT+CIPSEND= ,
响应:收到此命令后先换行返回”>”,然后开始接收串口数据
当数据长度满 length 时发送数据。
如果未建立连接或连接被断开,返回 ERROR
如果数据发送成功,返回 SEND OK
说明: :需要用于传输连接的 id 号
:数字参数,表明发送数据的长度,最大长度为 2048
15、AT+CIPSERVER=0
功能:关闭 server 服务
指令: AT+CIPSERVER=[,]
说明: :0-关闭 server 模式, 1-开启 server 模式
:端口号,缺省值为 333
响应: OK
说明: (1) AT+ CIPMUX=1 时才能开启服务器;关闭 server 模式需要重启
(2)开启 server 后自动建立 server 监听,当有 client 接入会自动按顺序占用一个连
接。
16、AT+CIPSTART=2,"TCP","192.168.4.101",8080
功能:建立 TCP 连接
指令: 1)单路连接时(+CIPMUX=0),指令为: AT+CIPSTART= ,,
2)多路连接时(+CIPMUX=1),指令为: AT+CIPSTART=,,,
响应:如果格式正确且连接成功,返回 OK,否则返回 ERROR
如果连接已经存在,返回 ALREAY CONNECT
说明: :0-4,连接的 id 号
:字符串参数,表明连接类型, ”TCP”-建立 tcp 连接, ”UDP”-建立 UDP 连接
:字符串参数,远程服务器 IP 地址
:远程服务器端口号
17、AT+CIPSEND=2,8
指令: 1)单路连接时(+CIPMUX=0),指令为: AT+CIPSEND=
2)多路连接时(+CIPMUX=1) ,指令为: AT+CIPSEND= ,
响应:收到此命令后先换行返回”>”,然后开始接收串口数据
当数据长度满 length 时发送数据。
如果未建立连接或连接被断开,返回 ERROR
如果数据发送成功,返回 SEND OK
说明: :需要用于传输连接的 id 号
:数字参数,表明发送数据的长度,最大长度为 2048
18、AT+CWLAP
功能:查看当前无线路由器列表
响应:正确: (终端返回AP列表)
+ CWLAP: ,,
OK
错误: ERROR
说明: < ecn >:0-OPEN, 1-WEP, 2-WPA_PSK, 3-WPA2_PSK, 4-WPA_WPA2_PSK
:字符串参数,接入点名称
:信号强度
19、AT+CWJAP=”MERSAIN”,”XXXXXXXX”
功能:加入当前无线网络
指令: AT+CWJAP=,< pwd >
说明: :字符串参数,接入点名称
:字符串参数,密码,最长64字节ASCII
响应:正确: OK
错误: ERROR
20、AT+CWJAP?
功能:检测是否真的连上该路线网络
指令: AT+CWJAP?
响应:返回当前选择的AP
+ CWJAP:
OK
说明: :字符串参数,接入点名称
21、AT+CIFSR
功能:查看模块 IP 地址
指令: AT+CIFSR
响应:正确: + CIFSR:
OK
错误: ERROR
说明: :字符串参数,接入点名称
5、程序实现
myuart.c文件
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-11-04 Administrator the first version
*/
#include
#include "string.h"
#include "applications\myuart\myuart.h"
/* 用于接收消息的信号量 */
static struct rt_semaphore rx_sem;
static rt_device_t serial;
/* 接收数据回调函数 */
static rt_err_t uart_input(rt_device_t dev, rt_size_t size)
{
/* 串口接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */
rt_sem_release(&rx_sem);
return RT_EOK;
}
static void serial_thread_entry(void *parameter)
{
char ch;
while (1)
{
/* 从串口读取一个字节的数据,没有读取到则等待接收信号量 */
while (rt_device_read(serial, -1, &ch, 1) != 1)
{
/* 阻塞等待接收信号量,等到信号量后再次读取数据 */
rt_sem_take(&rx_sem, RT_WAITING_FOREVER);
}
/* 读取到的数据通过串口错位输出 */
//ch = ch + 1;
//rt_device_write(serial, 0, &ch, 1);
rt_kprintf("%c",ch);
} }
static int uart_sample(int argc, char *argv[])
{
rt_err_t ret = RT_EOK;
char uart_name[RT_NAME_MAX];
char str[] = "hello RT-Thread!\r\n";
if (argc == 2)
{
rt_strncpy(uart_name, argv[1], RT_NAME_MAX);
}
else
{
rt_strncpy(uart_name, SAMPLE_UART_NAME, RT_NAME_MAX);
}
/* 查找系统中的串口设备 */
serial = rt_device_find(uart_name);
if (!serial)
{
rt_kprintf("find %s failed!\n", uart_name);
return RT_ERROR;
}
/* 初始化信号量 */
rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);
/* 以中断接收及轮询发送模式打开串口设备 */
rt_device_open(serial, RT_DEVICE_FLAG_INT_RX);
/* 设置接收回调函数 */
rt_device_set_rx_indicate(serial, uart_input);
/* 发送字符串 */
rt_device_write(serial, 0, str, (sizeof(str) - 1));
/* 创建 serial 线程 */
