

KUKA机器人吸盘真空阀的使用
描述
机器人程序:
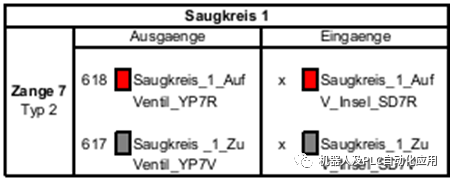
F17-F22 对应控制吸盘1-6 用于控制吸盘的开关
M63,M64-M68 吸盘状态检测
A/E617-628吸盘
钳工具:
SPS MAKRO342 夹抓/吸盘打开
SPS MAKRO343 夹抓/吸盘关闭
SPS MAKRO340 关闭阀控制
F53 关闭吸盘吸气后,不使用关闭吹气,-用于一体阀
F54 是否自动关闭反向吹气的真空阀
F55 第3个阀导的开启先导阀
F56 第2个阀导的开启先导阀
F57 用第1阀导的开启先导阀
F523-带先导阀-
F524-不带先导阀-
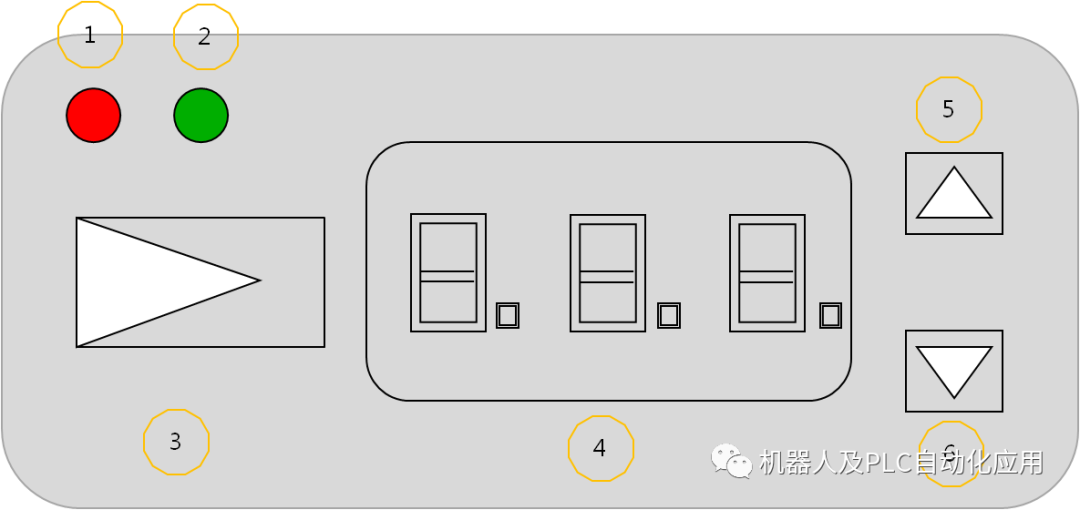
显示介绍:
1、Output1,LED显示红色。
2、Output2,LED显示绿色。
3、Mode按键,用于选择不同的调整程序。
4、数码管显示,测量模式时,显示真空阀真空状态,调整参数时显示不同的选项。
5、Up按键,调整数值。
6、Down按键,调整数值。
锁屏和开锁


开锁和锁屏都是用一样的键.L o C /U n C
1、按住“Mode”键再按“Up”键,出现“out1”及“no”,用“↑↓”键选择out1是常开还是常闭,并用“Mode”键确认。
工作模式:
1、滞后模式(HyS): 以Out1,NO为例,H:关断值 ;h:滞后值 当真空阀内的负压达到H时,真空阀Out1输出1,直到真空阀内压力减小到h,真空阀Out1输出0。( 负压力
2、比较模式(CnP): 以Out2,NO为例,A:基础值 ;b:峰值 当真空阀内的负压达到A且小于b时,真空阀OUT2输出1,其他压力时Out2为0。( 负压力
Out1工作模式选择:
1、 按“Mode”键2次,数码管显示“2”,等待2秒后“Out1”及其工作方式(默认是HyS)交替显示,通过“Up”和“Down”键来选择工作方式,并用“Mode”键确认。
2、 按“Mode”键4次,数码管显示“4”,等待2秒后“Out2”及其工作方式(默认是HyS)交替显示,通过“Up”和“Down”键来选择工作方式,并用“Mode”键确认。
审核编辑 :李倩


-
一种新型玻窗清洁机器人的设计与实现2012-12-20 0
-
KUKA重型机器人2015-02-03 0
-
求KUKA机器人控制柜三维模型2016-04-18 0
-
码垛机器人夹抓可以实现多少种用途2018-08-15 0
-
工业机器人的末端关节旋转该精确控制?2018-11-01 0
-
KUKA机器人问题解答2019-07-15 0
-
库卡KUKA机器人四种启动方式介绍2020-09-04 0
-
KUKA库卡机器人伺服驱动器相关型号举例2020-09-08 0
-
KUKA焊接机器人伺服电机常见故障及维修处理2020-09-26 0
-
工业机器人组成结构相关资料分享2021-07-05 0
-
库卡机器人MGV电源模块维修2021-09-08 0
-
机器人系统与控制需求简介2021-09-08 0
-
KUKA机器人伺服驱动模块维修2021-09-17 0
-
没有有前辈用LabVIEW控制kuka机器人c2的经验?通讯是怎么做到的?2023-10-21 0
-
工业机器人的真空吸盘怎样才能吸的牢固2018-11-11 13856
全部0条评论

快来发表一下你的评论吧 !