rt_thread_t thread = rt_thread_create("serial", serial_thread_entry, RT_NULL, 1024, 25, 10);
/* 创建成功则启动线程 */
if (thread != RT_NULL)
{
rt_thread_startup(thread);
}
else
{
ret = RT_ERROR;
}
return ret;
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(uart_sample, uart device sample);
/*自定义的函数*/
/*初始化函数*/
int uart_init(char *port)
{
rt_err_t ret = RT_EOK;
char uart_name[RT_NAME_MAX];
char str[] = "hello RT-Thread!\r\n";
rt_strncpy(uart_name, port, RT_NAME_MAX);
/* 查找系统中的串口设备 */
serial = rt_device_find(uart_name);
if (!serial)
{
rt_kprintf("find %s failed!\n", uart_name);
return RT_ERROR;
}
/* 初始化信号量 */
rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);
/* 以中断接收及轮询发送模式打开串口设备 */
rt_device_open(serial, RT_DEVICE_FLAG_INT_RX);
/* 设置接收回调函数 */
rt_device_set_rx_indicate(serial, uart_input);
/* 发送字符串 */
rt_device_write(serial, 0, str, (sizeof(str) - 1));
/* 创建 serial 线程 */
rt_thread_t thread = rt_thread_create("serial", serial_thread_entry, RT_NULL, 1024, 25, 10);
/* 创建成功则启动线程 */
if (thread != RT_NULL)
{
rt_thread_startup(thread);
}
else
{
ret = RT_ERROR;
}
return ret;
}
/*结束*/
/*发送字符串*/
int uart_sendstring(char *str) {
rt_device_write(serial, 0, str, (strlen(str) - 1));
}
/*结束*/
myuart.h文件
/*
* Copyright (c) 2006-2021, RT-Thread Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2021-11-04 Administrator the first version
*/
#ifndef APPLICATIONS_MYUART_MYUART_H_
#define APPLICATIONS_MYUART_MYUART_H_
/*默认串口*/
#define SAMPLE_UART_NAME "uart1"
int uart_init(char *port);
int uart_sendstring(char *str);
#endif /* APPLICATIONS_MYUART_MYUART_H_ */
main文件
/*
* Copyright (c) 2020-2021, Bluetrum Development Team
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2020/12/10 greedyhao The first version
*/
/**
* Notice!
* All functions or data that are called during an interrupt need to be in RAM.
* You can do it the way exception_isr() does.
*/
#include
#include "board.h"
#include "applications\myuart\myuart.h"
int main(void)
{
uint8_t pin = rt_pin_get("PE.1");
uart_init("uart1");
rt_pin_mode(pin, PIN_MODE_OUTPUT);
rt_kprintf("Hello, world\n");
while (1)
{
uart_sendstring("AT\r\n");
rt_pin_write(pin, PIN_LOW);
rt_thread_mdelay(500);
rt_pin_write(pin, PIN_HIGH);
rt_thread_mdelay(500);
}
}
6、效果展示
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
CentOS7连接无线网络流程介绍2019-07-18 0
-
AB32VG1连接无线网2021-11-04 0
-
初识AB32VG1开发板2022-09-07 0
-
RISC-V架构开发板AB32VG1测评之GPIO点灯2021-10-28 8011
-
【RTT大赛作品连载】 AB32VG1上手2021-10-28 7319
-
使用中科蓝讯AB32VG1 V2.0点亮第一篇2021-11-08 2791
-
【RTT大赛作品连载】AB32VG1评估板到货点灯测试2021-11-04 7449
-
RTT大赛作品:AB32VG1开发板—按键扫描2021-11-15 3872
-
如何在AB32VG1开发板OLED显示使开发板上电2021-11-08 2235
-
【RTT大赛作品连载】AB32VG1的开发环境搭建2021-11-17 8945
-
【RTT大赛作品连载】AB32VG1评估板 炫酷音乐播放器2021-11-26 7416
-
【RTT大赛作品连载】基于AB32VG1 sdk BLE例程2021-12-06 4447
-
【RTT大赛作品连载】AB32VG1开发板之开箱篇2022-01-04 4243
-
【RT-Thread设计大赛】基于AB32VG1的嵌入式网盘2022-07-30 1942
全部0条评论

快来发表一下你的评论吧 !
